 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImage-Goal Navigation Using Refined Feature Guidance and Scene Graph Enhancement
Mar 14, 2025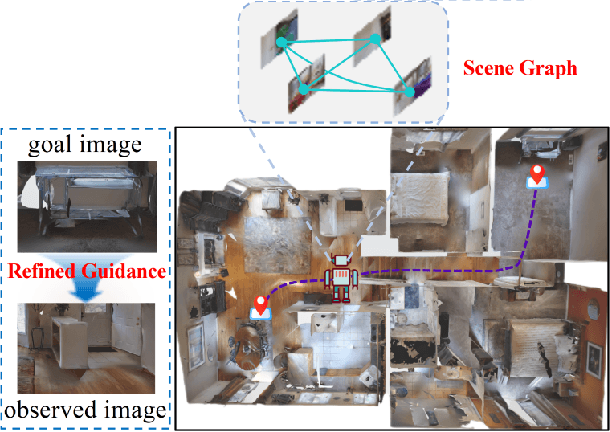
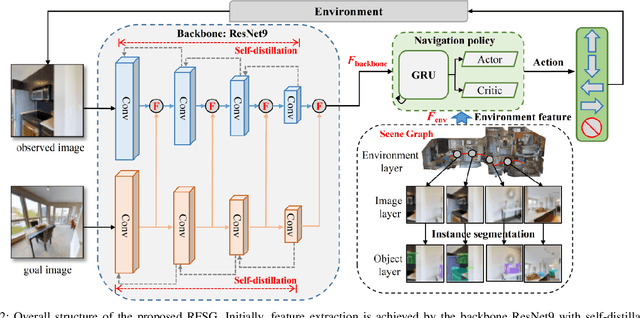
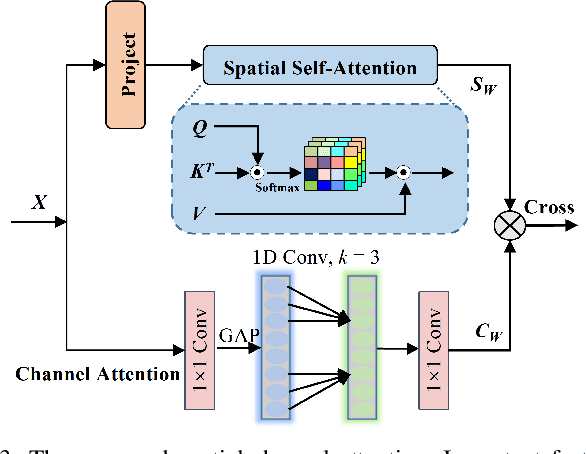
In this paper, we introduce a novel image-goal navigation approach, named RFSG. Our focus lies in leveraging the fine-grained connections between goals, observations, and the environment within limited image data, all the while keeping the navigation architecture simple and lightweight. To this end, we propose the spatial-channel attention mechanism, enabling the network to learn the importance of multi-dimensional features to fuse the goal and observation features. In addition, a selfdistillation mechanism is incorporated to further enhance the feature representation capabilities. Given that the navigation task needs surrounding environmental information for more efficient navigation, we propose an image scene graph to establish feature associations at both the image and object levels, effectively encoding the surrounding scene information. Crossscene performance validation was conducted on the Gibson and HM3D datasets, and the proposed method achieved stateof-the-art results among mainstream methods, with a speed of up to 53.5 frames per second on an RTX3080. This contributes to the realization of end-to-end image-goal navigation in realworld scenarios. The implementation and model of our method have been released at: https://github.com/nubot-nudt/RFSG.
FedFTN: Personalized Federated Learning with Deep Feature Transformation Network for Multi-institutional Low-count PET Denoising
Apr 02, 2023Low-count PET is an efficient way to reduce radiation exposure and acquisition time, but the reconstructed images often suffer from low signal-to-noise ratio (SNR), thus affecting diagnosis and other downstream tasks. Recent advances in deep learning have shown great potential in improving low-count PET image quality, but acquiring a large, centralized, and diverse dataset from multiple institutions for training a robust model is difficult due to privacy and security concerns of patient data. Moreover, low-count PET data at different institutions may have different data distribution, thus requiring personalized models. While previous federated learning (FL) algorithms enable multi-institution collaborative training without the need of aggregating local data, addressing the large domain shift in the application of multi-institutional low-count PET denoising remains a challenge and is still highly under-explored. In this work, we propose FedFTN, a personalized federated learning strategy that addresses these challenges. FedFTN uses a local deep feature transformation network (FTN) to modulate the feature outputs of a globally shared denoising network, enabling personalized low-count PET denoising for each institution. During the federated learning process, only the denoising network's weights are communicated and aggregated, while the FTN remains at the local institutions for feature transformation. We evaluated our method using a large-scale dataset of multi-institutional low-count PET imaging data from three medical centers located across three continents, and showed that FedFTN provides high-quality low-count PET images, outperforming previous baseline FL reconstruction methods across all low-count levels at all three institutions.