 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOASIS: Harnessing Diffusion Adversarial Network for Ocean Salinity Imputation using Sparse Drifter Trajectories
Aug 29, 2025Ocean salinity plays a vital role in circulation, climate, and marine ecosystems, yet its measurement is often sparse, irregular, and noisy, especially in drifter-based datasets. Traditional approaches, such as remote sensing and optimal interpolation, rely on linearity and stationarity, and are limited by cloud cover, sensor drift, and low satellite revisit rates. While machine learning models offer flexibility, they often fail under severe sparsity and lack principled ways to incorporate physical covariates without specialized sensors. In this paper, we introduce the OceAn Salinity Imputation System (OASIS), a novel diffusion adversarial framework designed to address these challenges.
3D-SeqMOS: A Novel Sequential 3D Moving Object Segmentation in Autonomous Driving
Jul 18, 2023
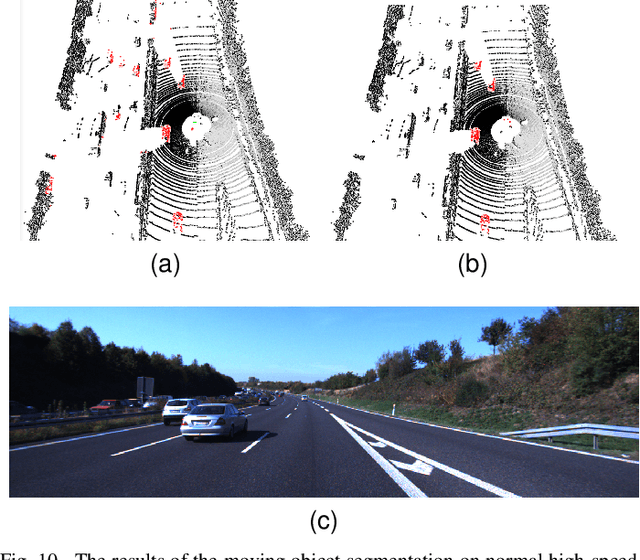
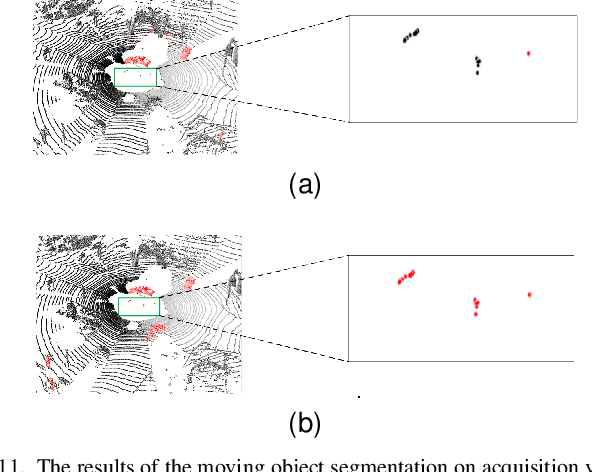
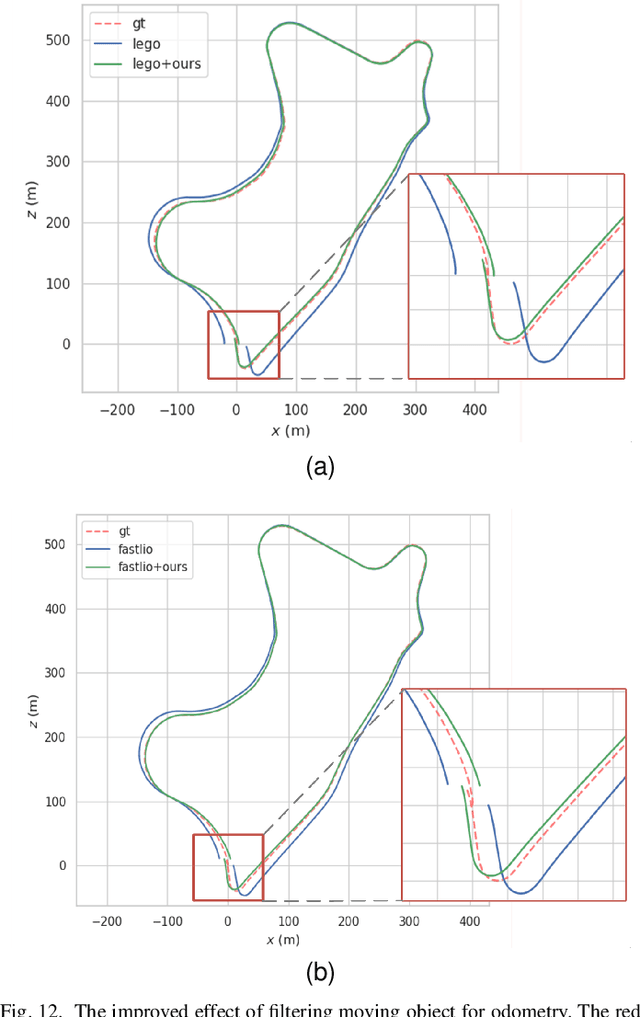
For the SLAM system in robotics and autonomous driving, the accuracy of front-end odometry and back-end loop-closure detection determine the whole intelligent system performance. But the LiDAR-SLAM could be disturbed by current scene moving objects, resulting in drift errors and even loop-closure failure. Thus, the ability to detect and segment moving objects is essential for high-precision positioning and building a consistent map. In this paper, we address the problem of moving object segmentation from 3D LiDAR scans to improve the odometry and loop-closure accuracy of SLAM. We propose a novel 3D Sequential Moving-Object-Segmentation (3D-SeqMOS) method that can accurately segment the scene into moving and static objects, such as moving and static cars. Different from the existing projected-image method, we process the raw 3D point cloud and build a 3D convolution neural network for MOS task. In addition, to make full use of the spatio-temporal information of point cloud, we propose a point cloud residual mechanism using the spatial features of current scan and the temporal features of previous residual scans. Besides, we build a complete SLAM framework to verify the effectiveness and accuracy of 3D-SeqMOS. Experiments on SemanticKITTI dataset show that our proposed 3D-SeqMOS method can effectively detect moving objects and improve the accuracy of LiDAR odometry and loop-closure detection. The test results show our 3D-SeqMOS outperforms the state-of-the-art method by 12.4%. We extend the proposed method to the SemanticKITTI: Moving Object Segmentation competition and achieve the 2nd in the leaderboard, showing its effectiveness.
GraSSNet: Graph Soft Sensing Neural Networks
Nov 12, 2021
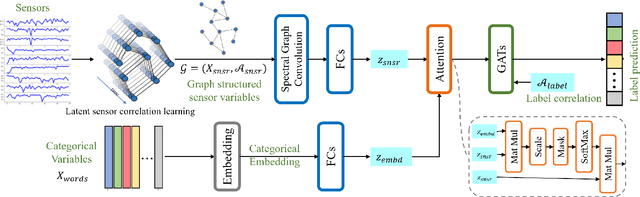
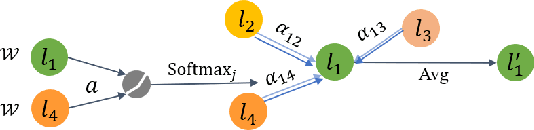
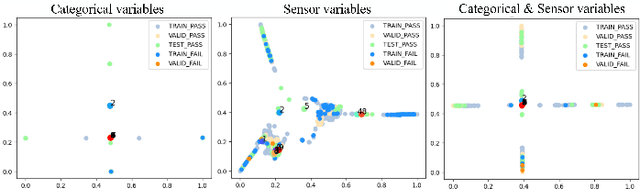
In the era of big data, data-driven based classification has become an essential method in smart manufacturing to guide production and optimize inspection. The industrial data obtained in practice is usually time-series data collected by soft sensors, which are highly nonlinear, nonstationary, imbalanced, and noisy. Most existing soft-sensing machine learning models focus on capturing either intra-series temporal dependencies or pre-defined inter-series correlations, while ignoring the correlation between labels as each instance is associated with multiple labels simultaneously. In this paper, we propose a novel graph based soft-sensing neural network (GraSSNet) for multivariate time-series classification of noisy and highly-imbalanced soft-sensing data. The proposed GraSSNet is able to 1) capture the inter-series and intra-series dependencies jointly in the spectral domain; 2) exploit the label correlations by superimposing label graph that built from statistical co-occurrence information; 3) learn features with attention mechanism from both textual and numerical domain; and 4) leverage unlabeled data and mitigate data imbalance by semi-supervised learning. Comparative studies with other commonly used classifiers are carried out on Seagate soft sensing data, and the experimental results validate the competitive performance of our proposed method.
Integrated Path Planning and Tracking Control of Marine Current Turbine in Uncertain Ocean Environments
Oct 14, 2021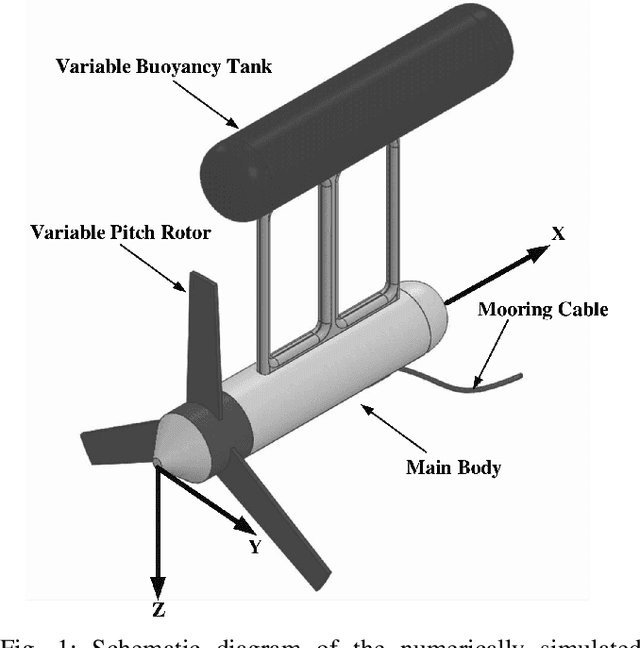
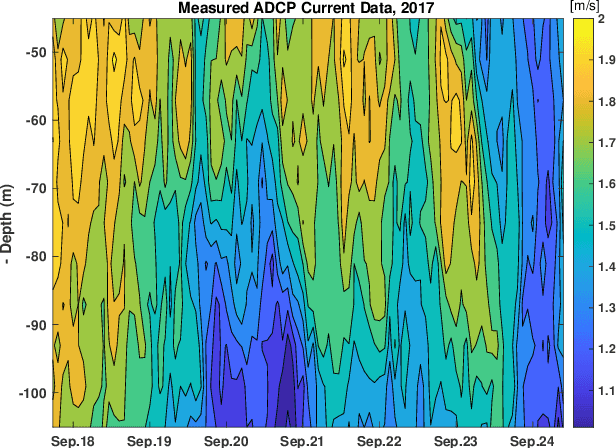
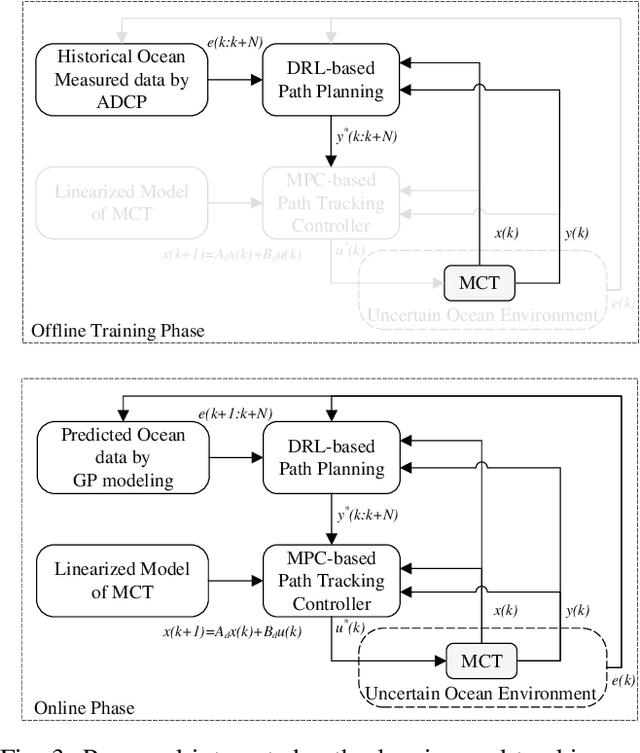

This paper presents an integrated path planning and tracking control of marine hydrokinetic energy harvesting devices. To address the highly nonlinear and uncertain oceanic environment, the path planner is designed based on a reinforcement learning (RL) approach by fully exploring the historical ocean current profiles. The planner will search for a path to optimize a chosen cost criterion, such as maximizing the total harvested energy for a given time. Model predictive control (MPC) is then utilized to design the tracking control for the optimal path command from the planner subject to problem constraints. The planner and the tracking control are accommodated in an integrated framework to optimize these two parts in a real-time manner. The proposed approach is validated on a marine current turbine (MCT) that executes vertical waypoint path searching to maximize the net power due to spatiotemporal uncertainties in the ocean environment, as well as the path following via an MPC tracking controller to navigate the MCT to the optimal path. Results demonstrate that the path planning increases harnessed power compared to the baseline (i.e., maintaining MCT at an equilibrium depth), and the tracking controller can successfully follow the reference path under different shear profiles.
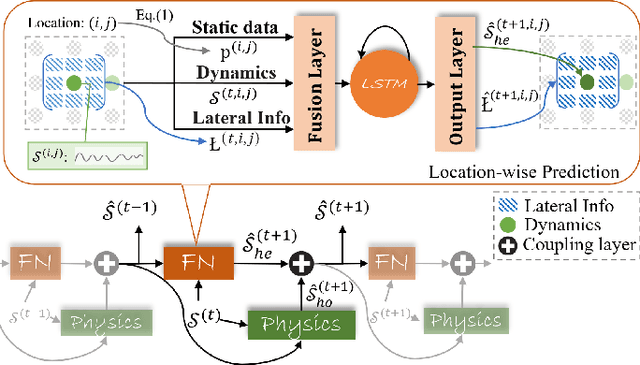
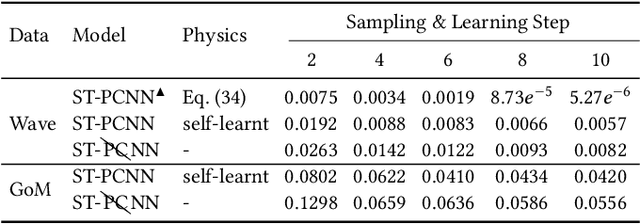
ST-PCNN: Spatio-Temporal Physics-Coupled Neural Networks for Dynamics Forecasting
Aug 12, 2021



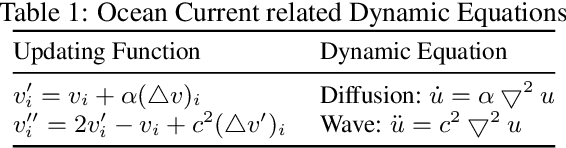
Ocean current, fluid mechanics, and many other spatio-temporal physical dynamical systems are essential components of the universe. One key characteristic of such systems is that certain physics laws -- represented as ordinary/partial differential equations (ODEs/PDEs) -- largely dominate the whole process, irrespective of time or location. Physics-informed learning has recently emerged to learn physics for accurate prediction, but they often lack a mechanism to leverage localized spatial and temporal correlation or rely on hard-coded physics parameters. In this paper, we advocate a physics-coupled neural network model to learn parameters governing the physics of the system, and further couple the learned physics to assist the learning of recurring dynamics. A spatio-temporal physics-coupled neural network (ST-PCNN) model is proposed to achieve three goals: (1) learning the underlying physics parameters, (2) transition of local information between spatio-temporal regions, and (3) forecasting future values for the dynamical system. The physics-coupled learning ensures that the proposed model can be tremendously improved by using learned physics parameters, and can achieve good long-range forecasting (e.g., more than 30-steps). Experiments, using simulated and field-collected ocean current data, validate that ST-PCNN outperforms existing physics-informed models.
Physics-Coupled Spatio-Temporal Active Learning for Dynamical Systems
Aug 11, 2021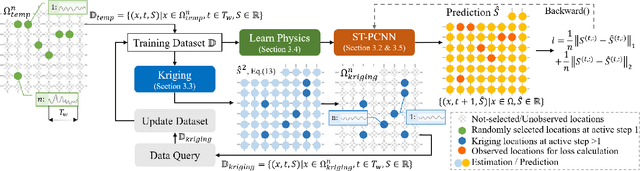
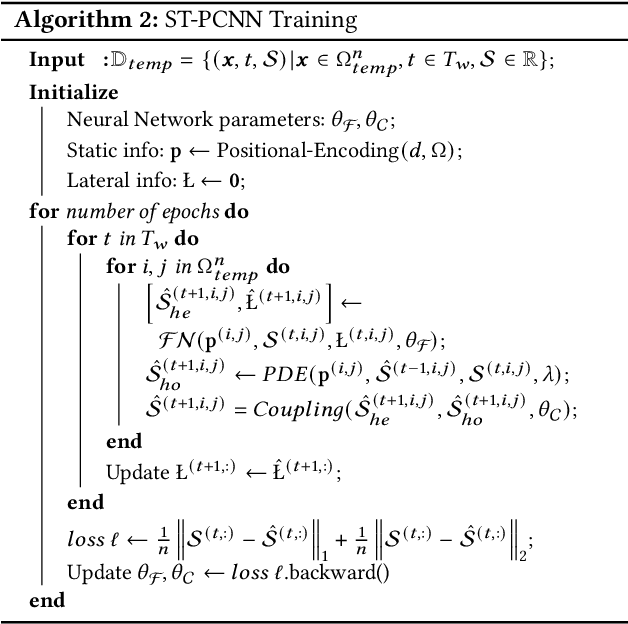
Spatio-temporal forecasting is of great importance in a wide range of dynamical systems applications from atmospheric science, to recent COVID-19 spread modeling. These applications rely on accurate predictions of spatio-temporal structured data reflecting real-world phenomena. A stunning characteristic is that the dynamical system is not only driven by some physics laws but also impacted by the localized factor in spatial and temporal regions. One of the major challenges is to infer the underlying causes, which generate the perceived data stream and propagate the involved causal dynamics through the distributed observing units. Another challenge is that the success of machine learning based predictive models requires massive annotated data for model training. However, the acquisition of high-quality annotated data is objectively manual and tedious as it needs a considerable amount of human intervention, making it infeasible in fields that require high levels of expertise. To tackle these challenges, we advocate a spatio-temporal physics-coupled neural networks (ST-PCNN) model to learn the underlying physics of the dynamical system and further couple the learned physics to assist the learning of the recurring dynamics. To deal with data-acquisition constraints, an active learning mechanism with Kriging for actively acquiring the most informative data is proposed for ST-PCNN training in a partially observable environment. Our experiments on both synthetic and real-world datasets exhibit that the proposed ST-PCNN with active learning converges to near optimal accuracy with substantially fewer instances.
Evolutionary Architecture Search for Graph Neural Networks
Sep 21, 2020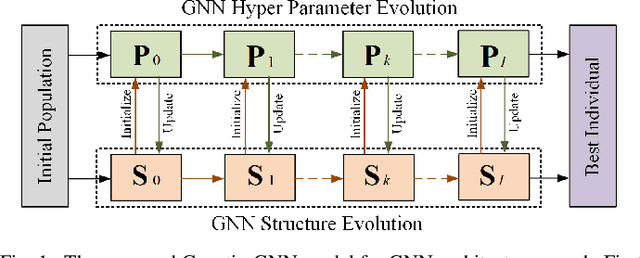
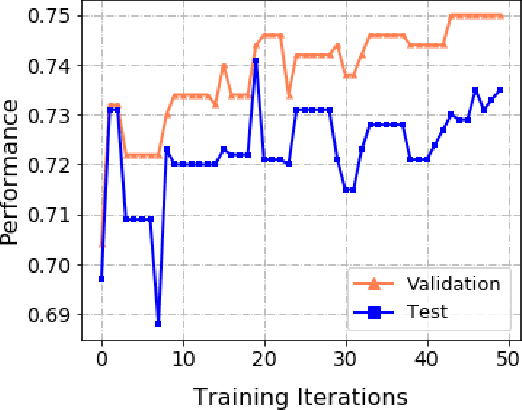
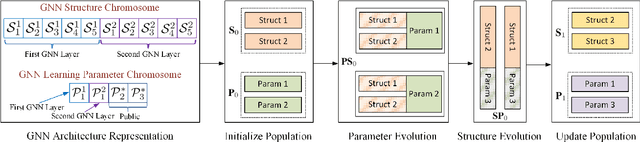
Automated machine learning (AutoML) has seen a resurgence in interest with the boom of deep learning over the past decade. In particular, Neural Architecture Search (NAS) has seen significant attention throughout the AutoML research community, and has pushed forward the state-of-the-art in a number of neural models to address grid-like data such as texts and images. However, very litter work has been done about Graph Neural Networks (GNN) learning on unstructured network data. Given the huge number of choices and combinations of components such as aggregator and activation function, determining the suitable GNN structure for a specific problem normally necessitates tremendous expert knowledge and laborious trails. In addition, the slight variation of hyper parameters such as learning rate and dropout rate could dramatically hurt the learning capacity of GNN. In this paper, we propose a novel AutoML framework through the evolution of individual models in a large GNN architecture space involving both neural structures and learning parameters. Instead of optimizing only the model structures with fixed parameter settings as existing work, an alternating evolution process is performed between GNN structures and learning parameters to dynamically find the best fit of each other. To the best of our knowledge, this is the first work to introduce and evaluate evolutionary architecture search for GNN models. Experiments and validations demonstrate that evolutionary NAS is capable of matching existing state-of-the-art reinforcement learning approaches for both the semi-supervised transductive and inductive node representation learning and classification.
Physics-informed Tensor-train ConvLSTM for Volumetric Velocity Forecasting
Aug 04, 2020


According to the National Academies, a weekly forecast of velocity, vertical structure, and duration of the Loop Current (LC) and its eddies is critical for understanding the oceanography and ecosystem, and for mitigating outcomes of anthropogenic and natural disasters in the Gulf of Mexico (GoM). However, this forecast is a challenging problem since the LC behaviour is dominated by long-range spatial connections across multiple timescales. In this paper, we extend spatiotemporal predictive learning, showing its effectiveness beyond video prediction, to a 4D model, i.e., a novel Physics-informed Tensor-train ConvLSTM (PITT-ConvLSTM) for temporal sequences of 3D geospatial data forecasting. Specifically, we propose 1) a novel 4D higher-order recurrent neural network with empirical orthogonal function analysis to capture the hidden uncorrelated patterns of each hierarchy, 2) a convolutional tensor-train decomposition to capture higher-order space-time correlations, and 3) to incorporate prior physic knowledge that is provided from domain experts by informing the learning in latent space. The advantage of our proposed method is clear: constrained by physical laws, it simultaneously learns good representations for frame dependencies (both short-term and long-term high-level dependency) and inter-hierarchical relations within each time frame. Experiments on geospatial data collected from the GoM demonstrate that PITT-ConvLSTM outperforms the state-of-the-art methods in forecasting the volumetric velocity of the LC and its eddies for a period of over one week.
Multi-Label Graph Convolutional Network Representation Learning
Dec 26, 2019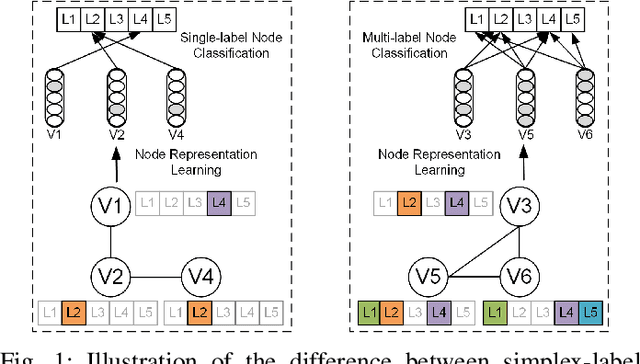
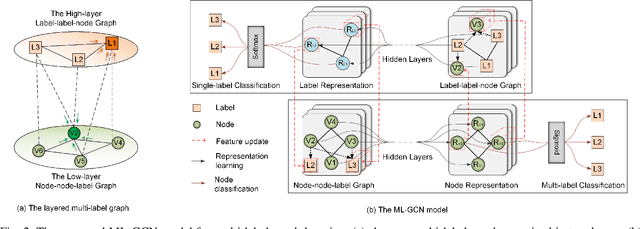
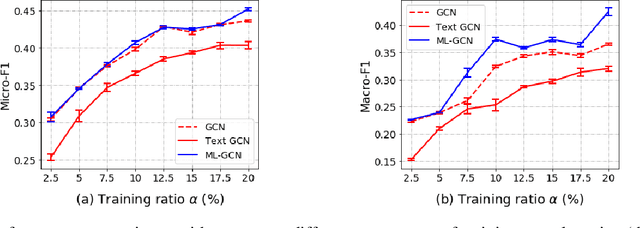
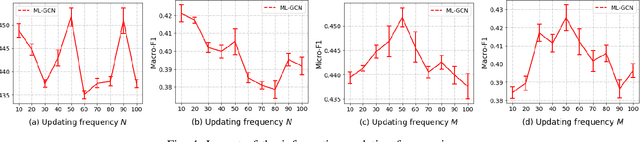
Knowledge representation of graph-based systems is fundamental across many disciplines. To date, most existing methods for representation learning primarily focus on networks with simplex labels, yet real-world objects (nodes) are inherently complex in nature and often contain rich semantics or labels, e.g., a user may belong to diverse interest groups of a social network, resulting in multi-label networks for many applications. The multi-label network nodes not only have multiple labels for each node, such labels are often highly correlated making existing methods ineffective or fail to handle such correlation for node representation learning. In this paper, we propose a novel multi-label graph convolutional network (ML-GCN) for learning node representation for multi-label networks. To fully explore label-label correlation and network topology structures, we propose to model a multi-label network as two Siamese GCNs: a node-node-label graph and a label-label-node graph. The two GCNs each handle one aspect of representation learning for nodes and labels, respectively, and they are seamlessly integrated under one objective function. The learned label representations can effectively preserve the inner-label interaction and node label properties, and are then aggregated to enhance the node representation learning under a unified training framework. Experiments and comparisons on multi-label node classification validate the effectiveness of our proposed approach.
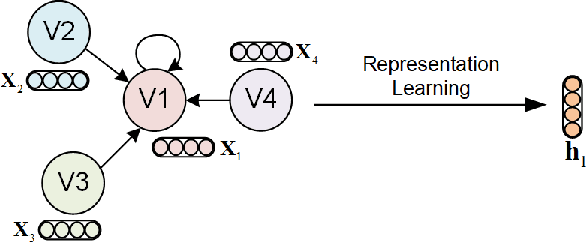
Feature-Attention Graph Convolutional Networks for Noise Resilient Learning
Dec 26, 2019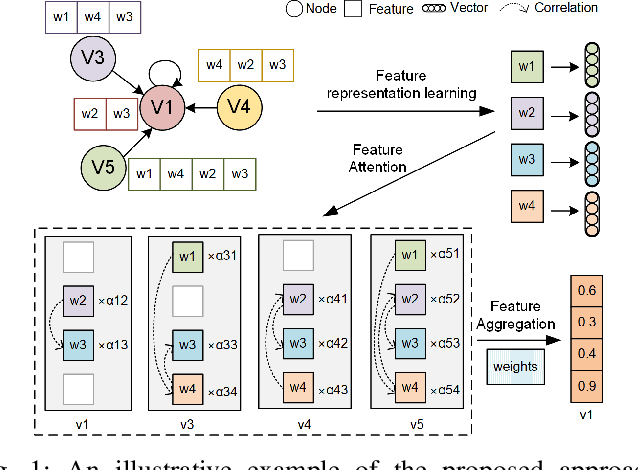
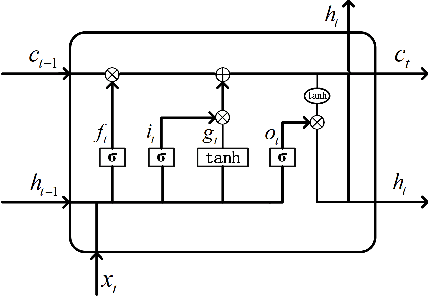
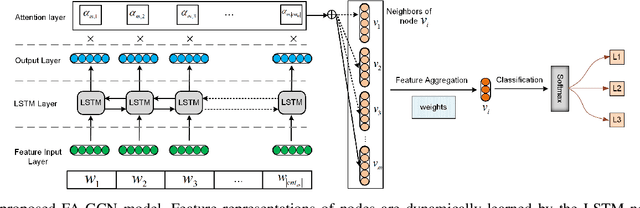
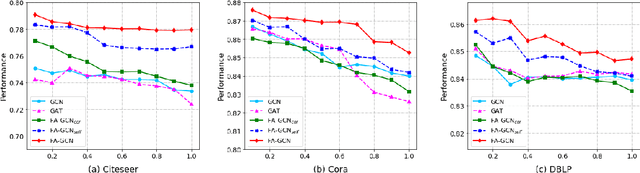
Noise and inconsistency commonly exist in real-world information networks, due to inherent error-prone nature of human or user privacy concerns. To date, tremendous efforts have been made to advance feature learning from networks, including the most recent Graph Convolutional Networks (GCN) or attention GCN, by integrating node content and topology structures. However, all existing methods consider networks as error-free sources and treat feature content in each node as independent and equally important to model node relations. The erroneous node content, combined with sparse features, provide essential challenges for existing methods to be used on real-world noisy networks. In this paper, we propose FA-GCN, a feature-attention graph convolution learning framework, to handle networks with noisy and sparse node content. To tackle noise and sparse content in each node, FA-GCN first employs a long short-term memory (LSTM) network to learn dense representation for each feature. To model interactions between neighboring nodes, a feature-attention mechanism is introduced to allow neighboring nodes learn and vary feature importance, with respect to their connections. By using spectral-based graph convolution aggregation process, each node is allowed to concentrate more on the most determining neighborhood features aligned with the corresponding learning task. Experiments and validations, w.r.t. different noise levels, demonstrate that FA-GCN achieves better performance than state-of-the-art methods on both noise-free and noisy networks.