 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCNN-based Omnidirectional Object Detection for HermesBot Autonomous Delivery Robot with Preliminary Frame Classification
Oct 22, 2021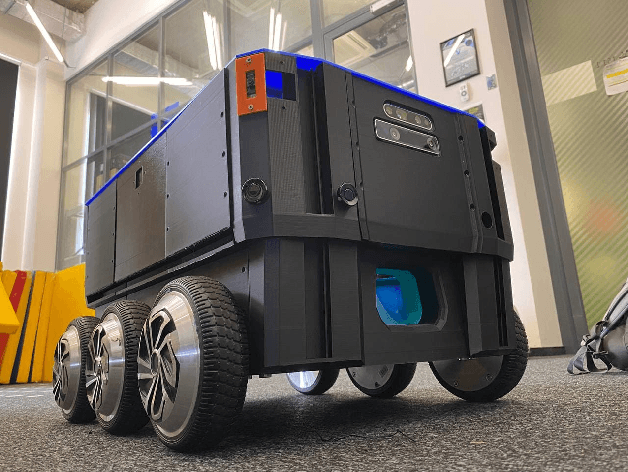
Mobile autonomous robots include numerous sensors for environment perception. Cameras are an essential tool for robot's localization, navigation, and obstacle avoidance. To process a large flow of data from the sensors, it is necessary to optimize algorithms, or to utilize substantial computational power. In our work, we propose an algorithm for optimizing a neural network for object detection using preliminary binary frame classification. An autonomous outdoor mobile robot with 6 rolling-shutter cameras on the perimeter providing a 360-degree field of view was used as the experimental setup. The obtained experimental results revealed that the proposed optimization accelerates the inference time of the neural network in the cases with up to 5 out of 6 cameras containing target objects.
UltraBot: Autonomous Mobile Robot for Indoor UV-C Disinfection with Non-trivial Shape of Disinfection Zone
Aug 22, 2021
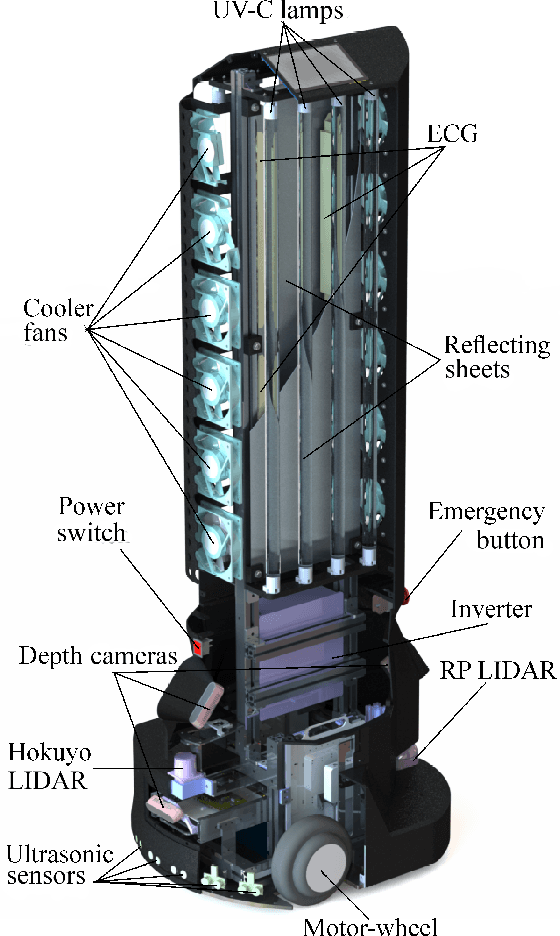
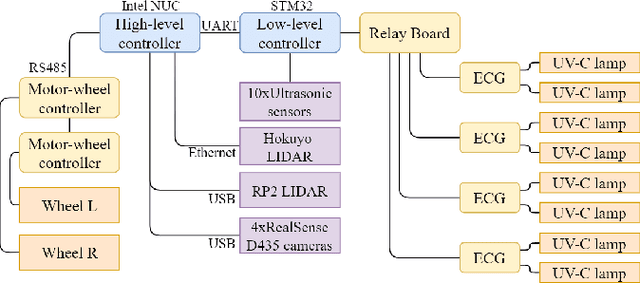
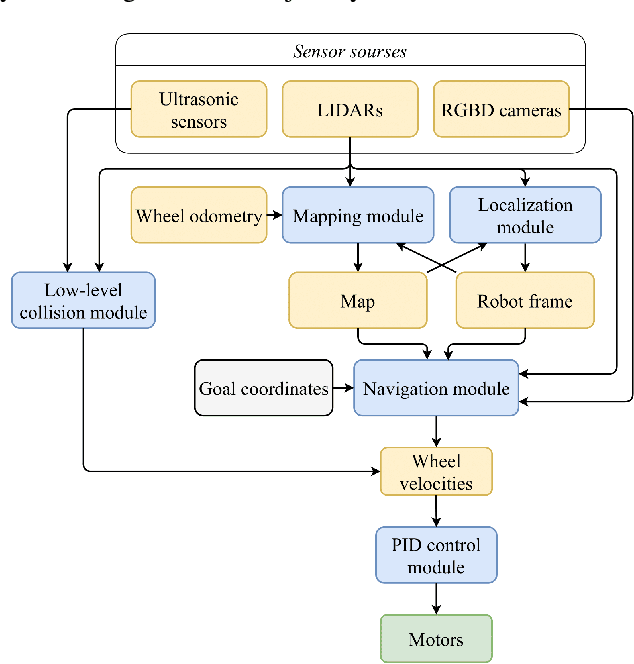
The paper focuses on the development of an autonomous disinfection robot UltraBot to reduce COVID-19 transmission along with other harmful bacteria and viruses. The motivation behind the research is to develop such a robot that is capable of performing disinfection tasks without the use of harmful sprays and chemicals that can leave residues and require airing the room afterward for a long time. UltraBot technology has the potential to offer the most optimal autonomous disinfection performance along with taking care of people, keeping them from getting under the UV-C radiation. The paper highlights UltraBot's mechanical and electrical design as well as disinfection performance. The conducted experiments demonstrate the effectiveness of robot disinfection ability and actual disinfection area per each side with UV-C lamp array. The disinfection effectiveness results show actual performance for the multi-pass technique that provides 1-log reduction with combined direct UV-C exposure and ozone-based air purification after two robot passes at a speed of 0.14 m/s. This technique has the same performance as ten minutes static disinfection. Finally, we have calculated the non-trivial form of the robot disinfection zone by two consecutive experiment to produce optimal path planning and to provide full disinfection in selected areas.
UltraBot: Autonomous Mobile Robot for Indoor UV-C Disinfection
Aug 22, 2021The paper focuses on the development of the autonomous robot UltraBot to reduce COVID-19 transmission and other harmful bacteria and viruses. The motivation behind the research is to develop such a robot that is capable of performing disinfection tasks without the use of harmful sprays and chemicals that can leave residues, require airing the room afterward for a long time, and can cause the corrosion of the metal structures. UltraBot technology has the potential to offer the most optimal autonomous disinfection performance along with taking care of people, keeping them from getting under UV-C radiation. The paper highlights UltraBot's mechanical and electrical structures as well as low-level and high-level control systems. The conducted experiments demonstrate the effectiveness of the robot localization module and optimal trajectories for UV-C disinfection. The results of UV-C disinfection performance revealed a decrease of the total bacterial count (TBC) by 94% on the distance of 2.8 meters from the robot after 10 minutes of UV-C irradiation.