 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulating the Unseen: Crash Prediction Must Learn from What Did Not Happen
May 27, 2025Traffic safety science has long been hindered by a fundamental data paradox: the crashes we most wish to prevent are precisely those events we rarely observe. Existing crash-frequency models and surrogate safety metrics rely heavily on sparse, noisy, and under-reported records, while even sophisticated, high-fidelity simulations undersample the long-tailed situations that trigger catastrophic outcomes such as fatalities. We argue that the path to achieving Vision Zero, i.e., the complete elimination of traffic fatalities and severe injuries, requires a paradigm shift from traditional crash-only learning to a new form of counterfactual safety learning: reasoning not only about what happened, but also about the vast set of plausible yet perilous scenarios that could have happened under slightly different circumstances. To operationalize this shift, our proposed agenda bridges macro to micro. Guided by crash-rate priors, generative scene engines, diverse driver models, and causal learning, near-miss events are synthesized and explained. A crash-focused digital twin testbed links micro scenes to macro patterns, while a multi-objective validator ensures that simulations maintain statistical realism. This pipeline transforms sparse crash data into rich signals for crash prediction, enabling the stress-testing of vehicles, roads, and policies before deployment. By learning from crashes that almost happened, we can shift traffic safety from reactive forensics to proactive prevention, advancing Vision Zero.
Generative AI for Autonomous Driving: Frontiers and Opportunities
May 13, 2025Generative Artificial Intelligence (GenAI) constitutes a transformative technological wave that reconfigures industries through its unparalleled capabilities for content creation, reasoning, planning, and multimodal understanding. This revolutionary force offers the most promising path yet toward solving one of engineering's grandest challenges: achieving reliable, fully autonomous driving, particularly the pursuit of Level 5 autonomy. This survey delivers a comprehensive and critical synthesis of the emerging role of GenAI across the autonomous driving stack. We begin by distilling the principles and trade-offs of modern generative modeling, encompassing VAEs, GANs, Diffusion Models, and Large Language Models (LLMs). We then map their frontier applications in image, LiDAR, trajectory, occupancy, video generation as well as LLM-guided reasoning and decision making. We categorize practical applications, such as synthetic data workflows, end-to-end driving strategies, high-fidelity digital twin systems, smart transportation networks, and cross-domain transfer to embodied AI. We identify key obstacles and possibilities such as comprehensive generalization across rare cases, evaluation and safety checks, budget-limited implementation, regulatory compliance, ethical concerns, and environmental effects, while proposing research plans across theoretical assurances, trust metrics, transport integration, and socio-technical influence. By unifying these threads, the survey provides a forward-looking reference for researchers, engineers, and policymakers navigating the convergence of generative AI and advanced autonomous mobility. An actively maintained repository of cited works is available at https://github.com/taco-group/GenAI4AD.
Virtual Roads, Smarter Safety: A Digital Twin Framework for Mixed Autonomous Traffic Safety Analysis
Apr 24, 2025



This paper presents a digital-twin platform for active safety analysis in mixed traffic environments. The platform is built using a multi-modal data-enabled traffic environment constructed from drone-based aerial LiDAR, OpenStreetMap, and vehicle sensor data (e.g., GPS and inclinometer readings). High-resolution 3D road geometries are generated through AI-powered semantic segmentation and georeferencing of aerial LiDAR data. To simulate real-world driving scenarios, the platform integrates the CAR Learning to Act (CARLA) simulator, Simulation of Urban MObility (SUMO) traffic model, and NVIDIA PhysX vehicle dynamics engine. CARLA provides detailed micro-level sensor and perception data, while SUMO manages macro-level traffic flow. NVIDIA PhysX enables accurate modeling of vehicle behaviors under diverse conditions, accounting for mass distribution, tire friction, and center of mass. This integrated system supports high-fidelity simulations that capture the complex interactions between autonomous and conventional vehicles. Experimental results demonstrate the platform's ability to reproduce realistic vehicle dynamics and traffic scenarios, enhancing the analysis of active safety measures. Overall, the proposed framework advances traffic safety research by enabling in-depth, physics-informed evaluation of vehicle behavior in dynamic and heterogeneous traffic environments.
NuScenes-SpatialQA: A Spatial Understanding and Reasoning Benchmark for Vision-Language Models in Autonomous Driving
Apr 07, 2025


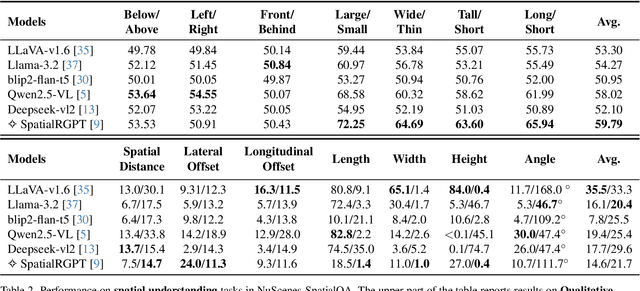
Recent advancements in Vision-Language Models (VLMs) have demonstrated strong potential for autonomous driving tasks. However, their spatial understanding and reasoning-key capabilities for autonomous driving-still exhibit significant limitations. Notably, none of the existing benchmarks systematically evaluate VLMs' spatial reasoning capabilities in driving scenarios. To fill this gap, we propose NuScenes-SpatialQA, the first large-scale ground-truth-based Question-Answer (QA) benchmark specifically designed to evaluate the spatial understanding and reasoning capabilities of VLMs in autonomous driving. Built upon the NuScenes dataset, the benchmark is constructed through an automated 3D scene graph generation pipeline and a QA generation pipeline. The benchmark systematically evaluates VLMs' performance in both spatial understanding and reasoning across multiple dimensions. Using this benchmark, we conduct extensive experiments on diverse VLMs, including both general and spatial-enhanced models, providing the first comprehensive evaluation of their spatial capabilities in autonomous driving. Surprisingly, the experimental results show that the spatial-enhanced VLM outperforms in qualitative QA but does not demonstrate competitiveness in quantitative QA. In general, VLMs still face considerable challenges in spatial understanding and reasoning.
AutoTrust: Benchmarking Trustworthiness in Large Vision Language Models for Autonomous Driving
Dec 19, 2024



Recent advancements in large vision language models (VLMs) tailored for autonomous driving (AD) have shown strong scene understanding and reasoning capabilities, making them undeniable candidates for end-to-end driving systems. However, limited work exists on studying the trustworthiness of DriveVLMs -- a critical factor that directly impacts public transportation safety. In this paper, we introduce AutoTrust, a comprehensive trustworthiness benchmark for large vision-language models in autonomous driving (DriveVLMs), considering diverse perspectives -- including trustfulness, safety, robustness, privacy, and fairness. We constructed the largest visual question-answering dataset for investigating trustworthiness issues in driving scenarios, comprising over 10k unique scenes and 18k queries. We evaluated six publicly available VLMs, spanning from generalist to specialist, from open-source to commercial models. Our exhaustive evaluations have unveiled previously undiscovered vulnerabilities of DriveVLMs to trustworthiness threats. Specifically, we found that the general VLMs like LLaVA-v1.6 and GPT-4o-mini surprisingly outperform specialized models fine-tuned for driving in terms of overall trustworthiness. DriveVLMs like DriveLM-Agent are particularly vulnerable to disclosing sensitive information. Additionally, both generalist and specialist VLMs remain susceptible to adversarial attacks and struggle to ensure unbiased decision-making across diverse environments and populations. Our findings call for immediate and decisive action to address the trustworthiness of DriveVLMs -- an issue of critical importance to public safety and the welfare of all citizens relying on autonomous transportation systems. Our benchmark is publicly available at \url{https://github.com/taco-group/AutoTrust}, and the leaderboard is released at \url{https://taco-group.github.io/AutoTrust/}.
OpenEMMA: Open-Source Multimodal Model for End-to-End Autonomous Driving
Dec 19, 2024Since the advent of Multimodal Large Language Models (MLLMs), they have made a significant impact across a wide range of real-world applications, particularly in Autonomous Driving (AD). Their ability to process complex visual data and reason about intricate driving scenarios has paved the way for a new paradigm in end-to-end AD systems. However, the progress of developing end-to-end models for AD has been slow, as existing fine-tuning methods demand substantial resources, including extensive computational power, large-scale datasets, and significant funding. Drawing inspiration from recent advancements in inference computing, we propose OpenEMMA, an open-source end-to-end framework based on MLLMs. By incorporating the Chain-of-Thought reasoning process, OpenEMMA achieves significant improvements compared to the baseline when leveraging a diverse range of MLLMs. Furthermore, OpenEMMA demonstrates effectiveness, generalizability, and robustness across a variety of challenging driving scenarios, offering a more efficient and effective approach to autonomous driving. We release all the codes in https://github.com/taco-group/OpenEMMA.
Physically Analyzable AI-Based Nonlinear Platoon Dynamics Modeling During Traffic Oscillation: A Koopman Approach
Jun 20, 2024Given the complexity and nonlinearity inherent in traffic dynamics within vehicular platoons, there exists a critical need for a modeling methodology with high accuracy while concurrently achieving physical analyzability. Currently, there are two predominant approaches: the physics model-based approach and the Artificial Intelligence (AI)--based approach. Knowing the facts that the physical-based model usually lacks sufficient modeling accuracy and potential function mismatches and the pure-AI-based method lacks analyzability, this paper innovatively proposes an AI-based Koopman approach to model the unknown nonlinear platoon dynamics harnessing the power of AI and simultaneously maintain physical analyzability, with a particular focus on periods of traffic oscillation. Specifically, this research first employs a deep learning framework to generate the embedding function that lifts the original space into the embedding space. Given the embedding space descriptiveness, the platoon dynamics can be expressed as a linear dynamical system founded by the Koopman theory. Based on that, the routine of linear dynamical system analysis can be conducted on the learned traffic linear dynamics in the embedding space. By that, the physical interpretability and analyzability of model-based methods with the heightened precision inherent in data-driven approaches can be synergized. Comparative experiments have been conducted with existing modeling approaches, which suggests our method's superiority in accuracy. Additionally, a phase plane analysis is performed, further evidencing our approach's effectiveness in replicating the complex dynamic patterns. Moreover, the proposed methodology is proven to feature the capability of analyzing the stability, attesting to the physical analyzability.