 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRS-DFM: A Remote Sensing Distributed Foundation Model for Diverse Downstream Tasks
Jun 11, 2024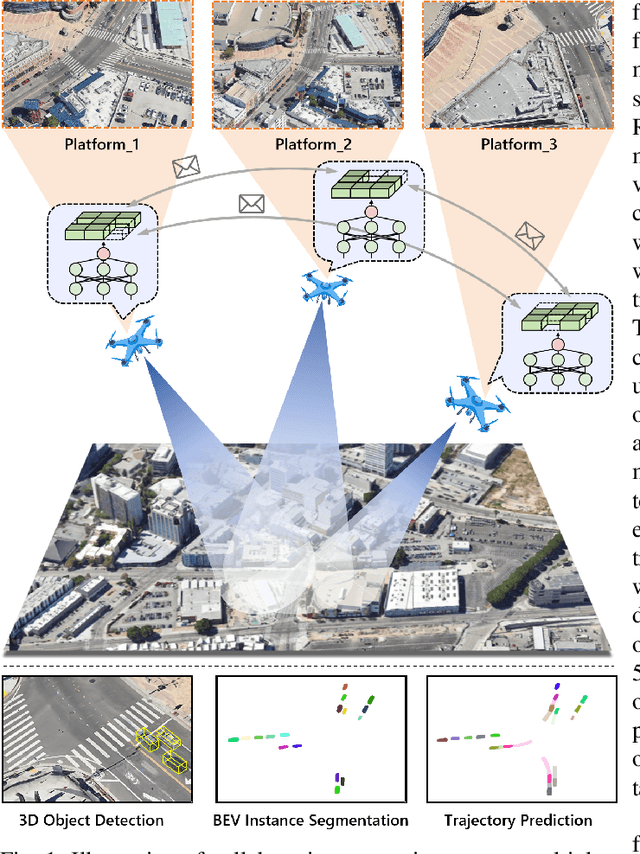
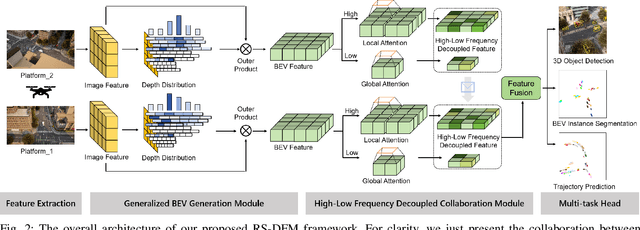
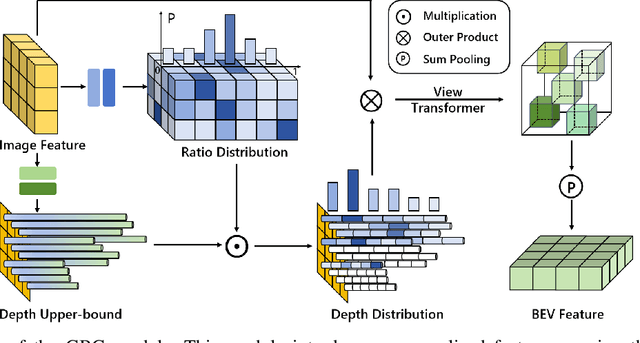
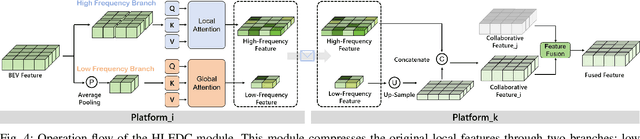
Remote sensing lightweight foundation models have achieved notable success in online perception within remote sensing. However, their capabilities are restricted to performing online inference solely based on their own observations and models, thus lacking a comprehensive understanding of large-scale remote sensing scenarios. To overcome this limitation, we propose a Remote Sensing Distributed Foundation Model (RS-DFM) based on generalized information mapping and interaction. This model can realize online collaborative perception across multiple platforms and various downstream tasks by mapping observations into a unified space and implementing a task-agnostic information interaction strategy. Specifically, we leverage the ground-based geometric prior of remote sensing oblique observations to transform the feature mapping from absolute depth estimation to relative depth estimation, thereby enhancing the model's ability to extract generalized features across diverse heights and perspectives. Additionally, we present a dual-branch information compression module to decouple high-frequency and low-frequency feature information, achieving feature-level compression while preserving essential task-agnostic details. In support of our research, we create a multi-task simulation dataset named AirCo-MultiTasks for multi-UAV collaborative observation. We also conduct extensive experiments, including 3D object detection, instance segmentation, and trajectory prediction. The numerous results demonstrate that our RS-DFM achieves state-of-the-art performance across various downstream tasks.
UCDNet: Multi-UAV Collaborative 3D Object Detection Network by Reliable Feature Mapping
Jun 07, 2024Multi-UAV collaborative 3D object detection can perceive and comprehend complex environments by integrating complementary information, with applications encompassing traffic monitoring, delivery services and agricultural management. However, the extremely broad observations in aerial remote sensing and significant perspective differences across multiple UAVs make it challenging to achieve precise and consistent feature mapping from 2D images to 3D space in multi-UAV collaborative 3D object detection paradigm. To address the problem, we propose an unparalleled camera-based multi-UAV collaborative 3D object detection paradigm called UCDNet. Specifically, the depth information from the UAVs to the ground is explicitly utilized as a strong prior to provide a reference for more accurate and generalizable feature mapping. Additionally, we design a homologous points geometric consistency loss as an auxiliary self-supervision, which directly influences the feature mapping module, thereby strengthening the global consistency of multi-view perception. Experiments on AeroCollab3D and CoPerception-UAVs datasets show our method increases 4.7% and 10% mAP respectively compared to the baseline, which demonstrates the superiority of UCDNet.
Drones Help Drones: A Collaborative Framework for Multi-Drone Object Trajectory Prediction and Beyond
May 23, 2024



Collaborative trajectory prediction can comprehensively forecast the future motion of objects through multi-view complementary information. However, it encounters two main challenges in multi-drone collaboration settings. The expansive aerial observations make it difficult to generate precise Bird's Eye View (BEV) representations. Besides, excessive interactions can not meet real-time prediction requirements within the constrained drone-based communication bandwidth. To address these problems, we propose a novel framework named "Drones Help Drones" (DHD). Firstly, we incorporate the ground priors provided by the drone's inclined observation to estimate the distance between objects and drones, leading to more precise BEV generation. Secondly, we design a selective mechanism based on the local feature discrepancy to prioritize the critical information contributing to prediction tasks during inter-drone interactions. Additionally, we create the first dataset for multi-drone collaborative prediction, named "Air-Co-Pred", and conduct quantitative and qualitative experiments to validate the effectiveness of our DHD framework.The results demonstrate that compared to state-of-the-art approaches, DHD reduces position deviation in BEV representations by over 20% and requires only a quarter of the transmission ratio for interactions while achieving comparable prediction performance. Moreover, DHD also shows promising generalization to the collaborative 3D object detection in CoPerception-UAVs.
RingMo-lite: A Remote Sensing Multi-task Lightweight Network with CNN-Transformer Hybrid Framework
Sep 16, 2023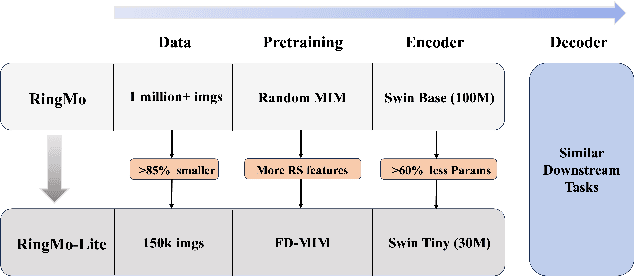
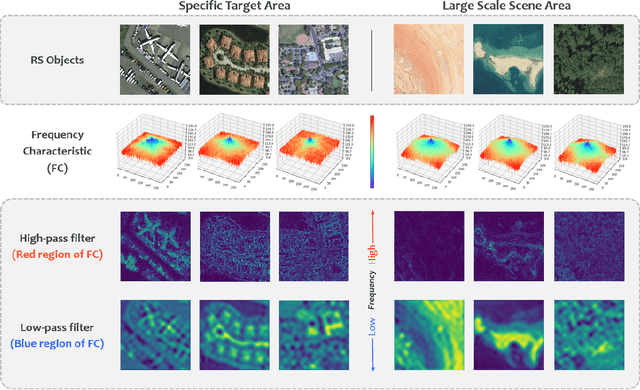
In recent years, remote sensing (RS) vision foundation models such as RingMo have emerged and achieved excellent performance in various downstream tasks. However, the high demand for computing resources limits the application of these models on edge devices. It is necessary to design a more lightweight foundation model to support on-orbit RS image interpretation. Existing methods face challenges in achieving lightweight solutions while retaining generalization in RS image interpretation. This is due to the complex high and low-frequency spectral components in RS images, which make traditional single CNN or Vision Transformer methods unsuitable for the task. Therefore, this paper proposes RingMo-lite, an RS multi-task lightweight network with a CNN-Transformer hybrid framework, which effectively exploits the frequency-domain properties of RS to optimize the interpretation process. It is combined by the Transformer module as a low-pass filter to extract global features of RS images through a dual-branch structure, and the CNN module as a stacked high-pass filter to extract fine-grained details effectively. Furthermore, in the pretraining stage, the designed frequency-domain masked image modeling (FD-MIM) combines each image patch's high-frequency and low-frequency characteristics, effectively capturing the latent feature representation in RS data. As shown in Fig. 1, compared with RingMo, the proposed RingMo-lite reduces the parameters over 60% in various RS image interpretation tasks, the average accuracy drops by less than 2% in most of the scenes and achieves SOTA performance compared to models of the similar size. In addition, our work will be integrated into the MindSpore computing platform in the near future.
DCP-Net: A Distributed Collaborative Perception Network for Remote Sensing Semantic Segmentation
Sep 05, 2023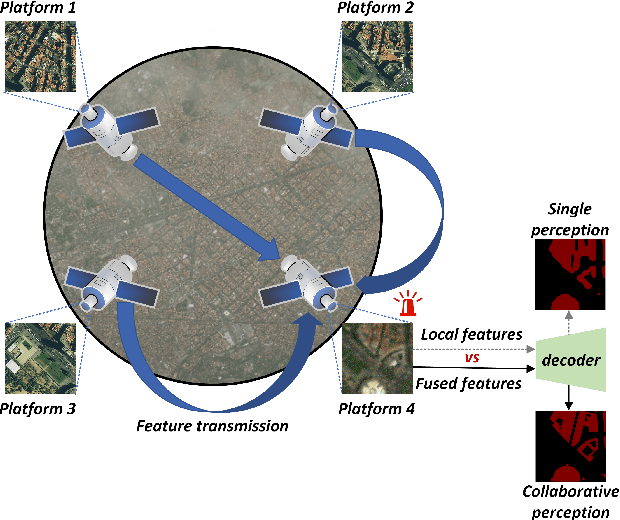
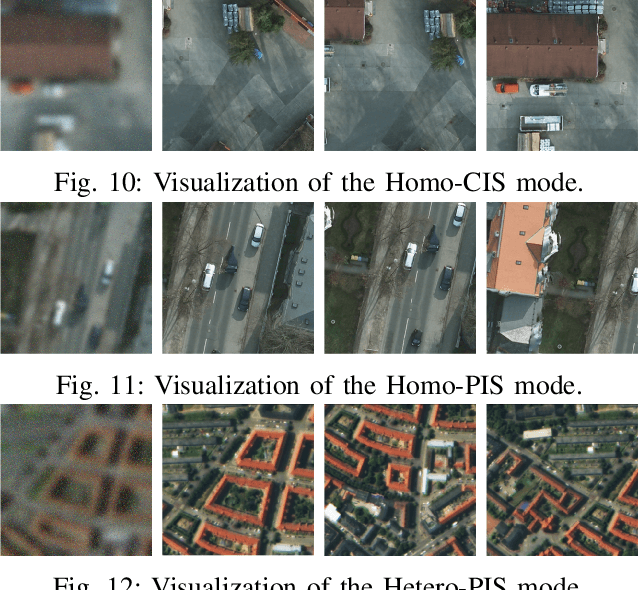
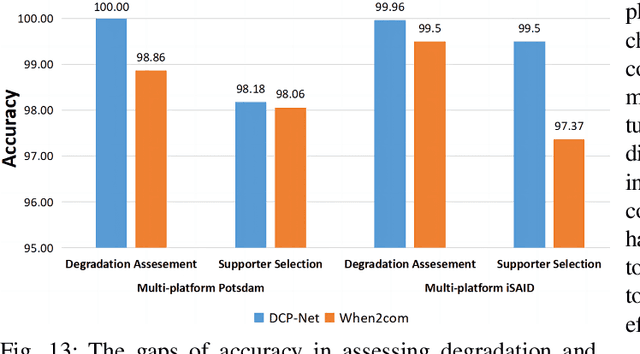
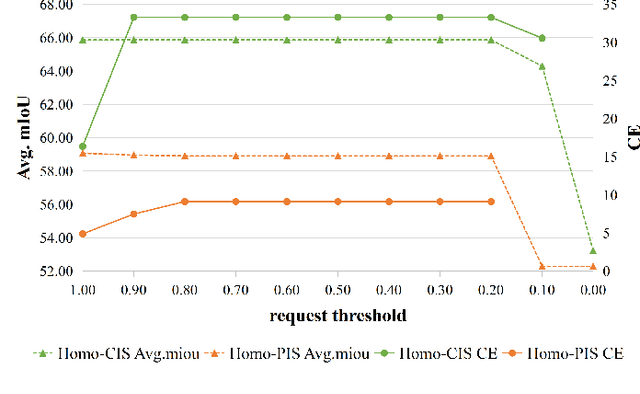
Onboard intelligent processing is widely applied in emergency tasks in the field of remote sensing. However, it is predominantly confined to an individual platform with a limited observation range as well as susceptibility to interference, resulting in limited accuracy. Considering the current state of multi-platform collaborative observation, this article innovatively presents a distributed collaborative perception network called DCP-Net. Firstly, the proposed DCP-Net helps members to enhance perception performance by integrating features from other platforms. Secondly, a self-mutual information match module is proposed to identify collaboration opportunities and select suitable partners, prioritizing critical collaborative features and reducing redundant transmission cost. Thirdly, a related feature fusion module is designed to address the misalignment between local and collaborative features, improving the quality of fused features for the downstream task. We conduct extensive experiments and visualization analyses using three semantic segmentation datasets, including Potsdam, iSAID and DFC23. The results demonstrate that DCP-Net outperforms the existing methods comprehensively, improving mIoU by 2.61%~16.89% at the highest collaboration efficiency, which promotes the performance to a state-of-the-art level.