 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmart Explorer: Recognizing Objects in Dense Clutter via Interactive Exploration
Paper and Code
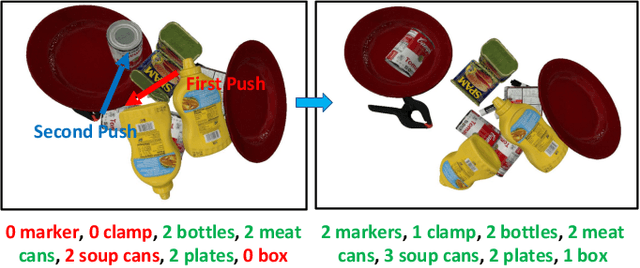
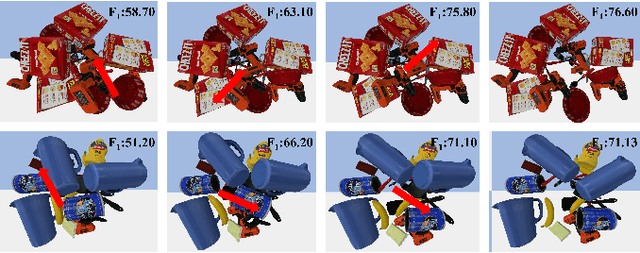
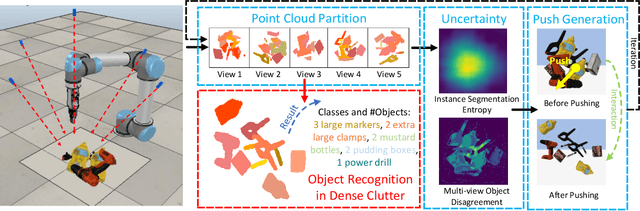
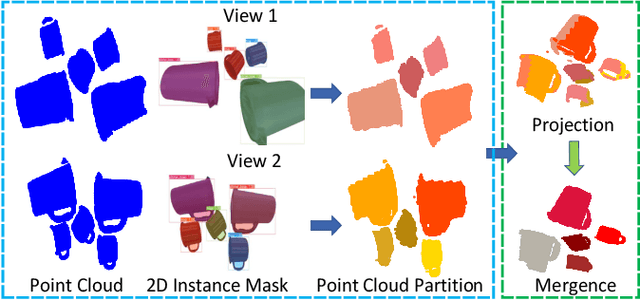
Recognizing objects in dense clutter accurately plays an important role to a wide variety of robotic manipulation tasks including grasping, packing, rearranging and many others. However, conventional visual recognition models usually miss objects because of the significant occlusion among instances and causes incorrect prediction due to the visual ambiguity with the high object crowdedness. In this paper, we propose an interactive exploration framework called Smart Explorer for recognizing all objects in dense clutters. Our Smart Explorer physically interacts with the clutter to maximize the recognition performance while minimize the number of motions, where the false positives and negatives can be alleviated effectively with the optimal accuracy-efficiency trade-offs. Specifically, we first collect the multi-view RGB-D images of the clutter and reconstruct the corresponding point cloud. By aggregating the instance segmentation of RGB images across views, we acquire the instance-wise point cloud partition of the clutter through which the existed classes and the number of objects for each class are predicted. The pushing actions for effective physical interaction are generated to sizably reduce the recognition uncertainty that consists of the instance segmentation entropy and multi-view object disagreement. Therefore, the optimal accuracy-efficiency trade-off of object recognition in dense clutter is achieved via iterative instance prediction and physical interaction. Extensive experiments demonstrate that our Smart Explorer acquires promising recognition accuracy with only a few actions, which also outperforms the random pushing by a large margin.