 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenFly: A Versatile Toolchain and Large-scale Benchmark for Aerial Vision-Language Navigation
Feb 25, 2025Vision-Language Navigation (VLN) aims to guide agents through an environment by leveraging both language instructions and visual cues, playing a pivotal role in embodied AI. Indoor VLN has been extensively studied, whereas outdoor aerial VLN remains underexplored. The potential reason is that outdoor aerial view encompasses vast areas, making data collection more challenging, which results in a lack of benchmarks. To address this problem, we propose OpenFly, a platform comprising a versatile toolchain and large-scale benchmark for aerial VLN. Firstly, we develop a highly automated toolchain for data collection, enabling automatic point cloud acquisition, scene semantic segmentation, flight trajectory creation, and instruction generation. Secondly, based on the toolchain, we construct a large-scale aerial VLN dataset with 100k trajectories, covering diverse heights and lengths across 18 scenes. The corresponding visual data are generated using various rendering engines and advanced techniques, including Unreal Engine, GTA V, Google Earth, and 3D Gaussian Splatting (3D GS). All data exhibit high visual quality. Particularly, 3D GS supports real-to-sim rendering, further enhancing the realism of the dataset. Thirdly, we propose OpenFly-Agent, a keyframe-aware VLN model, which takes language instructions, current observations, and historical keyframes as input, and outputs flight actions directly. Extensive analyses and experiments are conducted, showcasing the superiority of our OpenFly platform and OpenFly-Agent. The toolchain, dataset, and codes will be open-sourced.
FusionANNS: An Efficient CPU/GPU Cooperative Processing Architecture for Billion-scale Approximate Nearest Neighbor Search
Sep 25, 2024
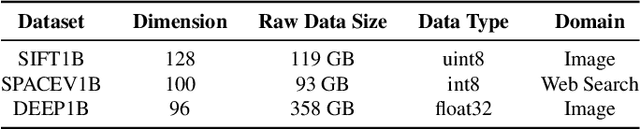


Approximate nearest neighbor search (ANNS) has emerged as a crucial component of database and AI infrastructure. Ever-increasing vector datasets pose significant challenges in terms of performance, cost, and accuracy for ANNS services. None of modern ANNS systems can address these issues simultaneously. We present FusionANNS, a high-throughput, low-latency, cost-efficient, and high-accuracy ANNS system for billion-scale datasets using SSDs and only one entry-level GPU. The key idea of FusionANNS lies in CPU/GPU collaborative filtering and re-ranking mechanisms, which significantly reduce I/O operations across CPUs, GPU, and SSDs to break through the I/O performance bottleneck. Specifically, we propose three novel designs: (1) multi-tiered indexing to avoid data swapping between CPUs and GPU, (2) heuristic re-ranking to eliminate unnecessary I/Os and computations while guaranteeing high accuracy, and (3) redundant-aware I/O deduplication to further improve I/O efficiency. We implement FusionANNS and compare it with the state-of-the-art SSD-based ANNS system--SPANN and GPU-accelerated in-memory ANNS system--RUMMY. Experimental results show that FusionANNS achieves 1) 9.4-13.1X higher query per second (QPS) and 5.7-8.8X higher cost efficiency compared with SPANN; 2) and 2-4.9X higher QPS and 2.3-6.8X higher cost efficiency compared with RUMMY, while guaranteeing low latency and high accuracy.
Physical prior guided cooperative learning framework for joint turbulence degradation estimation and infrared video restoration
Aug 08, 2024Infrared imaging and turbulence strength measurements are in widespread demand in many fields. This paper introduces a Physical Prior Guided Cooperative Learning (P2GCL) framework to jointly enhance atmospheric turbulence strength estimation and infrared image restoration. P2GCL involves a cyclic collaboration between two models, i.e., a TMNet measures turbulence strength and outputs the refractive index structure constant (Cn2) as a physical prior, a TRNet conducts infrared image sequence restoration based on Cn2 and feeds the restored images back to the TMNet to boost the measurement accuracy. A novel Cn2-guided frequency loss function and a physical constraint loss are introduced to align the training process with physical theories. Experiments demonstrate P2GCL achieves the best performance for both turbulence strength estimation (improving Cn2 MAE by 0.0156, enhancing R2 by 0.1065) and image restoration (enhancing PSNR by 0.2775 dB), validating the significant impact of physical prior guided cooperative learning.