 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeature points evaluation on omnidirectional vision with a photorealistic fisheye sequence -- A report on experiments done in 2014
Feb 05, 2026What is this report: This is a scientific report, contributing with a detailed bibliography, a dataset which we will call now PFSeq for ''Photorealistic Fisheye Sequence'' and make available at https://doi.org/10. 57745/DYIVVU, and comprehensive experiments. This work should be considered as a draft, and has been done during my PhD thesis ''Construction of 3D models from fisheye video data-Application to the localisation in urban area'' in 2014 [Mor16]. These results have never been published. The aim was to find the best features detector and descriptor for fisheye images, in the context of selfcalibration, with cameras mounted on the top of a car and aiming at the zenith (to proceed then fisheye visual odometry and stereovision in urban scenes). We face a chicken and egg problem, because we can not take advantage of an accurate projection model for an optimal features detection and description, and we rightly need good features to perform the calibration (i.e. to compute the accurate projection model of the camera). What is not this report: It does not contribute with new features algorithm. It does not compare standard features algorithms to algorithms designed for omnidirectional images (unfortunately). It has not been peer-reviewed. Discussions have been translated and enhanced but the experiments have not been run again and the report has not been updated accordingly to the evolution of the state-of-the-art (read this as a 2014 report).
End-to-end Inception-Unet based Generative Adversarial Networks for Snow and Rain Removals
Nov 07, 2024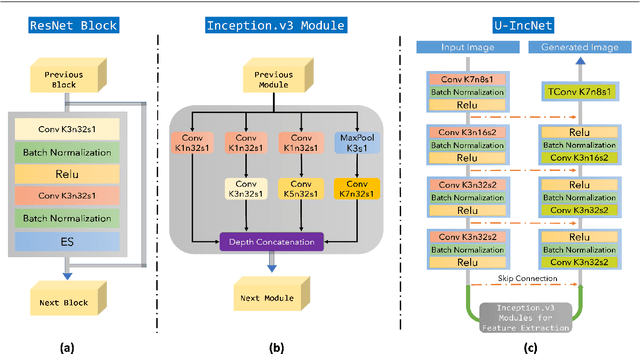
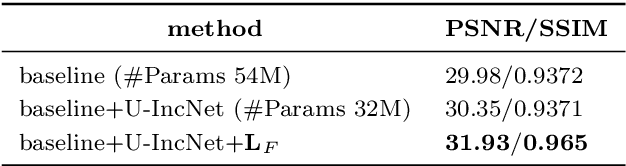
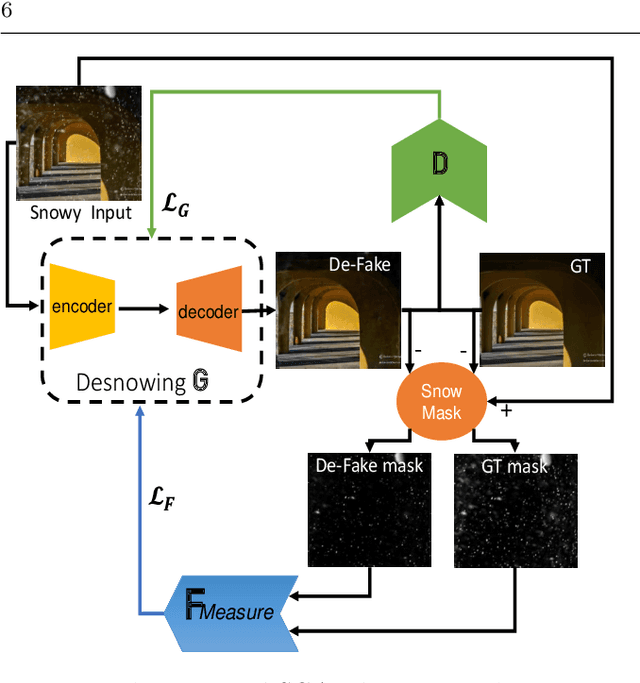

The superior performance introduced by deep learning approaches in removing atmospheric particles such as snow and rain from a single image; favors their usage over classical ones. However, deep learning-based approaches still suffer from challenges related to the particle appearance characteristics such as size, type, and transparency. Furthermore, due to the unique characteristics of rain and snow particles, single network based deep learning approaches struggle in handling both degradation scenarios simultaneously. In this paper, a global framework that consists of two Generative Adversarial Networks (GANs) is proposed where each handles the removal of each particle individually. The architectures of both desnowing and deraining GANs introduce the integration of a feature extraction phase with the classical U-net generator network which in turn enhances the removal performance in the presence of severe variations in size and appearance. Furthermore, a realistic dataset that contains pairs of snowy images next to their groundtruth images estimated using a low-rank approximation approach; is presented. The experiments show that the proposed desnowing and deraining approaches achieve significant improvements in comparison to the state-of-the-art approaches when tested on both synthetic and realistic datasets.
Online Context Learning for Socially-compliant Navigation
Jun 17, 2024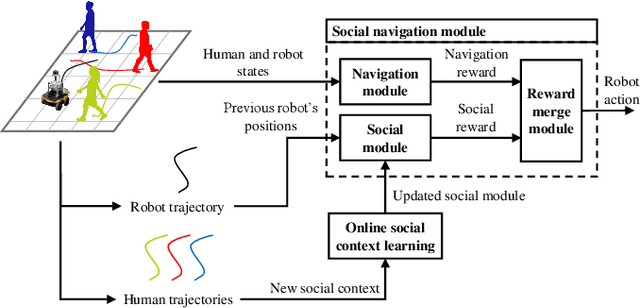
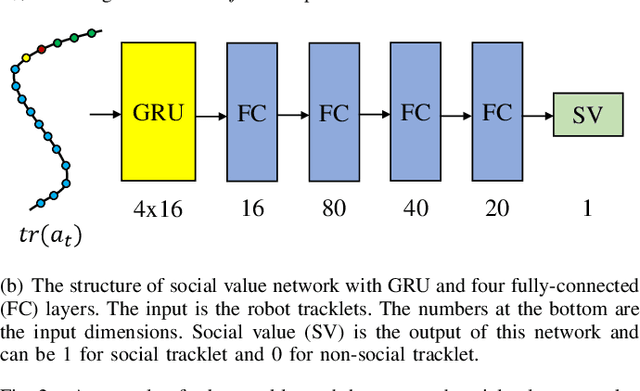
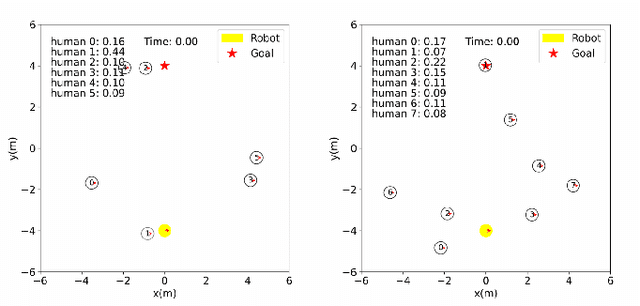
Robot social navigation needs to adapt to different human factors and environmental contexts. However, since these factors and contexts are difficult to predict and cannot be exhaustively enumerated, traditional learning-based methods have difficulty in ensuring the social attributes of robots in long-term and cross-environment deployments. This letter introduces an online context learning method that aims to empower robots to adapt to new social environments online. The proposed method adopts a two-layer structure. The bottom layer is built using a deep reinforcement learning-based method to ensure the output of basic robot navigation commands. The upper layer is implemented using an online robot learning-based method to socialize the control commands suggested by the bottom layer. Experiments using a community-wide simulator show that our method outperforms the state-of-the-art ones. Experimental results in the most challenging scenarios show that our method improves the performance of the state-of-the-art by 8%. The source code of the proposed method, the data used, and the tools for the per-training step will be publicly available at https://github.com/Nedzhaken/SOCSARL-OL.
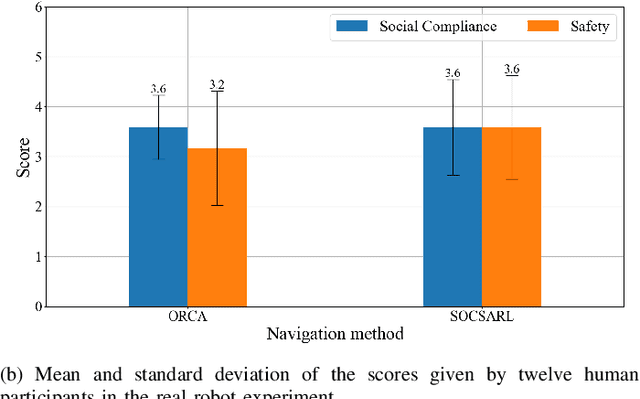
Software-hardware Integration and Human-centered Benchmarking for Socially-compliant Robot Navigation
Oct 27, 2022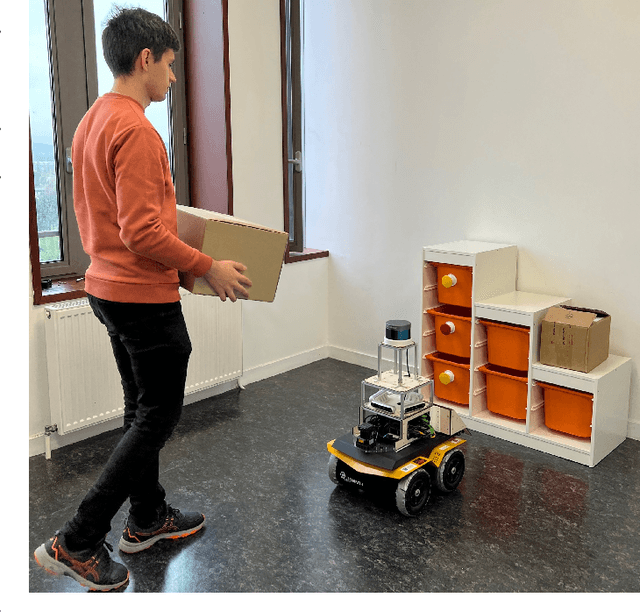
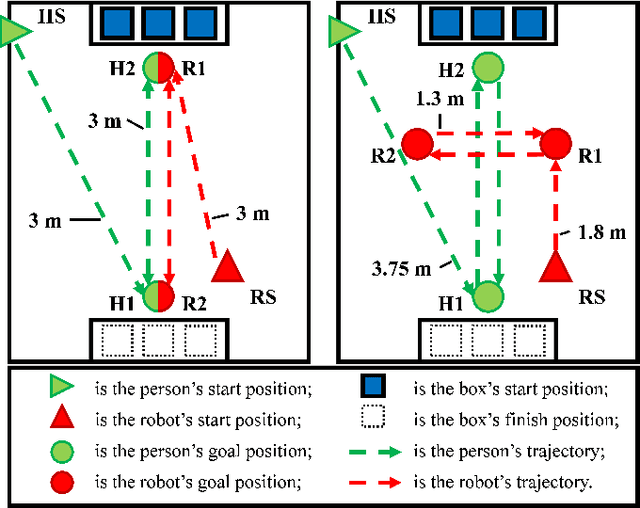

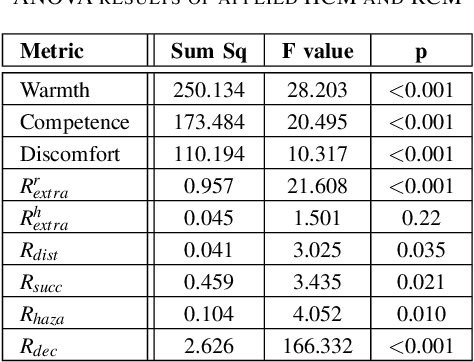
The social compatibility (SC) is one of the most important parameters for service robots. It characterises the interaction quality between a robot and a human. In this paper, we first introduce an open-source software-hardware integration scheme for socially-compliant robot navigation and then propose a human-centered benchmarking framework. For the former, we integrate one 3D lidar, one 2D lidar, and four RGB-D cameras for robot exterior perception. The software system is entirely based on the Robot Operating System (ROS) with high modularity and fully deployed to the embedded hardware-based edge while running at a rate that exceeds the release frequency of sensor data. For the latter, we propose a new human-centered performance evaluation metric that can be used to measure SC quickly and efficiently. The values of this metric correlate with the results of the Godspeed questionnaire, which is believed to be a golden standard approach for SC measurements. Together with other commonly used metrics, we benchmark two open-source socially-compliant robot navigation methods, in an end-to-end manner. We clarify all aspects of the benchmarking to ensure the reproducibility of the experiments. We also show that the proposed new metric can provide further justification for the selection of numerical metrics (objective) from a human perspective (subjective).
Efficient Online Transfer Learning for 3D Object Classification in Autonomous Driving
May 04, 2021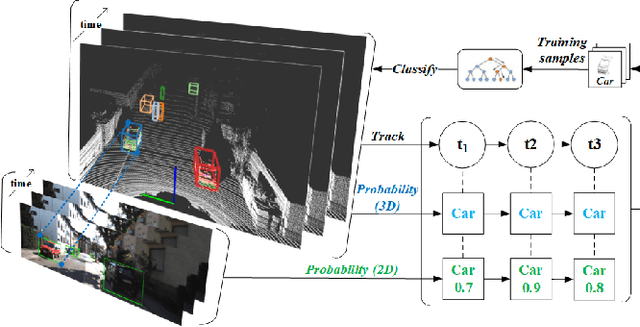
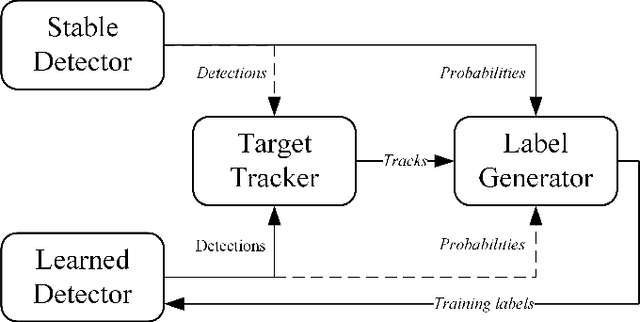
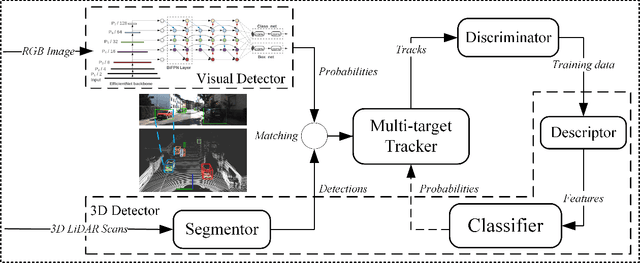
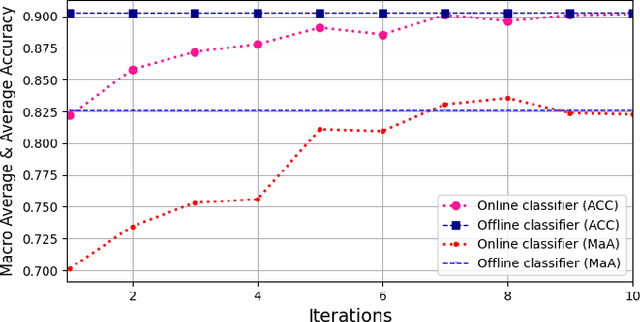
Autonomous driving has achieved rapid development over the last few decades, including the machine perception as an important issue of it. Although object detection based on conventional cameras has achieved remarkable results in 2D/3D, non-visual sensors such as 3D LiDAR still have incomparable advantages in the accuracy of object position detection. However, the challenge also exists with the difficulty in properly interpreting point cloud generated by LiDAR. This paper presents a multi-modal-based online learning system for 3D LiDAR-based object classification in urban environments, including cars, cyclists and pedestrians. The proposed system aims to effectively transfer the mature detection capabilities based on visual sensors to the new model learning based on non-visual sensors through a multi-target tracker (i.e. using one sensor to train another). In particular, it integrates the Online Random Forests (ORF) \cite{saffari2009line} method, which inherently has the abilities of fast and multi-class learning. Through experiments, we show that our system is capable of learning a high-performance model for LiDAR-based 3D object classification on-the-fly, which is especially suitable for robotics in-situ deployment while responding to the widespread challenge of insufficient detector generalization capabilities.
EU Long-term Dataset with Multiple Sensors for Autonomous Driving
Sep 07, 2019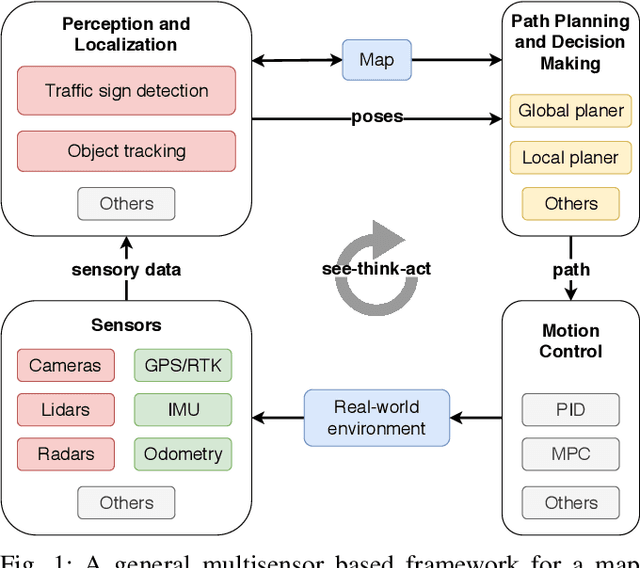
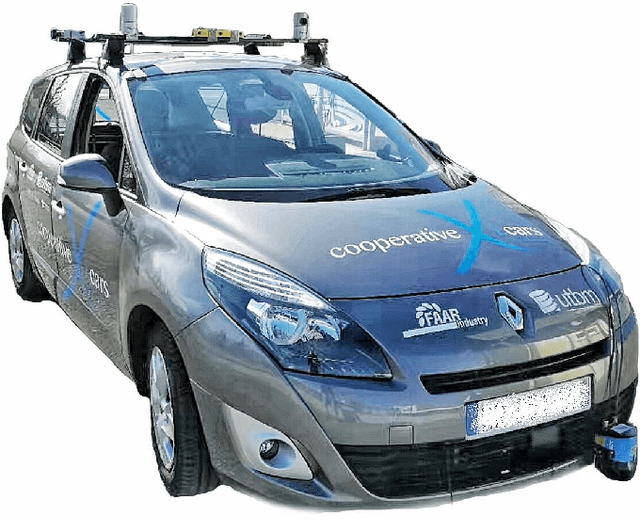
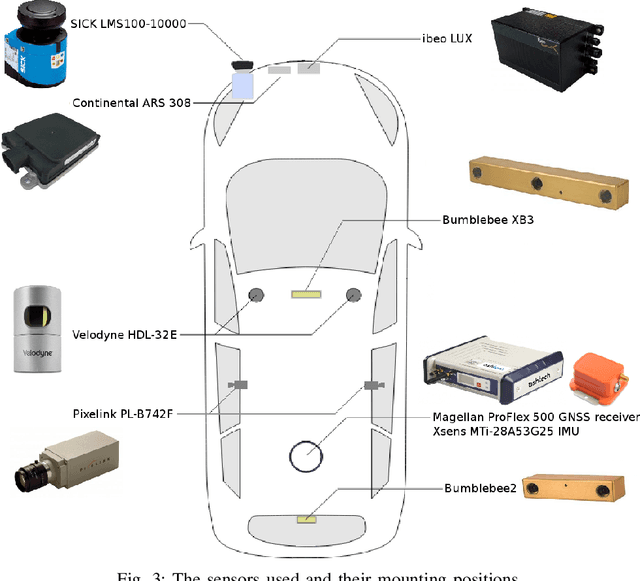
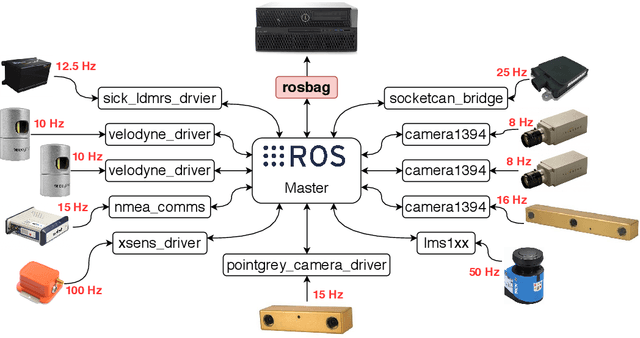
The field of autonomous driving has grown tremendously over the past few years, along with the rapid progress in sensor technology. One of the major purposes of using sensors is to provide environment perception for vehicle understanding, learning and reasoning, and ultimately interacting with the environment. In this article, we introduce a multisensor framework allowing vehicle to perceive its surroundings and locate itself in a more efficient and accurate way. Our framework integrates up to eleven heterogeneous sensors including various cameras and lidars, a radar, an IMU (Inertial Measurement Unit), and a GPS/RTK (Global Positioning System / Real-Time Kinematic), while exploits a ROS (Robot Operating System) based software to process the sensory data. In addition, we present a new dataset (https://epan-utbm.github.io/utbm_robocar_dataset/) for autonomous driving captured many new research challenges (e.g. highly dynamic environment), and especially for long-term autonomy (e.g. creating and maintaining maps), collected with our instrumented vehicle, publicly available to the community.