 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrated Path Planning and Tracking Control of Marine Current Turbine in Uncertain Ocean Environments
Oct 14, 2021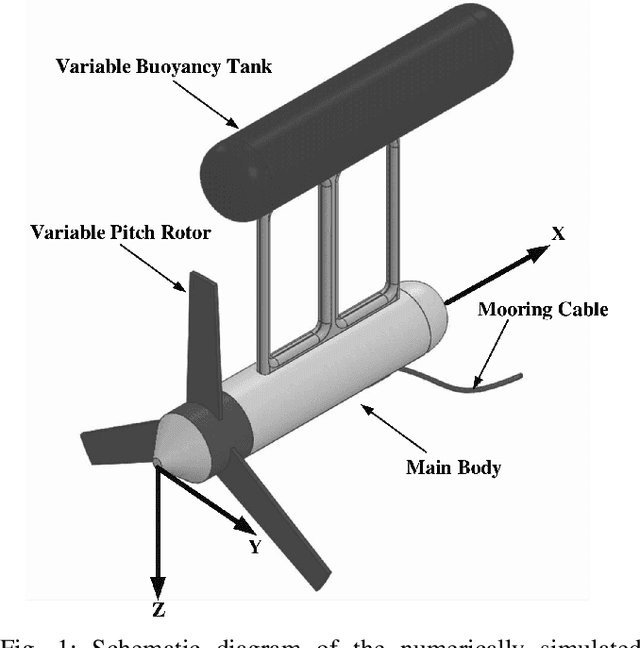
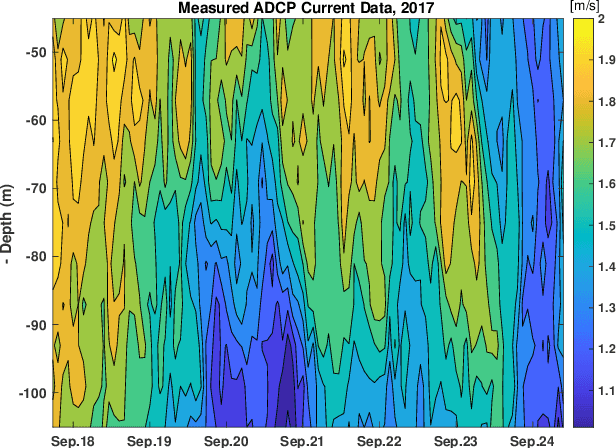
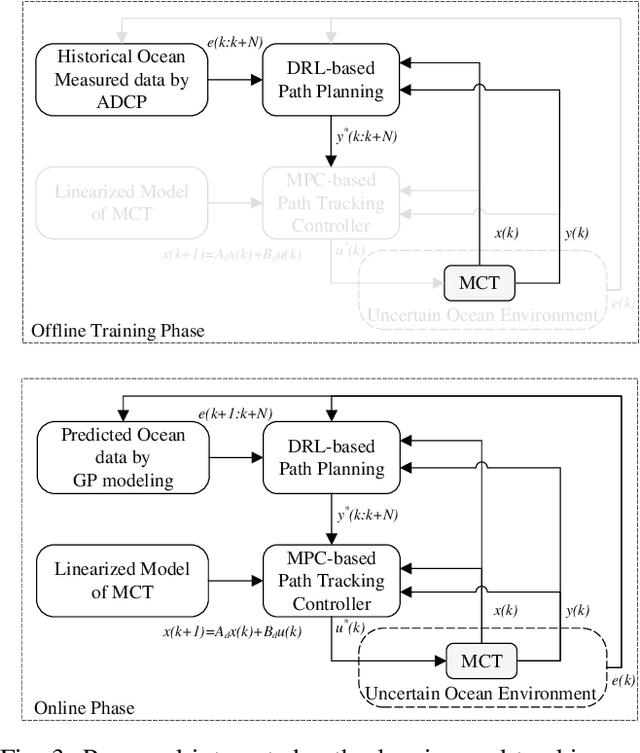

This paper presents an integrated path planning and tracking control of marine hydrokinetic energy harvesting devices. To address the highly nonlinear and uncertain oceanic environment, the path planner is designed based on a reinforcement learning (RL) approach by fully exploring the historical ocean current profiles. The planner will search for a path to optimize a chosen cost criterion, such as maximizing the total harvested energy for a given time. Model predictive control (MPC) is then utilized to design the tracking control for the optimal path command from the planner subject to problem constraints. The planner and the tracking control are accommodated in an integrated framework to optimize these two parts in a real-time manner. The proposed approach is validated on a marine current turbine (MCT) that executes vertical waypoint path searching to maximize the net power due to spatiotemporal uncertainties in the ocean environment, as well as the path following via an MPC tracking controller to navigate the MCT to the optimal path. Results demonstrate that the path planning increases harnessed power compared to the baseline (i.e., maintaining MCT at an equilibrium depth), and the tracking controller can successfully follow the reference path under different shear profiles.
ST-PCNN: Spatio-Temporal Physics-Coupled Neural Networks for Dynamics Forecasting
Aug 12, 2021



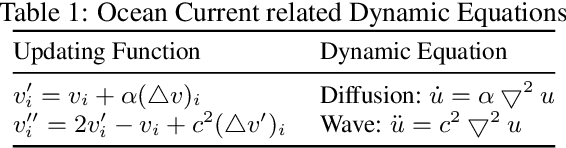
Ocean current, fluid mechanics, and many other spatio-temporal physical dynamical systems are essential components of the universe. One key characteristic of such systems is that certain physics laws -- represented as ordinary/partial differential equations (ODEs/PDEs) -- largely dominate the whole process, irrespective of time or location. Physics-informed learning has recently emerged to learn physics for accurate prediction, but they often lack a mechanism to leverage localized spatial and temporal correlation or rely on hard-coded physics parameters. In this paper, we advocate a physics-coupled neural network model to learn parameters governing the physics of the system, and further couple the learned physics to assist the learning of recurring dynamics. A spatio-temporal physics-coupled neural network (ST-PCNN) model is proposed to achieve three goals: (1) learning the underlying physics parameters, (2) transition of local information between spatio-temporal regions, and (3) forecasting future values for the dynamical system. The physics-coupled learning ensures that the proposed model can be tremendously improved by using learned physics parameters, and can achieve good long-range forecasting (e.g., more than 30-steps). Experiments, using simulated and field-collected ocean current data, validate that ST-PCNN outperforms existing physics-informed models.
Physics-informed Tensor-train ConvLSTM for Volumetric Velocity Forecasting
Aug 04, 2020


According to the National Academies, a weekly forecast of velocity, vertical structure, and duration of the Loop Current (LC) and its eddies is critical for understanding the oceanography and ecosystem, and for mitigating outcomes of anthropogenic and natural disasters in the Gulf of Mexico (GoM). However, this forecast is a challenging problem since the LC behaviour is dominated by long-range spatial connections across multiple timescales. In this paper, we extend spatiotemporal predictive learning, showing its effectiveness beyond video prediction, to a 4D model, i.e., a novel Physics-informed Tensor-train ConvLSTM (PITT-ConvLSTM) for temporal sequences of 3D geospatial data forecasting. Specifically, we propose 1) a novel 4D higher-order recurrent neural network with empirical orthogonal function analysis to capture the hidden uncorrelated patterns of each hierarchy, 2) a convolutional tensor-train decomposition to capture higher-order space-time correlations, and 3) to incorporate prior physic knowledge that is provided from domain experts by informing the learning in latent space. The advantage of our proposed method is clear: constrained by physical laws, it simultaneously learns good representations for frame dependencies (both short-term and long-term high-level dependency) and inter-hierarchical relations within each time frame. Experiments on geospatial data collected from the GoM demonstrate that PITT-ConvLSTM outperforms the state-of-the-art methods in forecasting the volumetric velocity of the LC and its eddies for a period of over one week.