 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoftware-hardware Integration and Human-centered Benchmarking for Socially-compliant Robot Navigation
Oct 27, 2022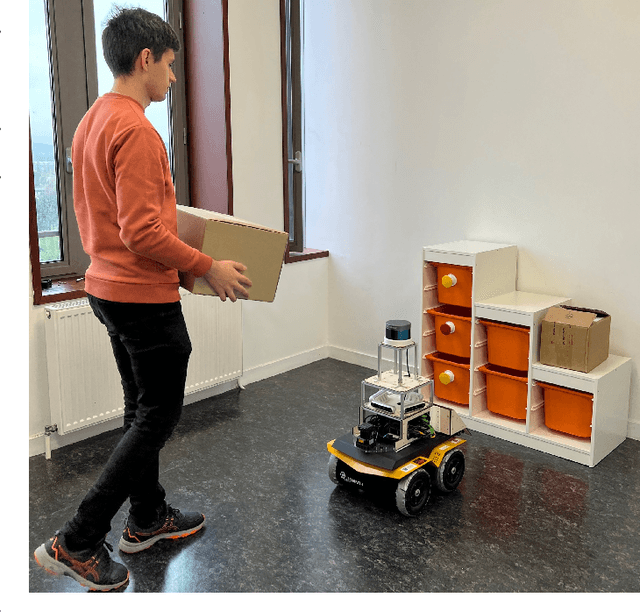
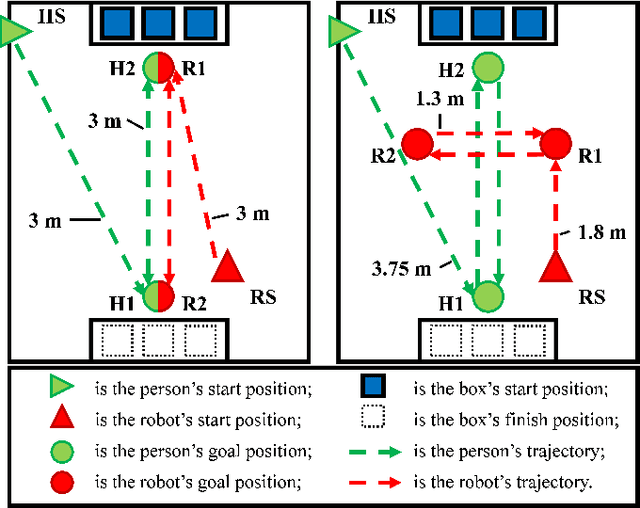

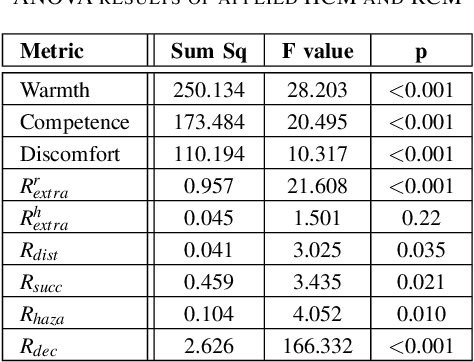
The social compatibility (SC) is one of the most important parameters for service robots. It characterises the interaction quality between a robot and a human. In this paper, we first introduce an open-source software-hardware integration scheme for socially-compliant robot navigation and then propose a human-centered benchmarking framework. For the former, we integrate one 3D lidar, one 2D lidar, and four RGB-D cameras for robot exterior perception. The software system is entirely based on the Robot Operating System (ROS) with high modularity and fully deployed to the embedded hardware-based edge while running at a rate that exceeds the release frequency of sensor data. For the latter, we propose a new human-centered performance evaluation metric that can be used to measure SC quickly and efficiently. The values of this metric correlate with the results of the Godspeed questionnaire, which is believed to be a golden standard approach for SC measurements. Together with other commonly used metrics, we benchmark two open-source socially-compliant robot navigation methods, in an end-to-end manner. We clarify all aspects of the benchmarking to ensure the reproducibility of the experiments. We also show that the proposed new metric can provide further justification for the selection of numerical metrics (objective) from a human perspective (subjective).
An Ontology to Support Collective Intelligence in Decentralised Multi-Robot Systems
May 31, 2018



In most multi-robot systems, conditions of the floor, battery and mechanical parts are important and impact cost-efficiency. The costs are generally interpreted through performance times. The relation between performance times andthese factors are not directly derivable, though, performance time has a direct correlation with discharge of batteries. Inroute planning, travel time of an edge is the performance time and may be required to be estimated for multiple times.These estimated travel times are different than heuristics costs as they depict the real states which are impossible toknow from heuristics. This facilitates path planning algorithms to choose the edges with least real travel times or coststo form the path. Nevertheless, a good estimation is dependent on historical data which are close in time. But, there aresituations when all the travel times for one or more edge(s) are not available for the entire duration of operation of theMRS to an individual robot. Then, it is imperative for that robot to gather the necessary travel times from others inthe system as a reference observation. The mechanism of information sharing between one robot to others in the systemhas been devised in a form of a common ontology-based knowledge. This ontology helps to fetch and share informationforming a collective knowledge base facilitating a comprehensive control and planning for the system. This greatly helpsthe MR to estimate travel times more accurately and precisely. Also, accurate estimation affects route planning to bemore precise with reduced cost. The total cost of paths generated through the travel times estimated through sharingis 40% less on average than that of paths generated through travel times without sharing.