 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative AI for Autonomous Driving: Frontiers and Opportunities
May 13, 2025Generative Artificial Intelligence (GenAI) constitutes a transformative technological wave that reconfigures industries through its unparalleled capabilities for content creation, reasoning, planning, and multimodal understanding. This revolutionary force offers the most promising path yet toward solving one of engineering's grandest challenges: achieving reliable, fully autonomous driving, particularly the pursuit of Level 5 autonomy. This survey delivers a comprehensive and critical synthesis of the emerging role of GenAI across the autonomous driving stack. We begin by distilling the principles and trade-offs of modern generative modeling, encompassing VAEs, GANs, Diffusion Models, and Large Language Models (LLMs). We then map their frontier applications in image, LiDAR, trajectory, occupancy, video generation as well as LLM-guided reasoning and decision making. We categorize practical applications, such as synthetic data workflows, end-to-end driving strategies, high-fidelity digital twin systems, smart transportation networks, and cross-domain transfer to embodied AI. We identify key obstacles and possibilities such as comprehensive generalization across rare cases, evaluation and safety checks, budget-limited implementation, regulatory compliance, ethical concerns, and environmental effects, while proposing research plans across theoretical assurances, trust metrics, transport integration, and socio-technical influence. By unifying these threads, the survey provides a forward-looking reference for researchers, engineers, and policymakers navigating the convergence of generative AI and advanced autonomous mobility. An actively maintained repository of cited works is available at https://github.com/taco-group/GenAI4AD.
Discovering the Precursors of Traffic Breakdowns Using Spatiotemporal Graph Attribution Networks
Apr 23, 2025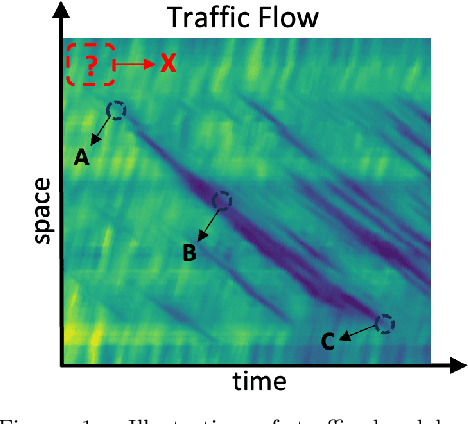
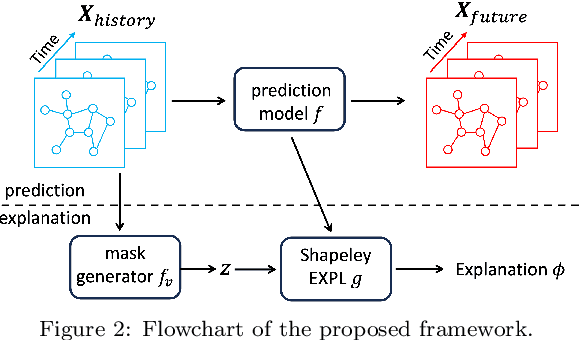

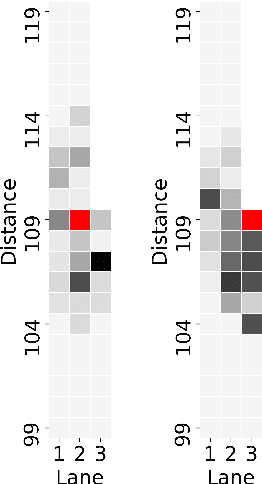
Understanding and predicting the precursors of traffic breakdowns is critical for improving road safety and traffic flow management. This paper presents a novel approach combining spatiotemporal graph neural networks (ST-GNNs) with Shapley values to identify and interpret traffic breakdown precursors. By extending Shapley explanation methods to a spatiotemporal setting, our proposed method bridges the gap between black-box neural network predictions and interpretable causes. We demonstrate the method on the Interstate-24 data, and identify that road topology and abrupt braking are major factors that lead to traffic breakdowns.
SafeAug: Safety-Critical Driving Data Augmentation from Naturalistic Datasets
Jan 03, 2025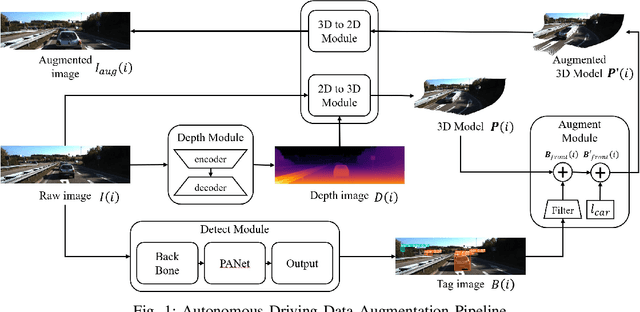
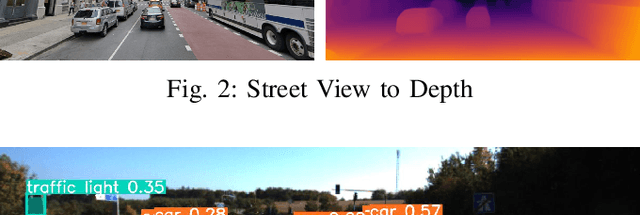
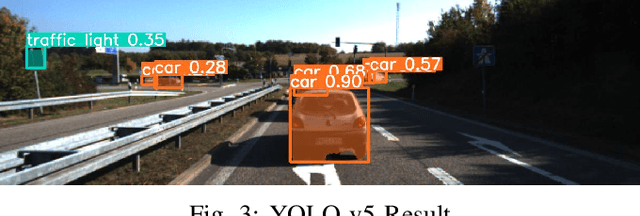

Safety-critical driving data is crucial for developing safe and trustworthy self-driving algorithms. Due to the scarcity of safety-critical data in naturalistic datasets, current approaches primarily utilize simulated or artificially generated images. However, there remains a gap in authenticity between these generated images and naturalistic ones. We propose a novel framework to augment the safety-critical driving data from the naturalistic dataset to address this issue. In this framework, we first detect vehicles using YOLOv5, followed by depth estimation and 3D transformation to simulate vehicle proximity and critical driving scenarios better. This allows for targeted modification of vehicle dynamics data to reflect potentially hazardous situations. Compared to the simulated or artificially generated data, our augmentation methods can generate safety-critical driving data with minimal compromise on image authenticity. Experiments using KITTI datasets demonstrate that a downstream self-driving algorithm trained on this augmented dataset performs superiorly compared to the baselines, which include SMOGN and importance sampling.
diffIRM: A Diffusion-Augmented Invariant Risk Minimization Framework for Spatiotemporal Prediction over Graphs
Dec 31, 2024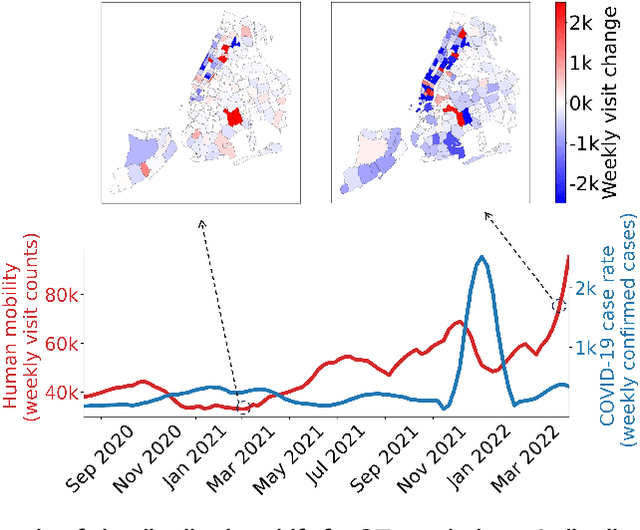
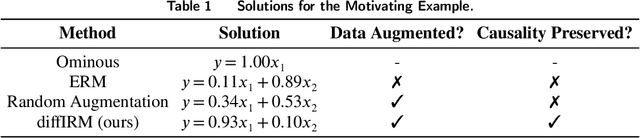
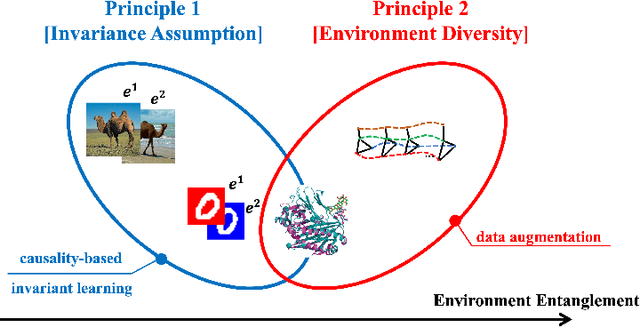
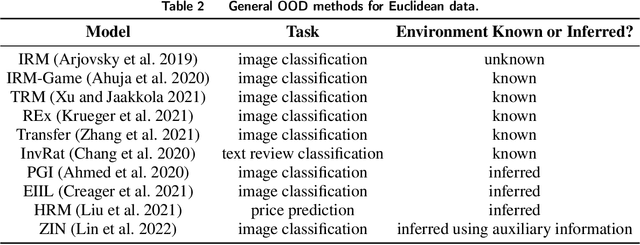
Spatiotemporal prediction over graphs (STPG) is challenging, because real-world data suffers from the Out-of-Distribution (OOD) generalization problem, where test data follow different distributions from training ones. To address this issue, Invariant Risk Minimization (IRM) has emerged as a promising approach for learning invariant representations across different environments. However, IRM and its variants are originally designed for Euclidean data like images, and may not generalize well to graph-structure data such as spatiotemporal graphs due to spatial correlations in graphs. To overcome the challenge posed by graph-structure data, the existing graph OOD methods adhere to the principles of invariance existence, or environment diversity. However, there is little research that combines both principles in the STPG problem. A combination of the two is crucial for efficiently distinguishing between invariant features and spurious ones. In this study, we fill in this research gap and propose a diffusion-augmented invariant risk minimization (diffIRM) framework that combines these two principles for the STPG problem. Our diffIRM contains two processes: i) data augmentation and ii) invariant learning. In the data augmentation process, a causal mask generator identifies causal features and a graph-based diffusion model acts as an environment augmentor to generate augmented spatiotemporal graph data. In the invariant learning process, an invariance penalty is designed using the augmented data, and then serves as a regularizer for training the spatiotemporal prediction model. The real-world experiment uses three human mobility datasets, i.e. SafeGraph, PeMS04, and PeMS08. Our proposed diffIRM outperforms baselines.
Causal Adjacency Learning for Spatiotemporal Prediction Over Graphs
Nov 25, 2024



Spatiotemporal prediction over graphs (STPG) is crucial for transportation systems. In existing STPG models, an adjacency matrix is an important component that captures the relations among nodes over graphs. However, most studies calculate the adjacency matrix by directly memorizing the data, such as distance- and correlation-based matrices. These adjacency matrices do not consider potential pattern shift for the test data, and may result in suboptimal performance if the test data has a different distribution from the training one. This issue is known as the Out-of-Distribution generalization problem. To address this issue, in this paper we propose a Causal Adjacency Learning (CAL) method to discover causal relations over graphs. The learned causal adjacency matrix is evaluated on a downstream spatiotemporal prediction task using real-world graph data. Results demonstrate that our proposed adjacency matrix can capture the causal relations, and using our learned adjacency matrix can enhance prediction performance on the OOD test data, even though causal learning is not conducted in the downstream task.
DriveGenVLM: Real-world Video Generation for Vision Language Model based Autonomous Driving
Aug 29, 2024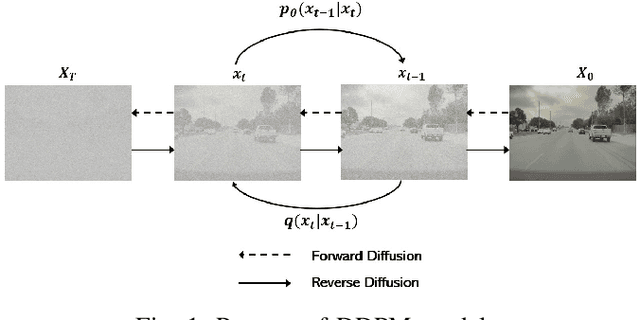
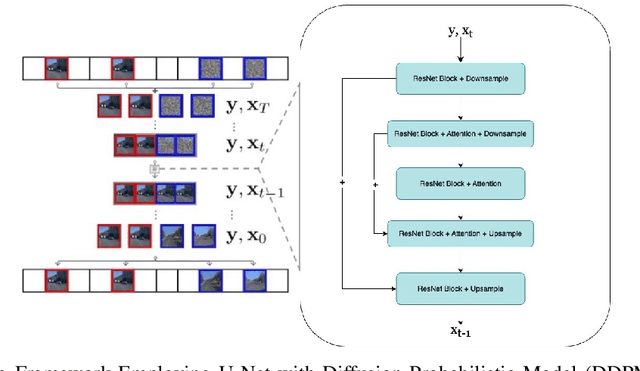
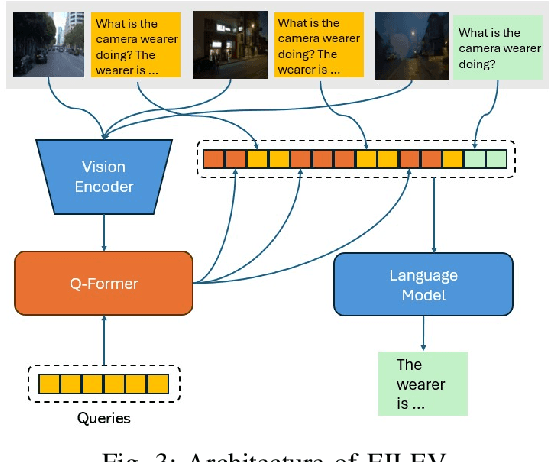
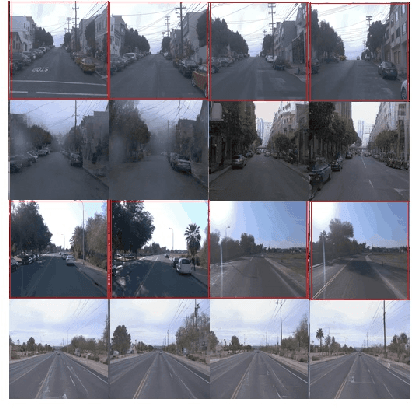
The advancement of autonomous driving technologies necessitates increasingly sophisticated methods for understanding and predicting real-world scenarios. Vision language models (VLMs) are emerging as revolutionary tools with significant potential to influence autonomous driving. In this paper, we propose the DriveGenVLM framework to generate driving videos and use VLMs to understand them. To achieve this, we employ a video generation framework grounded in denoising diffusion probabilistic models (DDPM) aimed at predicting real-world video sequences. We then explore the adequacy of our generated videos for use in VLMs by employing a pre-trained model known as Efficient In-context Learning on Egocentric Videos (EILEV). The diffusion model is trained with the Waymo open dataset and evaluated using the Fr\'echet Video Distance (FVD) score to ensure the quality and realism of the generated videos. Corresponding narrations are provided by EILEV for these generated videos, which may be beneficial in the autonomous driving domain. These narrations can enhance traffic scene understanding, aid in navigation, and improve planning capabilities. The integration of video generation with VLMs in the DriveGenVLM framework represents a significant step forward in leveraging advanced AI models to address complex challenges in autonomous driving.
Can LLMs Understand Social Norms in Autonomous Driving Games?
Aug 22, 2024



Social norm is defined as a shared standard of acceptable behavior in a society. The emergence of social norms fosters coordination among agents without any hard-coded rules, which is crucial for the large-scale deployment of AVs in an intelligent transportation system. This paper explores the application of LLMs in understanding and modeling social norms in autonomous driving games. We introduce LLMs into autonomous driving games as intelligent agents who make decisions according to text prompts. These agents are referred to as LLM-based agents. Our framework involves LLM-based agents playing Markov games in a multi-agent system (MAS), allowing us to investigate the emergence of social norms among individual agents. We aim to identify social norms by designing prompts and utilizing LLMs on textual information related to the environment setup and the observations of LLM-based agents. Using the OpenAI Chat API powered by GPT-4.0, we conduct experiments to simulate interactions and evaluate the performance of LLM-based agents in two driving scenarios: unsignalized intersection and highway platoon. The results show that LLM-based agents can handle dynamically changing environments in Markov games, and social norms evolve among LLM-based agents in both scenarios. In the intersection game, LLM-based agents tend to adopt a conservative driving policy when facing a potential car crash. The advantage of LLM-based agents in games lies in their strong operability and analyzability, which facilitate experimental design.
Physics-Informed Deep Learning For Traffic State Estimation: A Survey and the Outlook
Mar 03, 2023For its robust predictive power (compared to pure physics-based models) and sample-efficient training (compared to pure deep learning models), physics-informed deep learning (PIDL), a paradigm hybridizing physics-based models and deep neural networks (DNN), has been booming in science and engineering fields. One key challenge of applying PIDL to various domains and problems lies in the design of a computational graph that integrates physics and DNNs. In other words, how physics are encoded into DNNs and how the physics and data components are represented. In this paper, we provide a variety of architecture designs of PIDL computational graphs and how these structures are customized to traffic state estimation (TSE), a central problem in transportation engineering. When observation data, problem type, and goal vary, we demonstrate potential architectures of PIDL computational graphs and compare these variants using the same real-world dataset.
Quantifying Uncertainty In Traffic State Estimation Using Generative Adversarial Networks
Jun 19, 2022

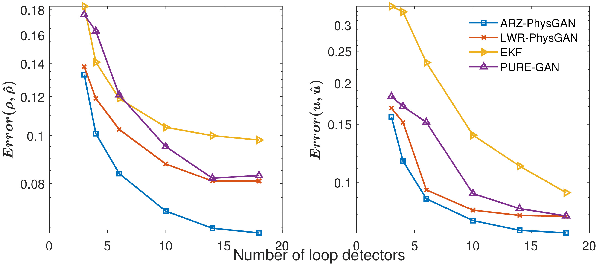

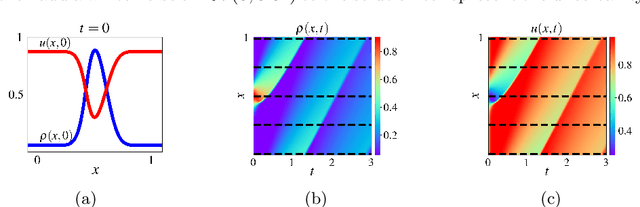
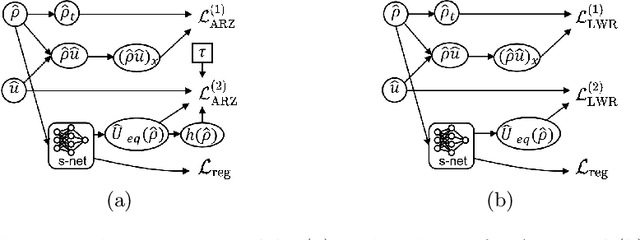
This paper aims to quantify uncertainty in traffic state estimation (TSE) using the generative adversarial network based physics-informed deep learning (PIDL). The uncertainty of the focus arises from fundamental diagrams, in other words, the mapping from traffic density to velocity. To quantify uncertainty for the TSE problem is to characterize the robustness of predicted traffic states. Since its inception, generative adversarial networks (GAN) have become a popular probabilistic machine learning framework. In this paper, we will inform the GAN based predictions using stochastic traffic flow models and develop a GAN based PIDL framework for TSE, named ``PhysGAN-TSE". By conducting experiments on a real-world dataset, the Next Generation SIMulation (NGSIM) dataset, this method is shown to be more robust for uncertainty quantification than the pure GAN model or pure traffic flow models. Two physics models, the Lighthill-Whitham-Richards (LWR) and the Aw-Rascle-Zhang (ARZ) models, are compared as the physics components for the PhysGAN, and results show that the ARZ-based PhysGAN achieves a better performance than the LWR-based one.
TrafficFlowGAN: Physics-informed Flow based Generative Adversarial Network for Uncertainty Quantification
Jun 19, 2022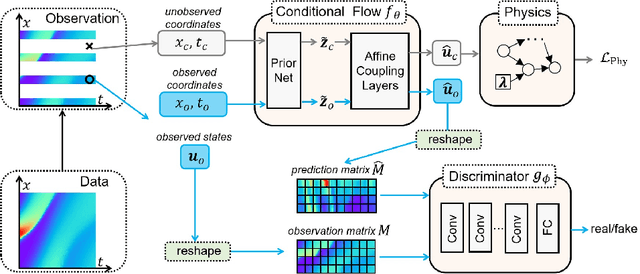
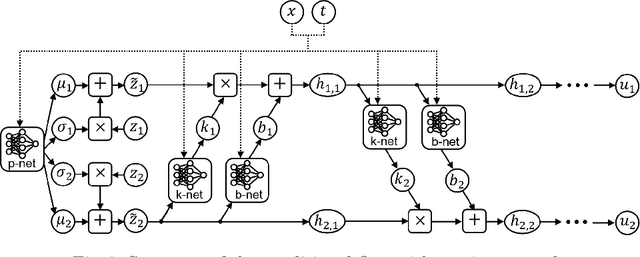
This paper proposes the TrafficFlowGAN, a physics-informed flow based generative adversarial network (GAN), for uncertainty quantification (UQ) of dynamical systems. TrafficFlowGAN adopts a normalizing flow model as the generator to explicitly estimate the data likelihood. This flow model is trained to maximize the data likelihood and to generate synthetic data that can fool a convolutional discriminator. We further regularize this training process using prior physics information, so-called physics-informed deep learning (PIDL). To the best of our knowledge, we are the first to propose an integration of flow, GAN and PIDL for the UQ problems. We take the traffic state estimation (TSE), which aims to estimate the traffic variables (e.g. traffic density and velocity) using partially observed data, as an example to demonstrate the performance of our proposed model. We conduct numerical experiments where the proposed model is applied to learn the solutions of stochastic differential equations. The results demonstrate the robustness and accuracy of the proposed model, together with the ability to learn a machine learning surrogate model. We also test it on a real-world dataset, the Next Generation SIMulation (NGSIM), to show that the proposed TrafficFlowGAN can outperform the baselines, including the pure flow model, the physics-informed flow model, and the flow based GAN model.