 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCrafting a Good Prompt or Providing Exemplary Dialogues? A Study of In-Context Learning for Persona-based Dialogue Generation
Feb 17, 2024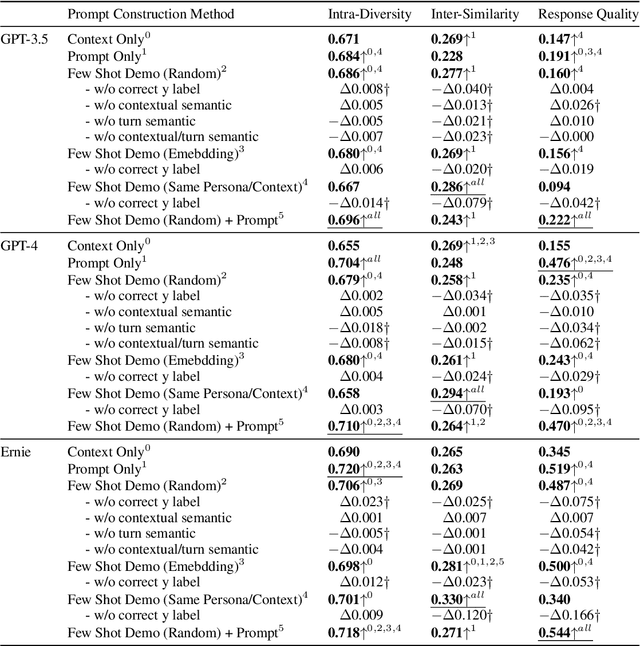
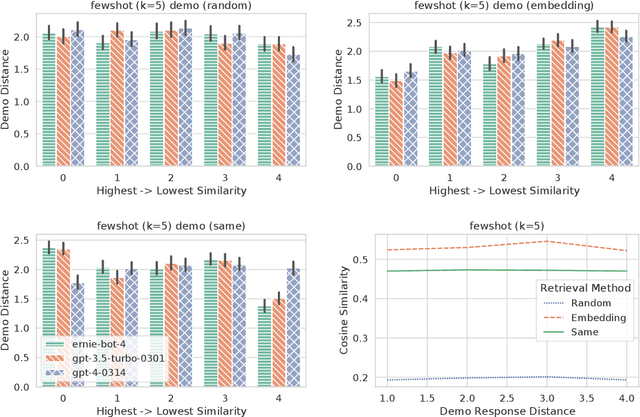
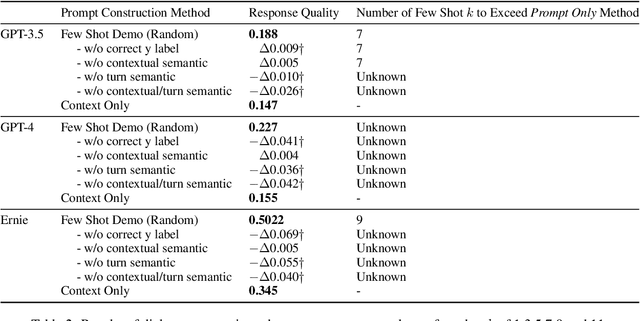
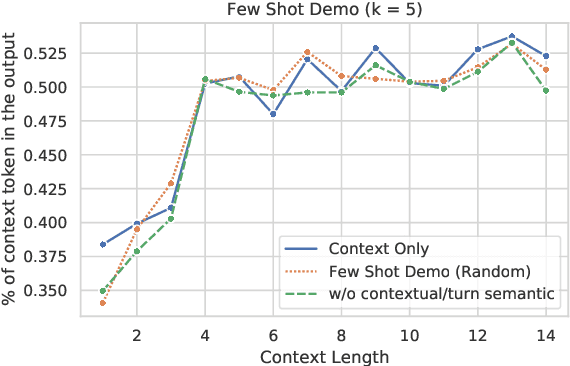
Previous in-context learning (ICL) research has focused on tasks such as classification, machine translation, text2table, etc., while studies on whether ICL can improve human-like dialogue generation are scarce. Our work fills this gap by systematically investigating the ICL capabilities of large language models (LLMs) in persona-based dialogue generation, conducting extensive experiments on high-quality real human Chinese dialogue datasets. From experimental results, we draw three conclusions: 1) adjusting prompt instructions is the most direct, effective, and economical way to improve generation quality; 2) randomly retrieving demonstrations (demos) achieves the best results, possibly due to the greater diversity and the amount of effective information; counter-intuitively, retrieving demos with a context identical to the query performs the worst; 3) even when we destroy the multi-turn associations and single-turn semantics in the demos, increasing the number of demos still improves dialogue performance, proving that LLMs can learn from corrupted dialogue demos. Previous explanations of the ICL mechanism, such as $n$-gram induction head, cannot fully account for this phenomenon.
Learn to Augment Network Simulators Towards Digital Network Twins
Nov 21, 2023



Digital network twin (DNT) is a promising paradigm to replicate real-world cellular networks toward continual assessment, proactive management, and what-if analysis. Existing discussions have been focusing on using only deep learning techniques to build DNTs, which raises widespread concerns regarding their generalization, explainability, and transparency. In this paper, we explore an alternative approach to augment network simulators with context-aware neural agents. The main challenge lies in the non-trivial simulation-to-reality (sim-to-real) discrepancy between offline simulators and real-world networks. To solve the challenge, we propose a new learn-to-bridge algorithm to cost-efficiently bridge the sim-to-real discrepancy in two alternative stages. In the first stage, we select states to query performances in real-world networks by using newly-designed cost-aware Bayesian optimization. In the second stage, we train the neural agent to learn the state context and bridge the probabilistic discrepancy based on Bayesian neural networks (BNN). In addition, we build a small-scale end-to-end network testbed based on OpenAirInterface RAN and Core with USRP B210 and a smartphone, and replicate the network in NS-3. The evaluation results show that, our proposed solution substantially outperforms existing methods, with more than 92\% reduction in the sim-to-real discrepancy.
AdaMap: High-Scalable Real-Time Cooperative Perception at the Edge
Oct 03, 2023



Cooperative perception is the key approach to augment the perception of connected and automated vehicles (CAVs) toward safe autonomous driving. However, it is challenging to achieve real-time perception sharing for hundreds of CAVs in large-scale deployment scenarios. In this paper, we propose AdaMap, a new high-scalable real-time cooperative perception system, which achieves assured percentile end-to-end latency under time-varying network dynamics. To achieve AdaMap, we design a tightly coupled data plane and control plane. In the data plane, we design a new hybrid localization module to dynamically switch between object detection and tracking, and a novel point cloud representation module to adaptively compress and reconstruct the point cloud of detected objects. In the control plane, we design a new graph-based object selection method to un-select excessive multi-viewed point clouds of objects, and a novel approximated gradient descent algorithm to optimize the representation of point clouds. We implement AdaMap on an emulation platform, including realistic vehicle and server computation and a simulated 5G network, under a 150-CAV trace collected from the CARLA simulator. The evaluation results show that, AdaMap reduces up to 49x average transmission data size at the cost of 0.37 reconstruction loss, as compared to state-of-the-art solutions, which verifies its high scalability, adaptability, and computation efficiency.
CoMap: Proactive Provision for Crowdsourcing Map in Automotive Edge Computing
Feb 07, 2023

Crowdsourcing data from connected and automated vehicles (CAVs) is a cost-efficient way to achieve high-definition maps with up-to-date transient road information. Achieving the map with deterministic latency performance is, however, challenging due to the unpredictable resource competition and distributional resource demands. In this paper, we propose CoMap, a new crowdsourcing high definition (HD) map to minimize the monetary cost of network resource usage while satisfying the percentile requirement of end-to-end latency. We design a novel CROP algorithm to learn the resource demands of CAV offloading, optimize offloading decisions, and proactively allocate temporal network resources in a fully distributed manner. In particular, we create a prediction model to estimate the uncertainty of resource demands based on Bayesian neural networks and develop a utilization balancing scheme to resolve the imbalanced resource utilization in individual infrastructures. We evaluate the performance of CoMap with extensive simulations in an automotive edge computing network simulator. The results show that CoMap reduces up to 80.4% average resource usage as compared to existing solutions.
RoNet: Toward Robust Neural Assisted Mobile Network Configuration
Feb 07, 2023



Automating configuration is the key path to achieving zero-touch network management in ever-complicating mobile networks. Deep learning techniques show great potential to automatically learn and tackle high-dimensional networking problems. The vulnerability of deep learning to deviated input space, however, raises increasing deployment concerns under unpredictable variabilities and simulation-to-reality discrepancy in real-world networks. In this paper, we propose a novel RoNet framework to improve the robustness of neural-assisted configuration policies. We formulate the network configuration problem to maximize performance efficiency when serving diverse user applications. We design three integrated stages with novel normal training, learn-to-attack, and robust defense method for balancing the robustness and performance of policies. We evaluate RoNet via the NS-3 simulator extensively and the simulation results show that RoNet outperforms existing solutions in terms of robustness, adaptability, and scalability.
EdgeMap: CrowdSourcing High Definition Map in Automotive Edge Computing
Jan 20, 2022
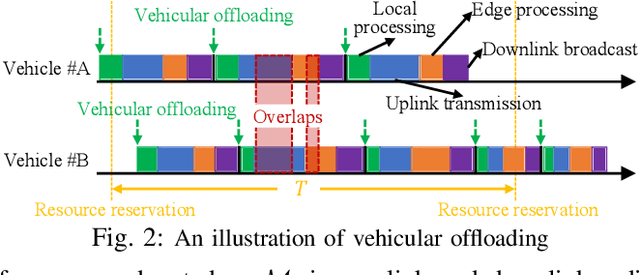


High definition (HD) map needs to be updated frequently to capture road changes, which is constrained by limited specialized collection vehicles. To maintain an up-to-date map, we explore crowdsourcing data from connected vehicles. Updating the map collaboratively is, however, challenging under constrained transmission and computation resources in dynamic networks. In this paper, we propose EdgeMap, a crowdsourcing HD map to minimize the usage of network resources while maintaining the latency requirements. We design a DATE algorithm to adaptively offload vehicular data on a small time scale and reserve network resources on a large time scale, by leveraging the multi-agent deep reinforcement learning and Gaussian process regression. We evaluate the performance of EdgeMap with extensive network simulations in a time-driven end-to-end simulator. The results show that EdgeMap reduces more than 30% resource usage as compared to state-of-the-art solutions.