 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Context Learning for Socially-compliant Navigation
Jun 17, 2024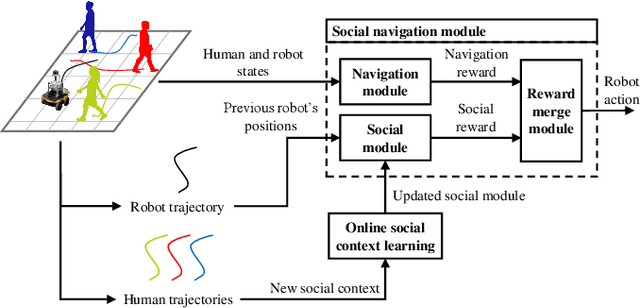
Robot social navigation needs to adapt to different human factors and environmental contexts. However, since these factors and contexts are difficult to predict and cannot be exhaustively enumerated, traditional learning-based methods have difficulty in ensuring the social attributes of robots in long-term and cross-environment deployments. This letter introduces an online context learning method that aims to empower robots to adapt to new social environments online. The proposed method adopts a two-layer structure. The bottom layer is built using a deep reinforcement learning-based method to ensure the output of basic robot navigation commands. The upper layer is implemented using an online robot learning-based method to socialize the control commands suggested by the bottom layer. Experiments using a community-wide simulator show that our method outperforms the state-of-the-art ones. Experimental results in the most challenging scenarios show that our method improves the performance of the state-of-the-art by 8%. The source code of the proposed method, the data used, and the tools for the per-training step will be publicly available at https://github.com/Nedzhaken/SOCSARL-OL.
Software-hardware Integration and Human-centered Benchmarking for Socially-compliant Robot Navigation
Oct 27, 2022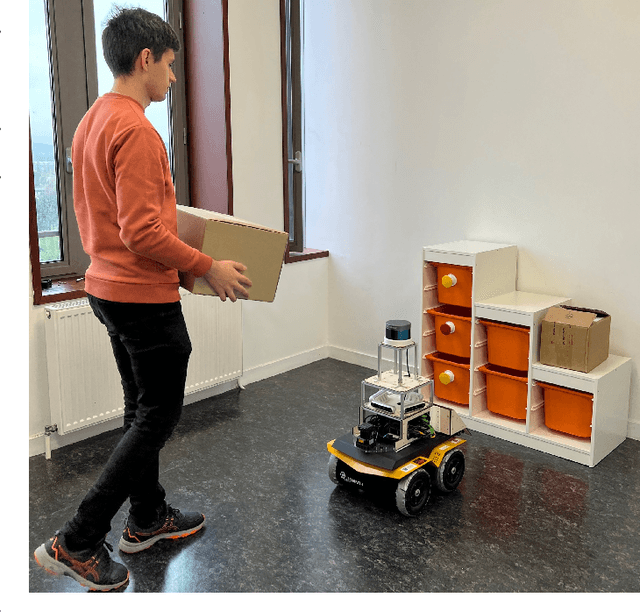
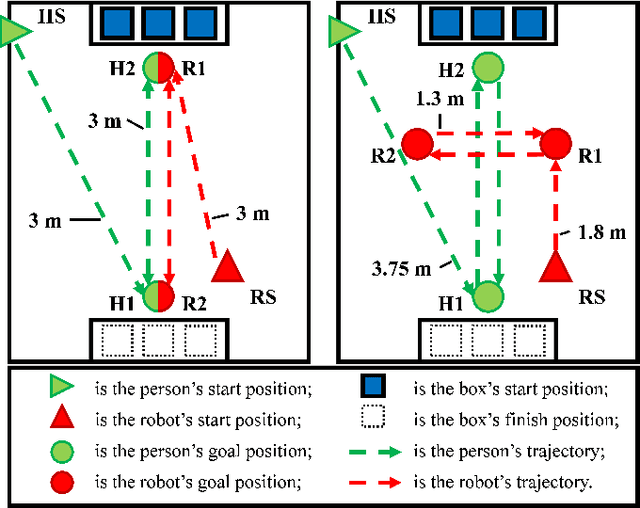

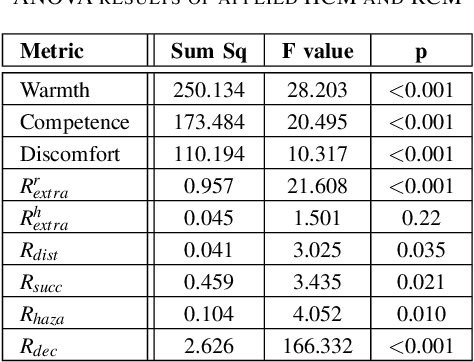
The social compatibility (SC) is one of the most important parameters for service robots. It characterises the interaction quality between a robot and a human. In this paper, we first introduce an open-source software-hardware integration scheme for socially-compliant robot navigation and then propose a human-centered benchmarking framework. For the former, we integrate one 3D lidar, one 2D lidar, and four RGB-D cameras for robot exterior perception. The software system is entirely based on the Robot Operating System (ROS) with high modularity and fully deployed to the embedded hardware-based edge while running at a rate that exceeds the release frequency of sensor data. For the latter, we propose a new human-centered performance evaluation metric that can be used to measure SC quickly and efficiently. The values of this metric correlate with the results of the Godspeed questionnaire, which is believed to be a golden standard approach for SC measurements. Together with other commonly used metrics, we benchmark two open-source socially-compliant robot navigation methods, in an end-to-end manner. We clarify all aspects of the benchmarking to ensure the reproducibility of the experiments. We also show that the proposed new metric can provide further justification for the selection of numerical metrics (objective) from a human perspective (subjective).
UltraBot: Autonomous Mobile Robot for Indoor UV-C Disinfection
Aug 22, 2021
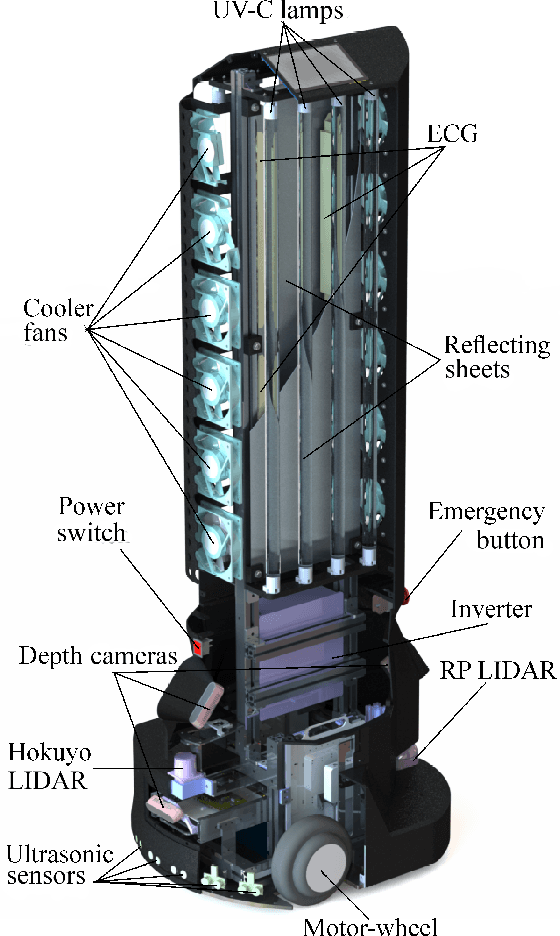
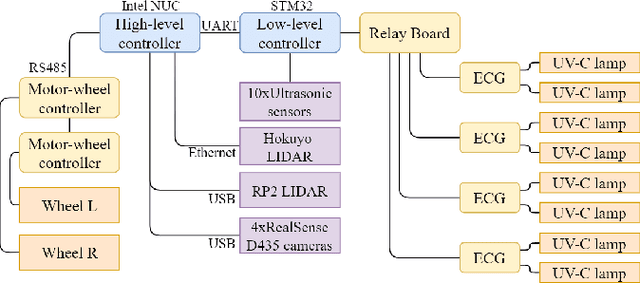
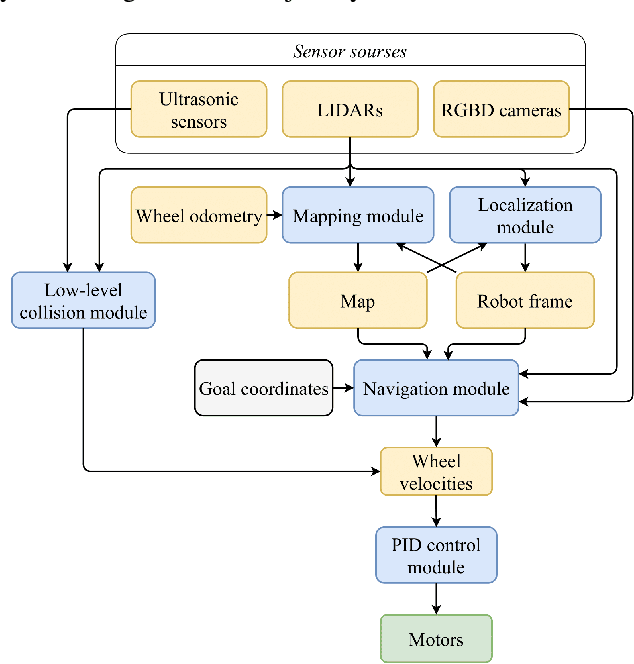
The paper focuses on the development of the autonomous robot UltraBot to reduce COVID-19 transmission and other harmful bacteria and viruses. The motivation behind the research is to develop such a robot that is capable of performing disinfection tasks without the use of harmful sprays and chemicals that can leave residues, require airing the room afterward for a long time, and can cause the corrosion of the metal structures. UltraBot technology has the potential to offer the most optimal autonomous disinfection performance along with taking care of people, keeping them from getting under UV-C radiation. The paper highlights UltraBot's mechanical and electrical structures as well as low-level and high-level control systems. The conducted experiments demonstrate the effectiveness of the robot localization module and optimal trajectories for UV-C disinfection. The results of UV-C disinfection performance revealed a decrease of the total bacterial count (TBC) by 94% on the distance of 2.8 meters from the robot after 10 minutes of UV-C irradiation.
MobileCharger: an Autonomous Mobile Robot with Inverted Delta Actuator for Robust and Safe Robot Charging
Jul 23, 2021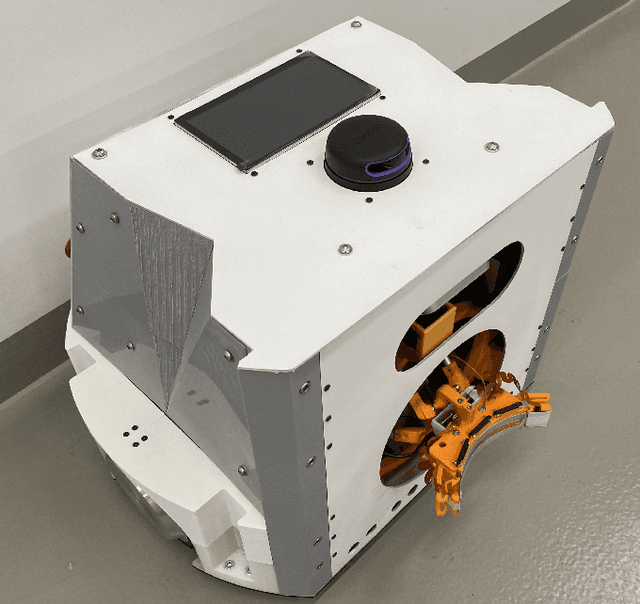
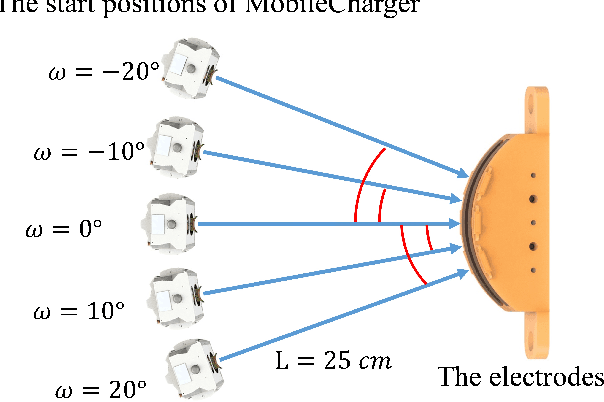
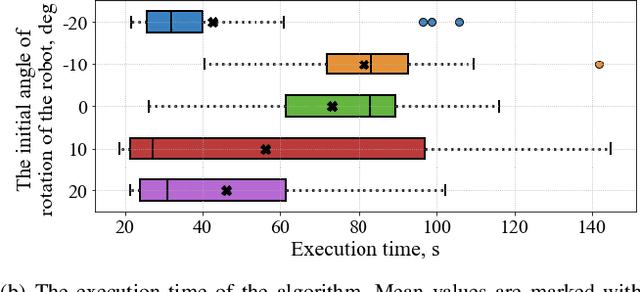
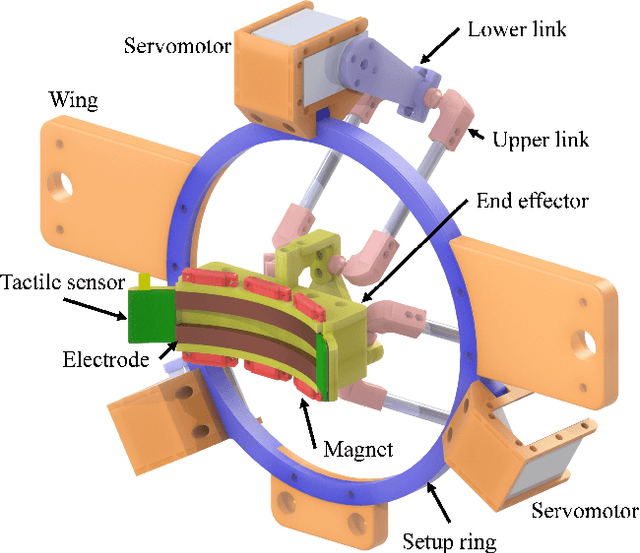
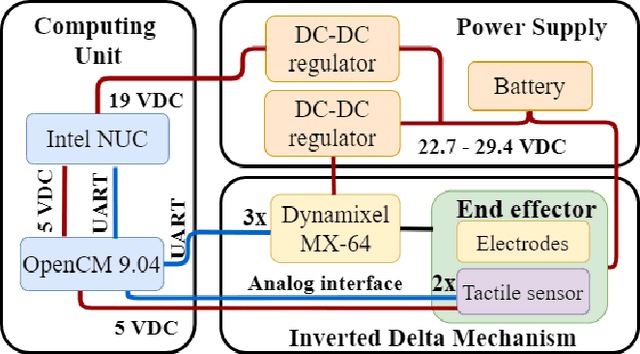
MobileCharger is a novel mobile charging robot with an Inverted Delta actuator for safe and robust energy transfer between two mobile robots. The RGB-D camera-based computer vision system allows to detect the electrodes on the target mobile robot using a convolutional neural network (CNN). The embedded high-fidelity tactile sensors are applied to estimate the misalignment between the electrodes on the charger mechanism and the electrodes on the main robot using CNN based on pressure data on the contact surfaces. Thus, the developed vision-tactile perception system allows precise positioning of the end effector of the actuator and ensures a reliable connection between the electrodes of the two robots. The experimental results showed high average precision (84.2%) for electrode detection using CNN. The percentage of successful trials of the CNN-based electrode search algorithm reached 83% and the average execution time accounted for 60 s. MobileCharger could introduce a new level of charging systems and increase the prevalence of autonomous mobile robots.
DeltaCharger: Charging Robot with Inverted Delta Mechanism and CNN-driven High Fidelity Tactile Perception for Precise 3D Positioning
Jul 22, 2021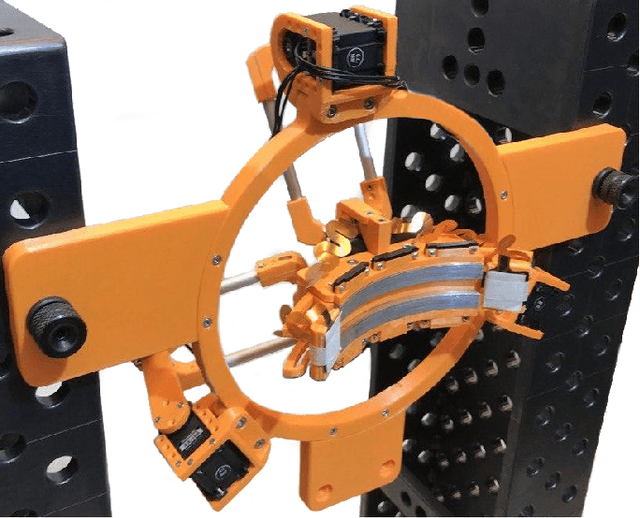
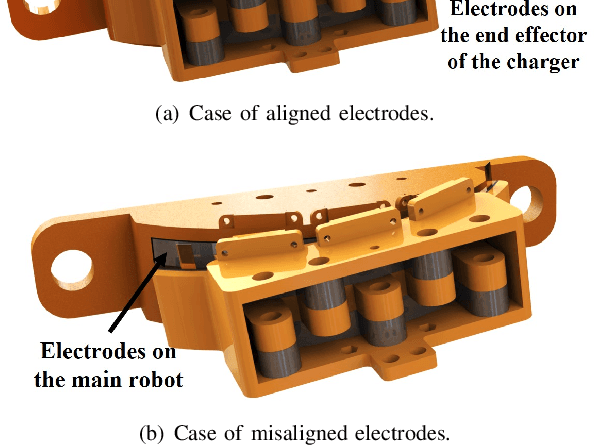
DeltaCharger is a novel charging robot with an Inverted Delta structure for 3D positioning of electrodes to achieve robust and safe transferring energy between two mobile robots. The embedded high-fidelity tactile sensors allow to estimate the angular, vertical and horizontal misalignments between electrodes on the charger mechanism and electrodes on the target robot using pressure data on the contact surfaces. This is crucial for preventing a short circuit. In this paper, the mechanism of the developed prototype and evaluation study of different machine learning models for misalignment prediction are presented. The experimental results showed that the proposed system can measure the angle, vertical and horizontal values of misalignment from pressure data with an accuracy of 95.46%, 98.2%, and 86.9%, respectively, using a Convolutional Neural Network (CNN). DeltaCharger can potentially bring a new level of charging systems and improve the prevalence of mobile autonomous robots.