 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
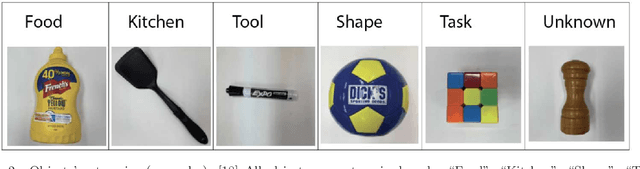
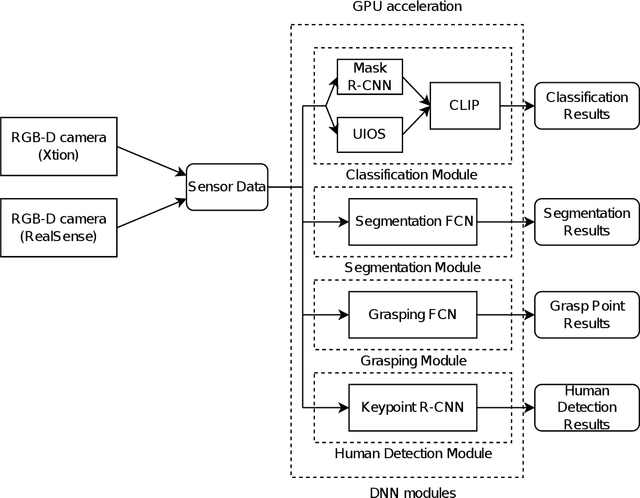
Add to EdgeTRAIL Team Description Paper for RoboCup@Home 2023
Oct 05, 2023



Our team, TRAIL, consists of AI/ML laboratory members from The University of Tokyo. We leverage our extensive research experience in state-of-the-art machine learning to build general-purpose in-home service robots. We previously participated in two competitions using Human Support Robot (HSR): RoboCup@Home Japan Open 2020 (DSPL) and World Robot Summit 2020, equivalent to RoboCup World Tournament. Throughout the competitions, we showed that a data-driven approach is effective for performing in-home tasks. Aiming for further development of building a versatile and fast-adaptable system, in RoboCup @Home 2023, we unify three technologies that have recently been evaluated as components in the fields of deep learning and robot learning into a real household robot system. In addition, to stimulate research all over the RoboCup@Home community, we build a platform that manages data collected from each site belonging to the community around the world, taking advantage of the characteristics of the community.
Self-Recovery Prompting: Promptable General Purpose Service Robot System with Foundation Models and Self-Recovery
Sep 27, 2023



A general-purpose service robot (GPSR), which can execute diverse tasks in various environments, requires a system with high generalizability and adaptability to tasks and environments. In this paper, we first developed a top-level GPSR system for worldwide competition (RoboCup@Home 2023) based on multiple foundation models. This system is both generalizable to variations and adaptive by prompting each model. Then, by analyzing the performance of the developed system, we found three types of failure in more realistic GPSR application settings: insufficient information, incorrect plan generation, and plan execution failure. We then propose the self-recovery prompting pipeline, which explores the necessary information and modifies its prompts to recover from failure. We experimentally confirm that the system with the self-recovery mechanism can accomplish tasks by resolving various failure cases. Supplementary videos are available at https://sites.google.com/view/srgpsr .
GenDOM: Generalizable One-shot Deformable Object Manipulation with Parameter-Aware Policy
Sep 19, 2023Due to the inherent uncertainty in their deformability during motion, previous methods in deformable object manipulation, such as rope and cloth, often required hundreds of real-world demonstrations to train a manipulation policy for each object, which hinders their applications in our ever-changing world. To address this issue, we introduce GenDOM, a framework that allows the manipulation policy to handle different deformable objects with only a single real-world demonstration. To achieve this, we augment the policy by conditioning it on deformable object parameters and training it with a diverse range of simulated deformable objects so that the policy can adjust actions based on different object parameters. At the time of inference, given a new object, GenDOM can estimate the deformable object parameters with only a single real-world demonstration by minimizing the disparity between the grid density of point clouds of real-world demonstrations and simulations in a differentiable physics simulator. Empirical validations on both simulated and real-world object manipulation setups clearly show that our method can manipulate different objects with a single demonstration and significantly outperforms the baseline in both environments (a 62% improvement for in-domain ropes and a 15% improvement for out-of-distribution ropes in simulation, as well as a 26% improvement for ropes and a 50% improvement for cloths in the real world), demonstrating the effectiveness of our approach in one-shot deformable object manipulation.
GenORM: Generalizable One-shot Rope Manipulation with Parameter-Aware Policy
Jun 20, 2023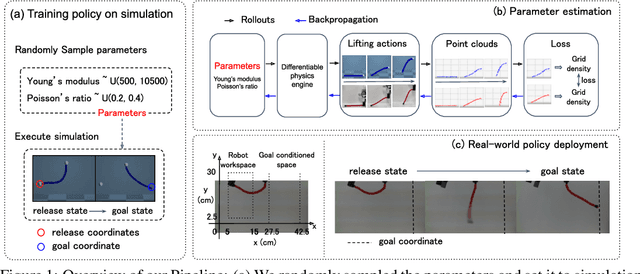
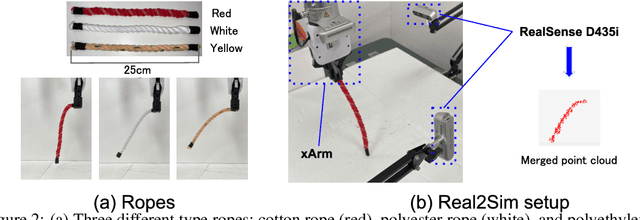
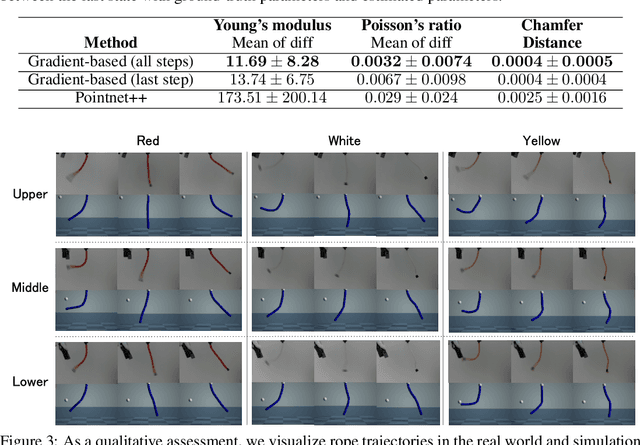
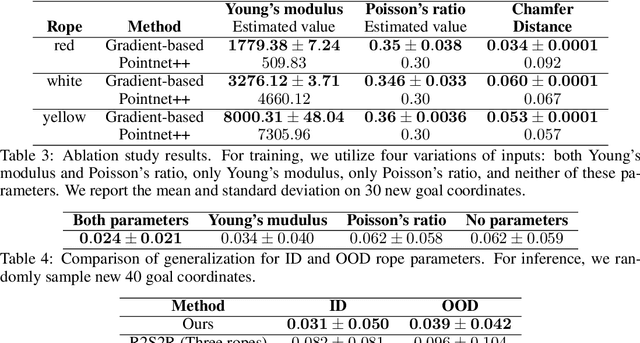
Due to the inherent uncertainty in their deformability during motion, previous methods in rope manipulation often require hundreds of real-world demonstrations to train a manipulation policy for each rope, even for simple tasks such as rope goal reaching, which hinder their applications in our ever-changing world. To address this issue, we introduce GenORM, a framework that allows the manipulation policy to handle different deformable ropes with a single real-world demonstration. To achieve this, we augment the policy by conditioning it on deformable rope parameters and training it with a diverse range of simulated deformable ropes so that the policy can adjust actions based on different rope parameters. At the time of inference, given a new rope, GenORM estimates the deformable rope parameters by minimizing the disparity between the grid density of point clouds of real-world demonstrations and simulations. With the help of a differentiable physics simulator, we require only a single real-world demonstration. Empirical validations on both simulated and real-world rope manipulation setups clearly show that our method can manipulate different ropes with a single demonstration and significantly outperforms the baseline in both environments (62% improvement in in-domain ropes, and 15% improvement in out-of-distribution ropes in simulation, 26% improvement in real-world), demonstrating the effectiveness of our approach in one-shot rope manipulation.
World Robot Challenge 2020 -- Partner Robot: A Data-Driven Approach for Room Tidying with Mobile Manipulator
Jul 22, 2022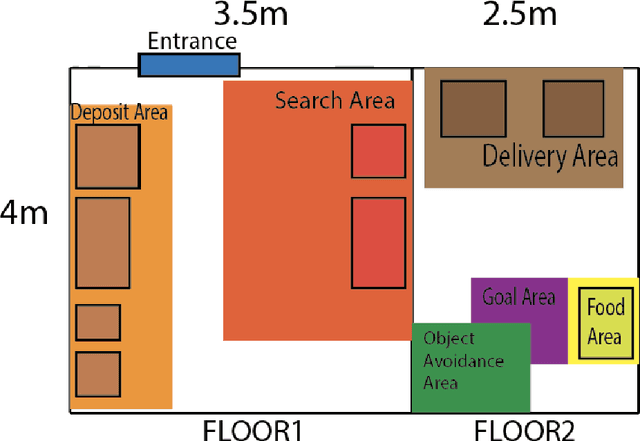

Tidying up a household environment using a mobile manipulator poses various challenges in robotics, such as adaptation to large real-world environmental variations, and safe and robust deployment in the presence of humans.The Partner Robot Challenge in World Robot Challenge (WRC) 2020, a global competition held in September 2021, benchmarked tidying tasks in the real home environments, and importantly, tested for full system performances.For this challenge, we developed an entire household service robot system, which leverages a data-driven approach to adapt to numerous edge cases that occur during the execution, instead of classical manual pre-programmed solutions. In this paper, we describe the core ingredients of the proposed robot system, including visual recognition, object manipulation, and motion planning. Our robot system won the second prize, verifying the effectiveness and potential of data-driven robot systems for mobile manipulation in home environments.
VaxNeRF: Revisiting the Classic for Voxel-Accelerated Neural Radiance Field
Nov 25, 2021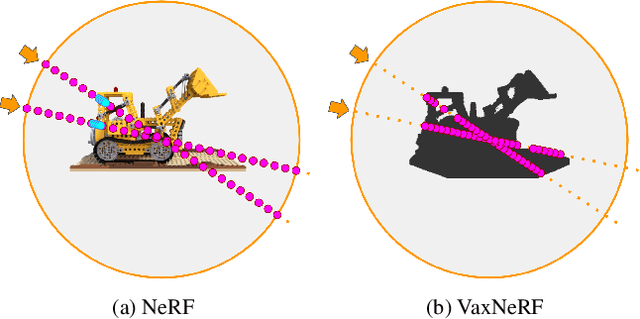
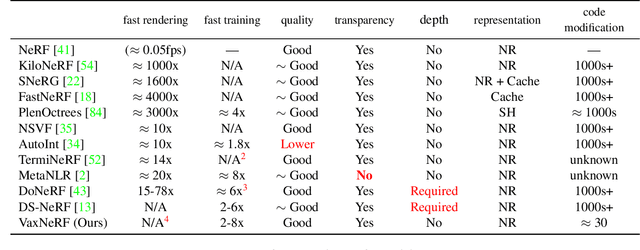
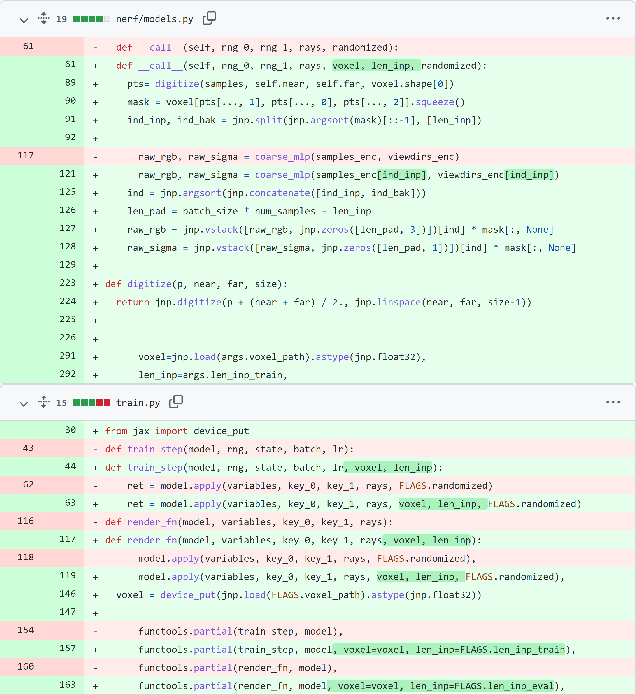
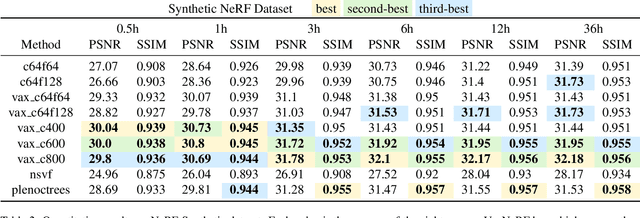
Neural Radiance Field (NeRF) is a popular method in data-driven 3D reconstruction. Given its simplicity and high quality rendering, many NeRF applications are being developed. However, NeRF's big limitation is its slow speed. Many attempts are made to speeding up NeRF training and inference, including intricate code-level optimization and caching, use of sophisticated data structures, and amortization through multi-task and meta learning. In this work, we revisit the basic building blocks of NeRF through the lens of classic techniques before NeRF. We propose Voxel-Accelearated NeRF (VaxNeRF), integrating NeRF with visual hull, a classic 3D reconstruction technique only requiring binary foreground-background pixel labels per image. Visual hull, which can be optimized in about 10 seconds, can provide coarse in-out field separation to omit substantial amounts of network evaluations in NeRF. We provide a clean fully-pythonic, JAX-based implementation on the popular JaxNeRF codebase, consisting of only about 30 lines of code changes and a modular visual hull subroutine, and achieve about 2-8x faster learning on top of the highly-performative JaxNeRF baseline with zero degradation in rendering quality. With sufficient compute, this effectively brings down full NeRF training from hours to 30 minutes. We hope VaxNeRF -- a careful combination of a classic technique with a deep method (that arguably replaced it) -- can empower and accelerate new NeRF extensions and applications, with its simplicity, portability, and reliable performance gains. Codes are available at https://github.com/naruya/VaxNeRF .