 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOffline RL with Smooth OOD Generalization in Convex Hull and its Neighborhood
Jun 10, 2025Offline Reinforcement Learning (RL) struggles with distributional shifts, leading to the $Q$-value overestimation for out-of-distribution (OOD) actions. Existing methods address this issue by imposing constraints; however, they often become overly conservative when evaluating OOD regions, which constrains the $Q$-function generalization. This over-constraint issue results in poor $Q$-value estimation and hinders policy improvement. In this paper, we introduce a novel approach to achieve better $Q$-value estimation by enhancing $Q$-function generalization in OOD regions within Convex Hull and its Neighborhood (CHN). Under the safety generalization guarantees of the CHN, we propose the Smooth Bellman Operator (SBO), which updates OOD $Q$-values by smoothing them with neighboring in-sample $Q$-values. We theoretically show that SBO approximates true $Q$-values for both in-sample and OOD actions within the CHN. Our practical algorithm, Smooth Q-function OOD Generalization (SQOG), empirically alleviates the over-constraint issue, achieving near-accurate $Q$-value estimation. On the D4RL benchmarks, SQOG outperforms existing state-of-the-art methods in both performance and computational efficiency.
MFTCoder: Boosting Code LLMs with Multitask Fine-Tuning
Nov 04, 2023Code LLMs have emerged as a specialized research field, with remarkable studies dedicated to enhancing model's coding capabilities through fine-tuning on pre-trained models. Previous fine-tuning approaches were typically tailored to specific downstream tasks or scenarios, which meant separate fine-tuning for each task, requiring extensive training resources and posing challenges in terms of deployment and maintenance. Furthermore, these approaches failed to leverage the inherent interconnectedness among different code-related tasks. To overcome these limitations, we present a multi-task fine-tuning framework, MFTcoder, that enables simultaneous and parallel fine-tuning on multiple tasks. By incorporating various loss functions, we effectively address common challenges in multi-task learning, such as data imbalance, varying difficulty levels, and inconsistent convergence speeds. Extensive experiments have conclusively demonstrated that our multi-task fine-tuning approach outperforms both individual fine-tuning on single tasks and fine-tuning on a mixed ensemble of tasks. Moreover, MFTcoder offers efficient training capabilities, including efficient data tokenization modes and PEFT fine-tuning, resulting in significantly improved speed compared to traditional fine-tuning methods. MFTcoder seamlessly integrates with several mainstream open-source LLMs, such as CodeLLama and Qwen. Leveraging the CodeLLama foundation, our MFTcoder fine-tuned model, \textsc{CodeFuse-CodeLLama-34B}, achieves an impressive pass@1 score of 74.4\% on the HumaneEval benchmark, surpassing GPT-4 performance (67\%, zero-shot). MFTCoder is open-sourced at \url{https://github.com/codefuse-ai/MFTCOder}
CodeFuse-13B: A Pretrained Multi-lingual Code Large Language Model
Oct 10, 2023Code Large Language Models (Code LLMs) have gained significant attention in the industry due to their wide applications in the full lifecycle of software engineering. However, the effectiveness of existing models in understanding non-English inputs for multi-lingual code-related tasks is still far from well studied. This paper introduces CodeFuse-13B, an open-sourced pre-trained code LLM. It is specifically designed for code-related tasks with both English and Chinese prompts and supports over 40 programming languages. CodeFuse achieves its effectiveness by utilizing a high quality pre-training dataset that is carefully filtered by program analyzers and optimized during the training process. Extensive experiments are conducted using real-world usage scenarios, the industry-standard benchmark HumanEval-x, and the specially designed CodeFuseEval for Chinese prompts. To assess the effectiveness of CodeFuse, we actively collected valuable human feedback from the AntGroup's software development process where CodeFuse has been successfully deployed. The results demonstrate that CodeFuse-13B achieves a HumanEval pass@1 score of 37.10%, positioning it as one of the top multi-lingual code LLMs with similar parameter sizes. In practical scenarios, such as code generation, code translation, code comments, and testcase generation, CodeFuse performs better than other models when confronted with Chinese prompts.
BALANCE: Bayesian Linear Attribution for Root Cause Localization
Jan 31, 2023



Root Cause Analysis (RCA) plays an indispensable role in distributed data system maintenance and operations, as it bridges the gap between fault detection and system recovery. Existing works mainly study multidimensional localization or graph-based root cause localization. This paper opens up the possibilities of exploiting the recently developed framework of explainable AI (XAI) for the purpose of RCA. In particular, we propose BALANCE (BAyesian Linear AttributioN for root CausE localization), which formulates the problem of RCA through the lens of attribution in XAI and seeks to explain the anomalies in the target KPIs by the behavior of the candidate root causes. BALANCE consists of three innovative components. First, we propose a Bayesian multicollinear feature selection (BMFS) model to predict the target KPIs given the candidate root causes in a forward manner while promoting sparsity and concurrently paying attention to the correlation between the candidate root causes. Second, we introduce attribution analysis to compute the attribution score for each candidate in a backward manner. Third, we merge the estimated root causes related to each KPI if there are multiple KPIs. We extensively evaluate the proposed BALANCE method on one synthesis dataset as well as three real-world RCA tasks, that is, bad SQL localization, container fault localization, and fault type diagnosis for Exathlon. Results show that BALANCE outperforms the state-of-the-art (SOTA) methods in terms of accuracy with the least amount of running time, and achieves at least $6\%$ notably higher accuracy than SOTA methods for real tasks. BALANCE has been deployed to production to tackle real-world RCA problems, and the online results further advocate its usage for real-time diagnosis in distributed data systems.
Eye in the Sky: Drone-Based Object Tracking and 3D Localization
Oct 18, 2019
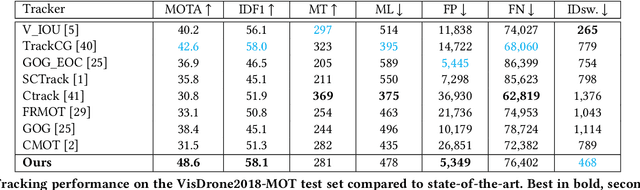

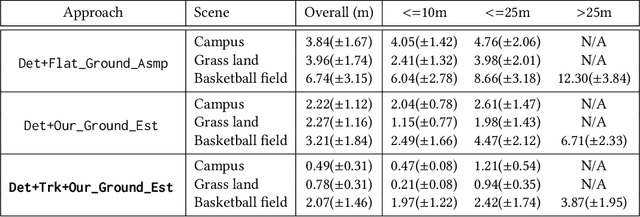
Drones, or general UAVs, equipped with a single camera have been widely deployed to a broad range of applications, such as aerial photography, fast goods delivery and most importantly, surveillance. Despite the great progress achieved in computer vision algorithms, these algorithms are not usually optimized for dealing with images or video sequences acquired by drones, due to various challenges such as occlusion, fast camera motion and pose variation. In this paper, a drone-based multi-object tracking and 3D localization scheme is proposed based on the deep learning based object detection. We first combine a multi-object tracking method called TrackletNet Tracker (TNT) which utilizes temporal and appearance information to track detected objects located on the ground for UAV applications. Then, we are also able to localize the tracked ground objects based on the group plane estimated from the Multi-View Stereo technique. The system deployed on the drone can not only detect and track the objects in a scene, but can also localize their 3D coordinates in meters with respect to the drone camera. The experiments have proved our tracker can reliably handle most of the detected objects captured by drones and achieve favorable 3D localization performance when compared with the state-of-the-art methods.