 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBiTrajDiff: Bidirectional Trajectory Generation with Diffusion Models for Offline Reinforcement Learning
Jun 06, 2025Recent advances in offline Reinforcement Learning (RL) have proven that effective policy learning can benefit from imposing conservative constraints on pre-collected datasets. However, such static datasets often exhibit distribution bias, resulting in limited generalizability. To address this limitation, a straightforward solution is data augmentation (DA), which leverages generative models to enrich data distribution. Despite the promising results, current DA techniques focus solely on reconstructing future trajectories from given states, while ignoring the exploration of history transitions that reach them. This single-direction paradigm inevitably hinders the discovery of diverse behavior patterns, especially those leading to critical states that may have yielded high-reward outcomes. In this work, we introduce Bidirectional Trajectory Diffusion (BiTrajDiff), a novel DA framework for offline RL that models both future and history trajectories from any intermediate states. Specifically, we decompose the trajectory generation task into two independent yet complementary diffusion processes: one generating forward trajectories to predict future dynamics, and the other generating backward trajectories to trace essential history transitions.BiTrajDiff can efficiently leverage critical states as anchors to expand into potentially valuable yet underexplored regions of the state space, thereby facilitating dataset diversity. Extensive experiments on the D4RL benchmark suite demonstrate that BiTrajDiff achieves superior performance compared to other advanced DA methods across various offline RL backbones.
Temporal Prototype-Aware Learning for Active Voltage Control on Power Distribution Networks
Jun 25, 2024


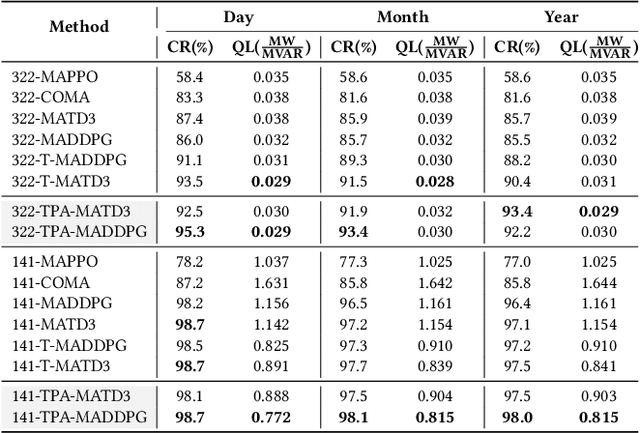
Active Voltage Control (AVC) on the Power Distribution Networks (PDNs) aims to stabilize the voltage levels to ensure efficient and reliable operation of power systems. With the increasing integration of distributed energy resources, recent efforts have explored employing multi-agent reinforcement learning (MARL) techniques to realize effective AVC. Existing methods mainly focus on the acquisition of short-term AVC strategies, i.e., only learning AVC within the short-term training trajectories of a singular diurnal cycle. However, due to the dynamic nature of load demands and renewable energy, the operation states of real-world PDNs may exhibit significant distribution shifts across varying timescales (e.g., daily and seasonal changes). This can render those short-term strategies suboptimal or even obsolete when performing continuous AVC over extended periods. In this paper, we propose a novel temporal prototype-aware learning method, abbreviated as TPA, to learn time-adaptive AVC under short-term training trajectories. At the heart of TPA are two complementary components, namely multi-scale dynamic encoder and temporal prototype-aware policy, that can be readily incorporated into various MARL methods. The former component integrates a stacked transformer network to learn underlying temporal dependencies at different timescales of the PDNs, while the latter implements a learnable prototype matching mechanism to construct a dedicated AVC policy that can dynamically adapt to the evolving operation states. Experimental results on the AVC benchmark with different PDN sizes demonstrate that the proposed TPA surpasses the state-of-the-art counterparts not only in terms of control performance but also by offering model transferability. Our code is available at https://github.com/Canyizl/TPA-for-AVC.
Advantage-Aware Policy Optimization for Offline Reinforcement Learning
Mar 12, 2024Offline Reinforcement Learning (RL) endeavors to leverage offline datasets to craft effective agent policy without online interaction, which imposes proper conservative constraints with the support of behavior policies to tackle the Out-Of-Distribution (OOD) problem. However, existing works often suffer from the constraint conflict issue when offline datasets are collected from multiple behavior policies, i.e., different behavior policies may exhibit inconsistent actions with distinct returns across the state space. To remedy this issue, recent Advantage-Weighted (AW) methods prioritize samples with high advantage values for agent training while inevitably leading to overfitting on these samples. In this paper, we introduce a novel Advantage-Aware Policy Optimization (A2PO) method to explicitly construct advantage-aware policy constraints for offline learning under mixed-quality datasets. Specifically, A2PO employs a Conditional Variational Auto-Encoder (CVAE) to disentangle the action distributions of intertwined behavior policies by modeling the advantage values of all training data as conditional variables. Then the agent can follow such disentangled action distribution constraints to optimize the advantage-aware policy towards high advantage values. Extensive experiments conducted on both the single-quality and mixed-quality datasets of the D4RL benchmark demonstrate that A2PO yields results superior to state-of-the-art counterparts. Our code will be made publicly available.
Powerformer: A Section-adaptive Transformer for Power Flow Adjustment
Jan 10, 2024



In this paper, we present a novel transformer architecture tailored for learning robust power system state representations, which strives to optimize power dispatch for the power flow adjustment across different transmission sections. Specifically, our proposed approach, named Powerformer, develops a dedicated section-adaptive attention mechanism, separating itself from the self-attention used in conventional transformers. This mechanism effectively integrates power system states with transmission section information, which facilitates the development of robust state representations. Furthermore, by considering the graph topology of power system and the electrical attributes of bus nodes, we introduce two customized strategies to further enhance the expressiveness: graph neural network propagation and multi-factor attention mechanism. Extensive evaluations are conducted on three power system scenarios, including the IEEE 118-bus system, a realistic 300-bus system in China, and a large-scale European system with 9241 buses, where Powerformer demonstrates its superior performance over several baseline methods.
Curricular Subgoals for Inverse Reinforcement Learning
Jun 14, 2023



Inverse Reinforcement Learning (IRL) aims to reconstruct the reward function from expert demonstrations to facilitate policy learning, and has demonstrated its remarkable success in imitation learning. To promote expert-like behavior, existing IRL methods mainly focus on learning global reward functions to minimize the trajectory difference between the imitator and the expert. However, these global designs are still limited by the redundant noise and error propagation problems, leading to the unsuitable reward assignment and thus downgrading the agent capability in complex multi-stage tasks. In this paper, we propose a novel Curricular Subgoal-based Inverse Reinforcement Learning (CSIRL) framework, that explicitly disentangles one task with several local subgoals to guide agent imitation. Specifically, CSIRL firstly introduces decision uncertainty of the trained agent over expert trajectories to dynamically select subgoals, which directly determines the exploration boundary of different task stages. To further acquire local reward functions for each stage, we customize a meta-imitation objective based on these curricular subgoals to train an intrinsic reward generator. Experiments on the D4RL and autonomous driving benchmarks demonstrate that the proposed methods yields results superior to the state-of-the-art counterparts, as well as better interpretability. Our code is available at https://github.com/Plankson/CSIRL.
Is Centralized Training with Decentralized Execution Framework Centralized Enough for MARL?
May 27, 2023


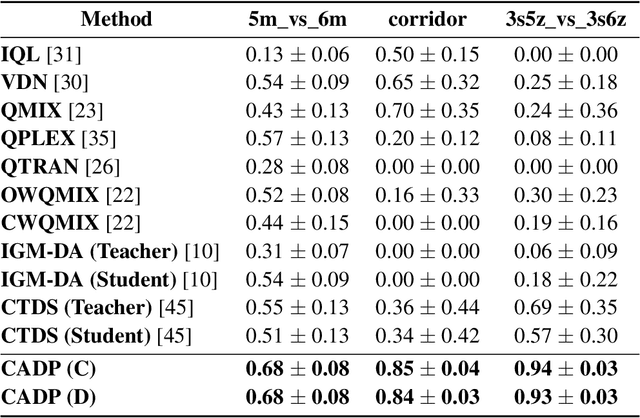
Centralized Training with Decentralized Execution (CTDE) has recently emerged as a popular framework for cooperative Multi-Agent Reinforcement Learning (MARL), where agents can use additional global state information to guide training in a centralized way and make their own decisions only based on decentralized local policies. Despite the encouraging results achieved, CTDE makes an independence assumption on agent policies, which limits agents to adopt global cooperative information from each other during centralized training. Therefore, we argue that existing CTDE methods cannot fully utilize global information for training, leading to an inefficient joint-policy exploration and even suboptimal results. In this paper, we introduce a novel Centralized Advising and Decentralized Pruning (CADP) framework for multi-agent reinforcement learning, that not only enables an efficacious message exchange among agents during training but also guarantees the independent policies for execution. Firstly, CADP endows agents the explicit communication channel to seek and take advices from different agents for more centralized training. To further ensure the decentralized execution, we propose a smooth model pruning mechanism to progressively constraint the agent communication into a closed one without degradation in agent cooperation capability. Empirical evaluations on StarCraft II micromanagement and Google Research Football benchmarks demonstrate that the proposed framework achieves superior performance compared with the state-of-the-art counterparts. Our code will be made publicly available.
A Survey on Explainable Reinforcement Learning: Concepts, Algorithms, Challenges
Nov 15, 2022Reinforcement Learning (RL) is a popular machine learning paradigm where intelligent agents interact with the environment to fulfill a long-term goal. Driven by the resurgence of deep learning, Deep RL (DRL) has witnessed great success over a wide spectrum of complex control tasks. Despite the encouraging results achieved, the deep neural network-based backbone is widely deemed as a black box that impedes practitioners to trust and employ trained agents in realistic scenarios where high security and reliability are essential. To alleviate this issue, a large volume of literature devoted to shedding light on the inner workings of the intelligent agents has been proposed, by constructing intrinsic interpretability or post-hoc explainability. In this survey, we provide a comprehensive review of existing works on eXplainable RL (XRL) and introduce a new taxonomy where prior works are clearly categorized into model-explaining, reward-explaining, state-explaining, and task-explaining methods. We also review and highlight RL methods that conversely leverage human knowledge to promote learning efficiency and final performance of agents while this kind of method is often ignored in XRL field. Some open challenges and opportunities in XRL are discussed. This survey intends to provide a high-level summarization and better understanding of XRL and to motivate future research on more effective XRL solutions. Corresponding open source codes are collected and categorized at https://github.com/Plankson/awesome-explainable-reinforcement-learning.