 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Pathfinding with Non-Unit Integer Edge Costs via Enhanced Conflict-Based Search and Graph Discretization
Apr 07, 2026Multi-Agent Pathfinding (MAPF) plays a critical role in various domains. Traditional MAPF methods typically assume unit edge costs and single-timestep actions, which limit their applicability to real-world scenarios. MAPFR extends MAPF to handle non-unit costs with real-valued edge costs and continuous-time actions, but its geometric collision model leads to an unbounded state space that compromises solver efficiency. In this paper, we propose MAPFZ, a novel MAPF variant on graphs with non-unit integer costs that preserves a finite state space while offering improved realism over classical MAPF. To solve MAPFZ efficiently, we develop CBS-NIC, an enhanced Conflict-Based Search framework incorporating time-interval-based conflict detection and an improved Safe Interval Path Planning (SIPP) algorithm. Additionally, we propose Bayesian Optimization for Graph Design (BOGD), a discretization method for non-unit edge costs that balances efficiency and accuracy with a sub-linear regret bound. Extensive experiments demonstrate that our approach outperforms state-of-the-art methods in runtime and success rate across diverse benchmark scenarios.
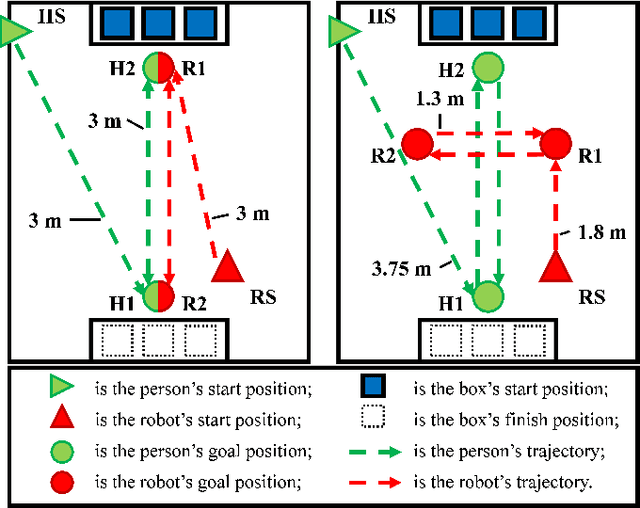
Online Context Learning for Socially-compliant Navigation
Jun 17, 2024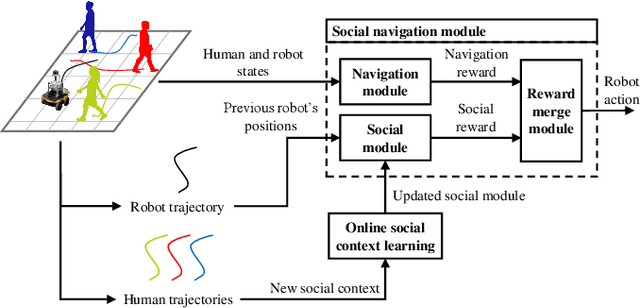
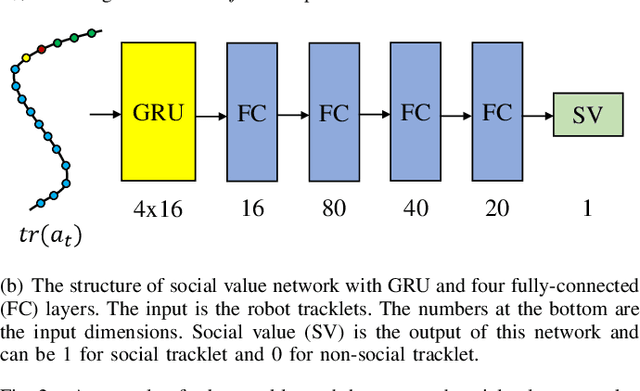
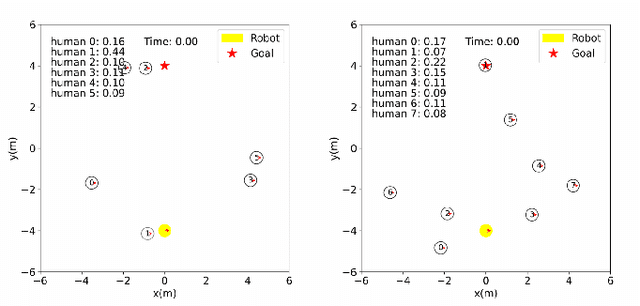
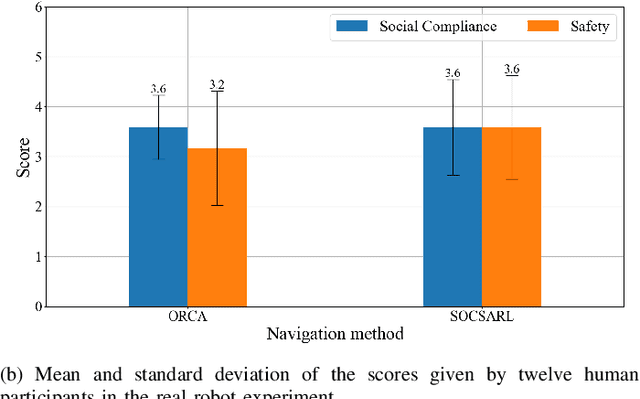
Robot social navigation needs to adapt to different human factors and environmental contexts. However, since these factors and contexts are difficult to predict and cannot be exhaustively enumerated, traditional learning-based methods have difficulty in ensuring the social attributes of robots in long-term and cross-environment deployments. This letter introduces an online context learning method that aims to empower robots to adapt to new social environments online. The proposed method adopts a two-layer structure. The bottom layer is built using a deep reinforcement learning-based method to ensure the output of basic robot navigation commands. The upper layer is implemented using an online robot learning-based method to socialize the control commands suggested by the bottom layer. Experiments using a community-wide simulator show that our method outperforms the state-of-the-art ones. Experimental results in the most challenging scenarios show that our method improves the performance of the state-of-the-art by 8%. The source code of the proposed method, the data used, and the tools for the per-training step will be publicly available at https://github.com/Nedzhaken/SOCSARL-OL.
Towards Long-term Autonomy: A Perspective from Robot Learning
Jan 02, 2023In the future, service robots are expected to be able to operate autonomously for long periods of time without human intervention. Many work striving for this goal have been emerging with the development of robotics, both hardware and software. Today we believe that an important underpinning of long-term robot autonomy is the ability of robots to learn on site and on-the-fly, especially when they are deployed in changing environments or need to traverse different environments. In this paper, we examine the problem of long-term autonomy from the perspective of robot learning, especially in an online way, and discuss in tandem its premise "data" and the subsequent "deployment".
Software-hardware Integration and Human-centered Benchmarking for Socially-compliant Robot Navigation
Oct 27, 2022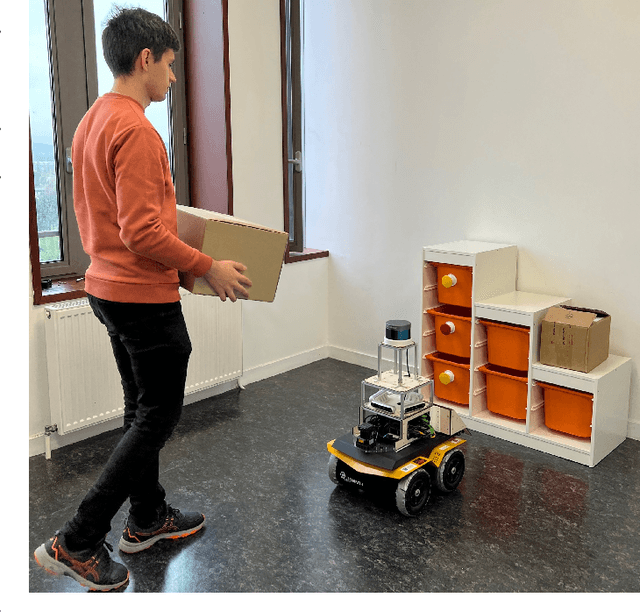

The social compatibility (SC) is one of the most important parameters for service robots. It characterises the interaction quality between a robot and a human. In this paper, we first introduce an open-source software-hardware integration scheme for socially-compliant robot navigation and then propose a human-centered benchmarking framework. For the former, we integrate one 3D lidar, one 2D lidar, and four RGB-D cameras for robot exterior perception. The software system is entirely based on the Robot Operating System (ROS) with high modularity and fully deployed to the embedded hardware-based edge while running at a rate that exceeds the release frequency of sensor data. For the latter, we propose a new human-centered performance evaluation metric that can be used to measure SC quickly and efficiently. The values of this metric correlate with the results of the Godspeed questionnaire, which is believed to be a golden standard approach for SC measurements. Together with other commonly used metrics, we benchmark two open-source socially-compliant robot navigation methods, in an end-to-end manner. We clarify all aspects of the benchmarking to ensure the reproducibility of the experiments. We also show that the proposed new metric can provide further justification for the selection of numerical metrics (objective) from a human perspective (subjective).
3D ToF LiDAR in Mobile Robotics: A Review
Feb 22, 2022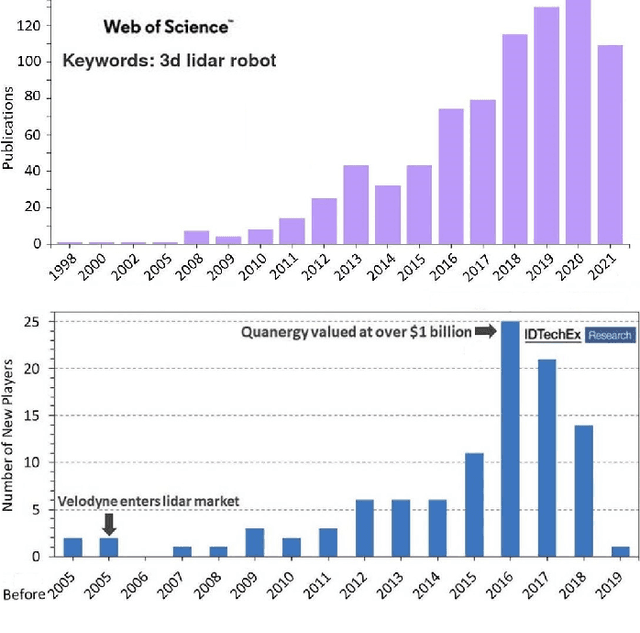
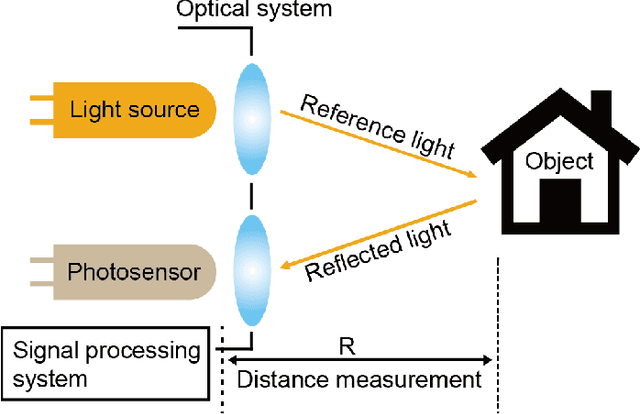
In the past ten years, the use of 3D Time-of-Flight (ToF) LiDARs in mobile robotics has grown rapidly. Based on our accumulation of relevant research, this article systematically reviews and analyzes the use 3D ToF LiDARs in research and industrial applications. The former includes object detection, robot localization, long-term autonomy, LiDAR data processing under adverse weather conditions, and sensor fusion. The latter encompasses service robots, assisted and autonomous driving, and recent applications performed in response to public health crises. We hope that our efforts can effectively provide readers with relevant references and promote the deployment of existing mature technologies in real-world systems.
Efficient Online Transfer Learning for 3D Object Classification in Autonomous Driving
May 04, 2021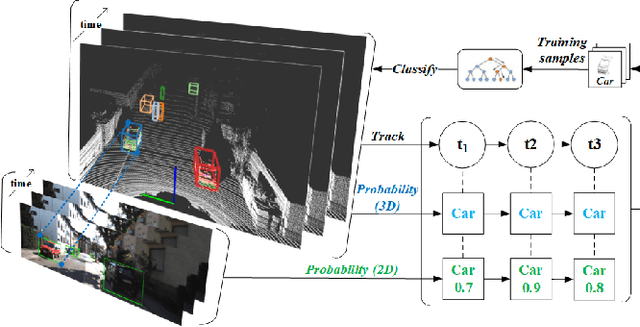
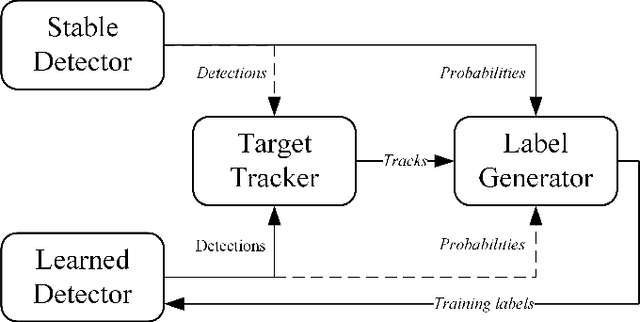
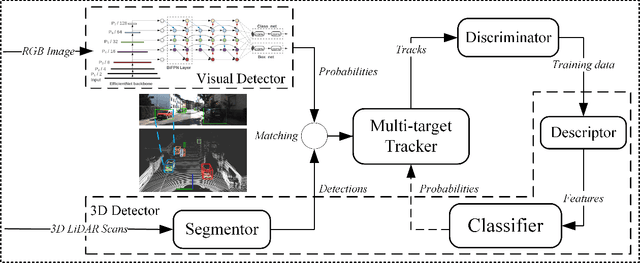
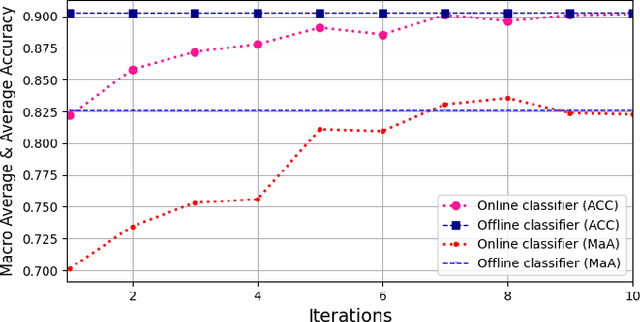
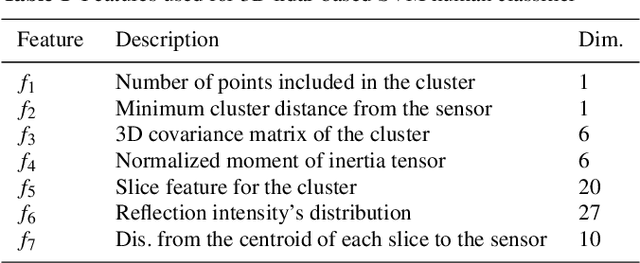
Autonomous driving has achieved rapid development over the last few decades, including the machine perception as an important issue of it. Although object detection based on conventional cameras has achieved remarkable results in 2D/3D, non-visual sensors such as 3D LiDAR still have incomparable advantages in the accuracy of object position detection. However, the challenge also exists with the difficulty in properly interpreting point cloud generated by LiDAR. This paper presents a multi-modal-based online learning system for 3D LiDAR-based object classification in urban environments, including cars, cyclists and pedestrians. The proposed system aims to effectively transfer the mature detection capabilities based on visual sensors to the new model learning based on non-visual sensors through a multi-target tracker (i.e. using one sensor to train another). In particular, it integrates the Online Random Forests (ORF) \cite{saffari2009line} method, which inherently has the abilities of fast and multi-class learning. Through experiments, we show that our system is capable of learning a high-performance model for LiDAR-based 3D object classification on-the-fly, which is especially suitable for robotics in-situ deployment while responding to the widespread challenge of insufficient detector generalization capabilities.
Time-of-Flight LiDAR-based Precise Mapping
Sep 21, 2020Last two decades, the problem of robotic mapping has made a lot of progress in the research community. However, since the data provided by the sensor still contains noise, how to obtain an accurate map is still an open problem. In this note, we analyze the problem from the perspective of mathematical analysis and propose a probabilistic map update method based on multiple explorations. The proposed method can help us estimate the number of rounds of robot exploration, which is meaningful for the hardware and time costs of the task.
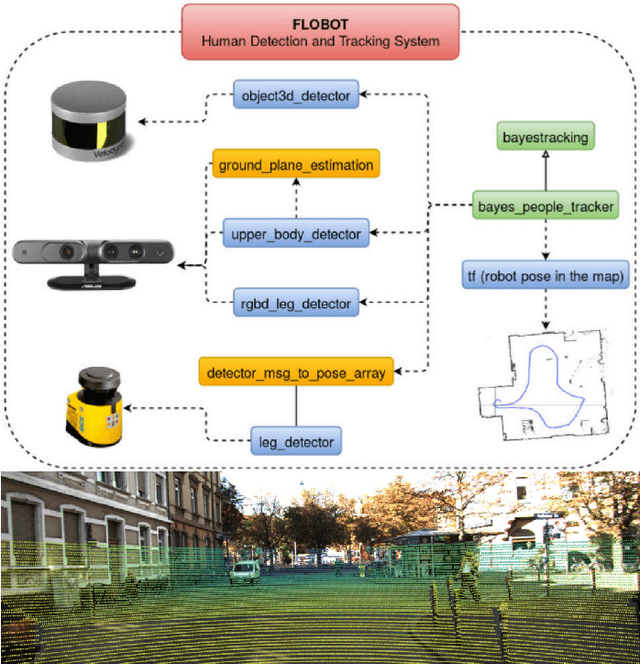
Robot Perception of Static and Dynamic Objects with an Autonomous Floor Scrubber
Feb 24, 2020
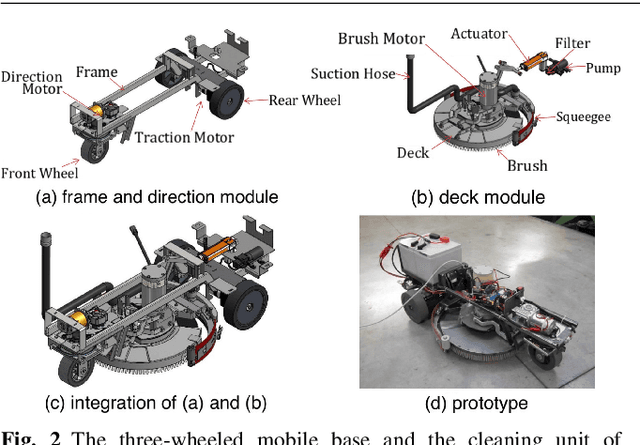
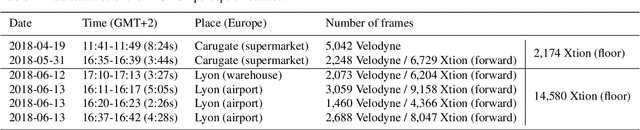
This paper presents the perception system of a new professional cleaning robot for large public places. The proposed system is based on multiple sensors including 3D and 2D lidar, two RGB-D cameras and a stereo camera. The two lidars together with an RGB-D camera are used for dynamic object (human) detection and tracking, while the second RGB-D and stereo camera are used for detection of static objects (dirt and ground objects). A learning and reasoning module for spatial-temporal representation of the environment based on the perception pipeline is also introduced. Furthermore, a new dataset collected with the robot in several public places, including a supermarket, a warehouse and an airport, is released. Baseline results on this dataset for further research and comparison are provided. The proposed system has been fully implemented into the Robot Operating System (ROS) with high modularity, also publicly available to the community.
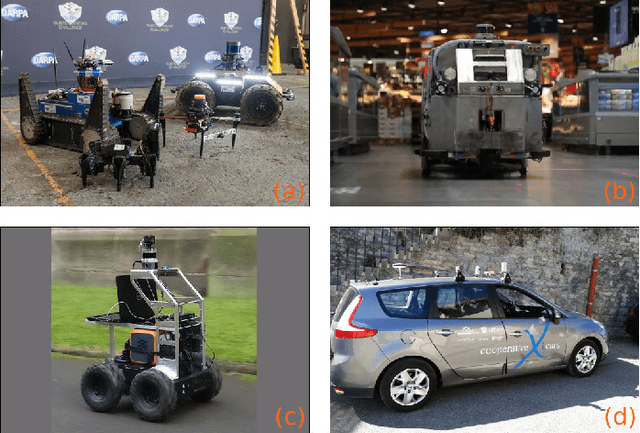
EU Long-term Dataset with Multiple Sensors for Autonomous Driving
Sep 07, 2019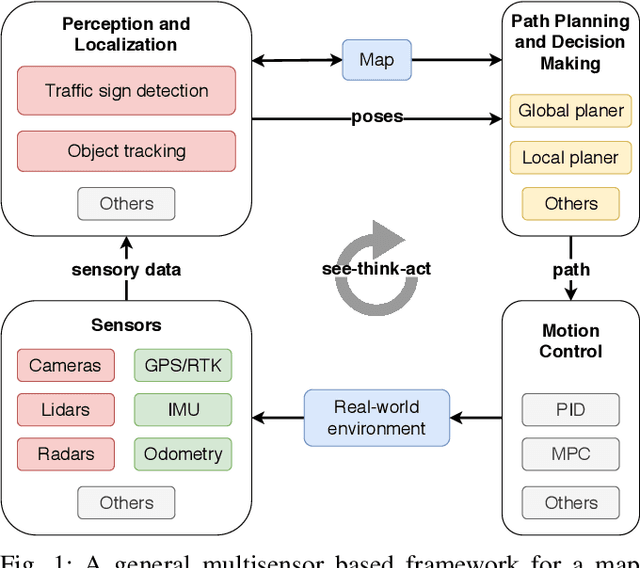
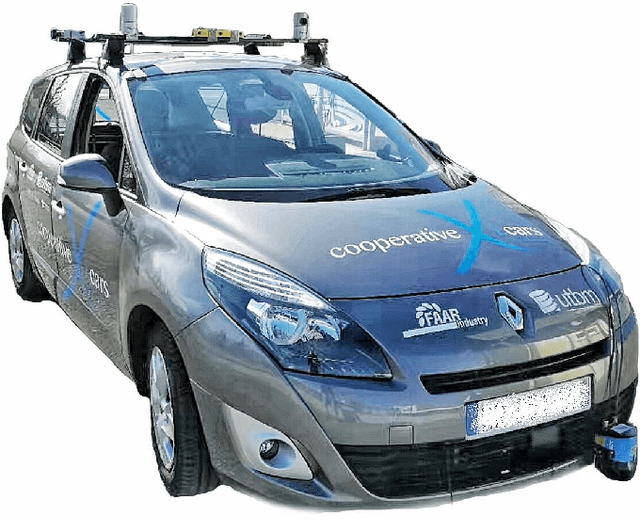
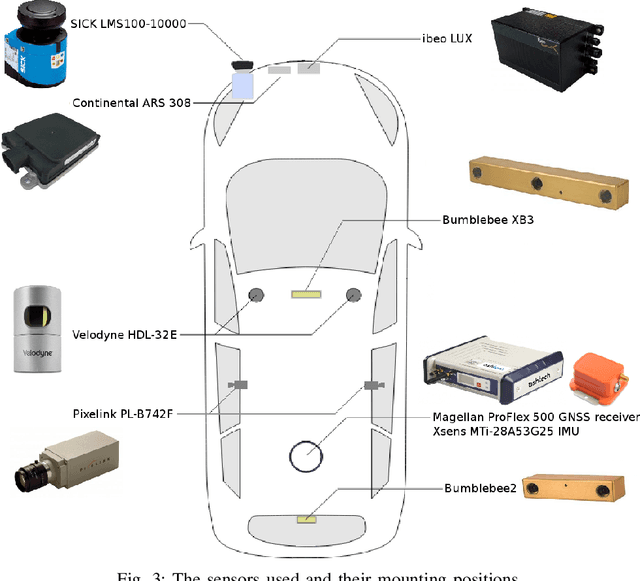
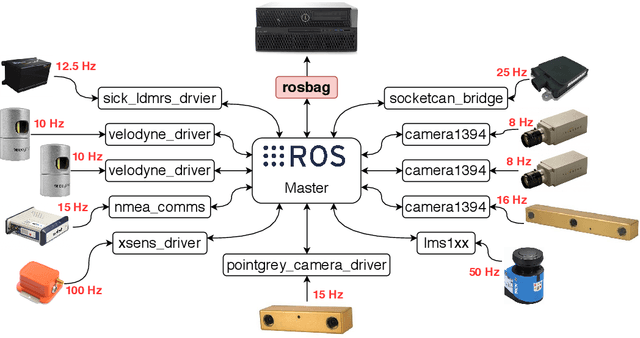
The field of autonomous driving has grown tremendously over the past few years, along with the rapid progress in sensor technology. One of the major purposes of using sensors is to provide environment perception for vehicle understanding, learning and reasoning, and ultimately interacting with the environment. In this article, we introduce a multisensor framework allowing vehicle to perceive its surroundings and locate itself in a more efficient and accurate way. Our framework integrates up to eleven heterogeneous sensors including various cameras and lidars, a radar, an IMU (Inertial Measurement Unit), and a GPS/RTK (Global Positioning System / Real-Time Kinematic), while exploits a ROS (Robot Operating System) based software to process the sensory data. In addition, we present a new dataset (https://epan-utbm.github.io/utbm_robocar_dataset/) for autonomous driving captured many new research challenges (e.g. highly dynamic environment), and especially for long-term autonomy (e.g. creating and maintaining maps), collected with our instrumented vehicle, publicly available to the community.
EPANer Team Description Paper for World Robot Challenge 2020
Sep 05, 2019
This paper presents the research focus and ideas incorporated in the EPANer robotics team, entering the World Robot Challenge 2020 - Partner Robot Challenge (Real Space).