 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeERNIE 5.0 Technical Report
Feb 04, 2026In this report, we introduce ERNIE 5.0, a natively autoregressive foundation model desinged for unified multimodal understanding and generation across text, image, video, and audio. All modalities are trained from scratch under a unified next-group-of-tokens prediction objective, based on an ultra-sparse mixture-of-experts (MoE) architecture with modality-agnostic expert routing. To address practical challenges in large-scale deployment under diverse resource constraints, ERNIE 5.0 adopts a novel elastic training paradigm. Within a single pre-training run, the model learns a family of sub-models with varying depths, expert capacities, and routing sparsity, enabling flexible trade-offs among performance, model size, and inference latency in memory- or time-constrained scenarios. Moreover, we systematically address the challenges of scaling reinforcement learning to unified foundation models, thereby guaranteeing efficient and stable post-training under ultra-sparse MoE architectures and diverse multimodal settings. Extensive experiments demonstrate that ERNIE 5.0 achieves strong and balanced performance across multiple modalities. To the best of our knowledge, among publicly disclosed models, ERNIE 5.0 represents the first production-scale realization of a trillion-parameter unified autoregressive model that supports both multimodal understanding and generation. To facilitate further research, we present detailed visualizations of modality-agnostic expert routing in the unified model, alongside comprehensive empirical analysis of elastic training, aiming to offer profound insights to the community.
RS-DFM: A Remote Sensing Distributed Foundation Model for Diverse Downstream Tasks
Jun 11, 2024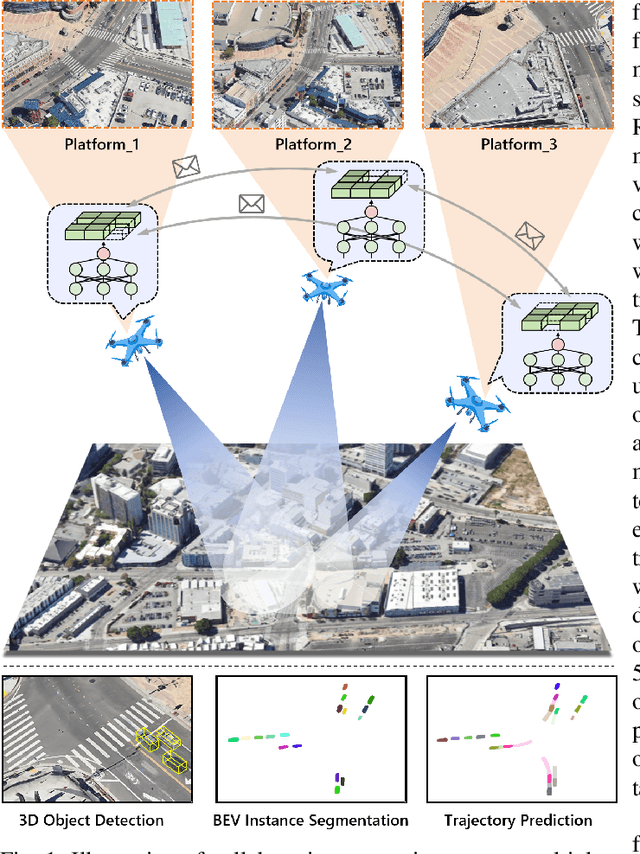
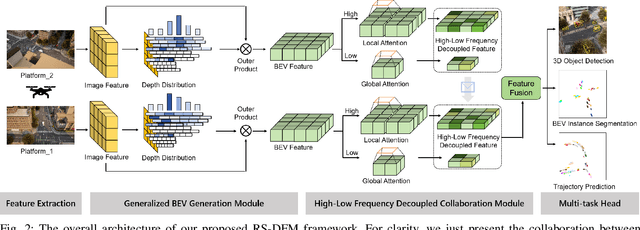
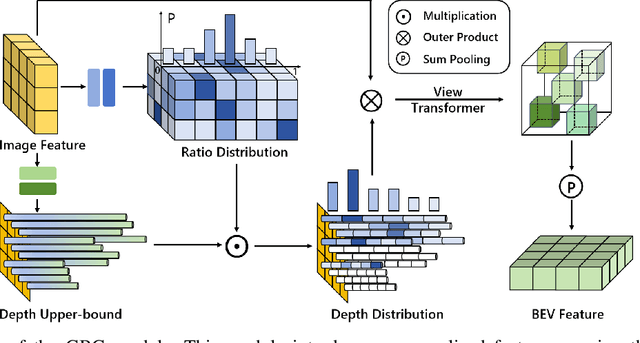
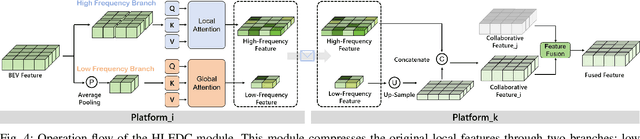
Remote sensing lightweight foundation models have achieved notable success in online perception within remote sensing. However, their capabilities are restricted to performing online inference solely based on their own observations and models, thus lacking a comprehensive understanding of large-scale remote sensing scenarios. To overcome this limitation, we propose a Remote Sensing Distributed Foundation Model (RS-DFM) based on generalized information mapping and interaction. This model can realize online collaborative perception across multiple platforms and various downstream tasks by mapping observations into a unified space and implementing a task-agnostic information interaction strategy. Specifically, we leverage the ground-based geometric prior of remote sensing oblique observations to transform the feature mapping from absolute depth estimation to relative depth estimation, thereby enhancing the model's ability to extract generalized features across diverse heights and perspectives. Additionally, we present a dual-branch information compression module to decouple high-frequency and low-frequency feature information, achieving feature-level compression while preserving essential task-agnostic details. In support of our research, we create a multi-task simulation dataset named AirCo-MultiTasks for multi-UAV collaborative observation. We also conduct extensive experiments, including 3D object detection, instance segmentation, and trajectory prediction. The numerous results demonstrate that our RS-DFM achieves state-of-the-art performance across various downstream tasks.
Joint Node Selection and Resource Allocation Optimization for Cooperative Sensing with a Shared Wireless Backhaul
May 27, 2024



In this paper, we consider a cooperative sensing framework in the context of future multi-functional network with both communication and sensing ability, where one base station (BS) serves as a sensing transmitter and several nearby BSs serve as sensing receivers. Each receiver receives the sensing signal reflected by the target and communicates with the fusion center (FC) through a wireless multiple access channel (MAC) for cooperative target localization. To improve the localization performance, we present a hybrid information-signal domain cooperative sensing (HISDCS) design, where each sensing receiver transmits both the estimated time delay/effective reflecting coefficient and the received sensing signal sampled around the estimated time delay to the FC. Then, we propose to minimize the number of channel uses by utilizing an efficient Karhunen-Lo\'eve transformation (KLT) encoding scheme for signal quantization and proper node selection, under the Cram\'er-Rao lower bound (CRLB) constraint and the capacity limits of MAC. A novel matrix-inequality constrained successive convex approximation (MCSCA) algorithm is proposed to optimize the wireless backhaul resource allocation, together with a greedy strategy for node selection. Despite the high non-convexness of the considered problem, we prove that the proposed MCSCA algorithm is able to converge to the set of Karush-Kuhn-Tucker (KKT) solutions of a relaxed problem obtained by relaxing the discrete variables. Besides, a low-complexity quantization bit reallocation algorithm is designed, which does not perform explicit node selection, and is able to harvest most of the performance gain brought by HISDCS. Finally, numerical simulations are presented to show that the proposed HISDCS design is able to significantly outperform the baseline schemes.
Drones Help Drones: A Collaborative Framework for Multi-Drone Object Trajectory Prediction and Beyond
May 23, 2024



Collaborative trajectory prediction can comprehensively forecast the future motion of objects through multi-view complementary information. However, it encounters two main challenges in multi-drone collaboration settings. The expansive aerial observations make it difficult to generate precise Bird's Eye View (BEV) representations. Besides, excessive interactions can not meet real-time prediction requirements within the constrained drone-based communication bandwidth. To address these problems, we propose a novel framework named "Drones Help Drones" (DHD). Firstly, we incorporate the ground priors provided by the drone's inclined observation to estimate the distance between objects and drones, leading to more precise BEV generation. Secondly, we design a selective mechanism based on the local feature discrepancy to prioritize the critical information contributing to prediction tasks during inter-drone interactions. Additionally, we create the first dataset for multi-drone collaborative prediction, named "Air-Co-Pred", and conduct quantitative and qualitative experiments to validate the effectiveness of our DHD framework.The results demonstrate that compared to state-of-the-art approaches, DHD reduces position deviation in BEV representations by over 20% and requires only a quarter of the transmission ratio for interactions while achieving comparable prediction performance. Moreover, DHD also shows promising generalization to the collaborative 3D object detection in CoPerception-UAVs.
Federated Extra-Trees with Privacy Preserving
Feb 18, 2020



It is commonly observed that the data are scattered everywhere and difficult to be centralized. The data privacy and security also become a sensitive topic. The laws and regulations such as the European Union's General Data Protection Regulation (GDPR) are designed to protect the public's data privacy. However, machine learning requires a large amount of data for better performance, and the current circumstances put deploying real-life AI applications in an extremely difficult situation. To tackle these challenges, in this paper we propose a novel privacy-preserving federated machine learning model, named Federated Extra-Trees, which applies local differential privacy in the federated trees model. A secure multi-institutional machine learning system was developed to provide superior performance by processing the modeling jointly on different clients without exchanging any raw data. We have validated the accuracy of our work by conducting extensive experiments on public datasets and the efficiency and robustness were also verified by simulating the real-world scenarios. Overall, we presented an extensible, scalable and practical solution to handle the data island problem.