 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTRAIL Team Description Paper for RoboCup@Home 2023
Oct 05, 2023



Our team, TRAIL, consists of AI/ML laboratory members from The University of Tokyo. We leverage our extensive research experience in state-of-the-art machine learning to build general-purpose in-home service robots. We previously participated in two competitions using Human Support Robot (HSR): RoboCup@Home Japan Open 2020 (DSPL) and World Robot Summit 2020, equivalent to RoboCup World Tournament. Throughout the competitions, we showed that a data-driven approach is effective for performing in-home tasks. Aiming for further development of building a versatile and fast-adaptable system, in RoboCup @Home 2023, we unify three technologies that have recently been evaluated as components in the fields of deep learning and robot learning into a real household robot system. In addition, to stimulate research all over the RoboCup@Home community, we build a platform that manages data collected from each site belonging to the community around the world, taking advantage of the characteristics of the community.
World Robot Challenge 2020 -- Partner Robot: A Data-Driven Approach for Room Tidying with Mobile Manipulator
Jul 22, 2022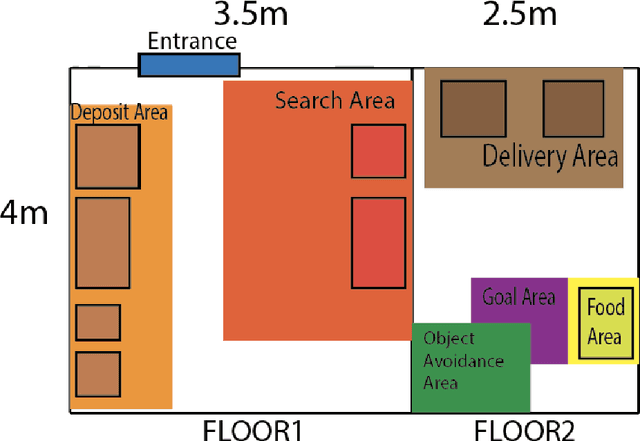
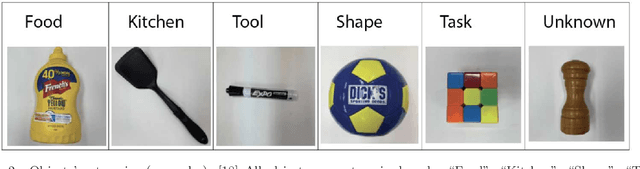

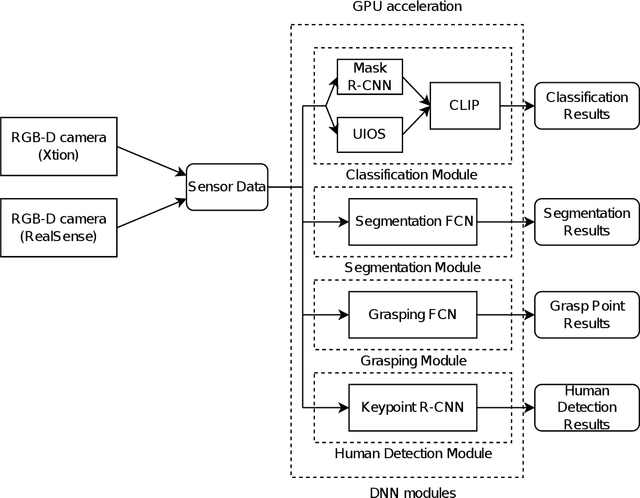
Tidying up a household environment using a mobile manipulator poses various challenges in robotics, such as adaptation to large real-world environmental variations, and safe and robust deployment in the presence of humans.The Partner Robot Challenge in World Robot Challenge (WRC) 2020, a global competition held in September 2021, benchmarked tidying tasks in the real home environments, and importantly, tested for full system performances.For this challenge, we developed an entire household service robot system, which leverages a data-driven approach to adapt to numerous edge cases that occur during the execution, instead of classical manual pre-programmed solutions. In this paper, we describe the core ingredients of the proposed robot system, including visual recognition, object manipulation, and motion planning. Our robot system won the second prize, verifying the effectiveness and potential of data-driven robot systems for mobile manipulation in home environments.