 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrated Path Planning and Tracking Control of Marine Current Turbine in Uncertain Ocean Environments
Paper and Code
Oct 14, 2021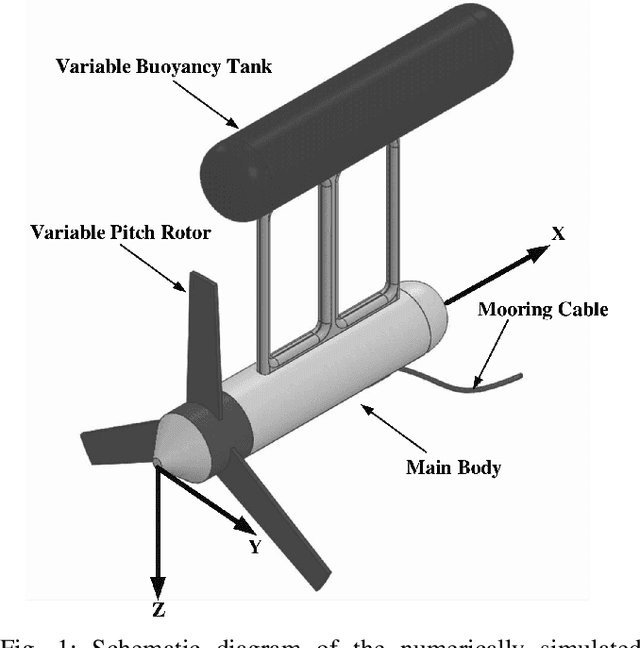
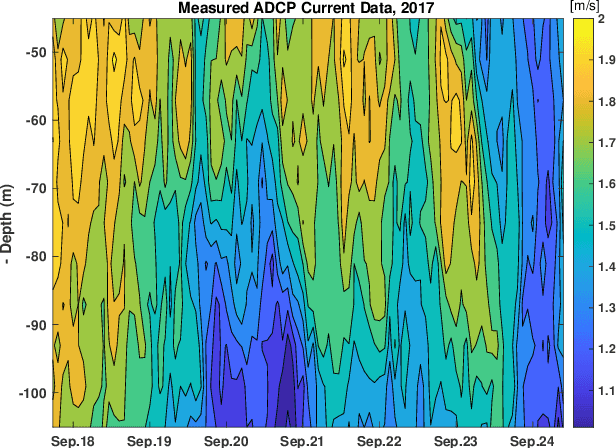
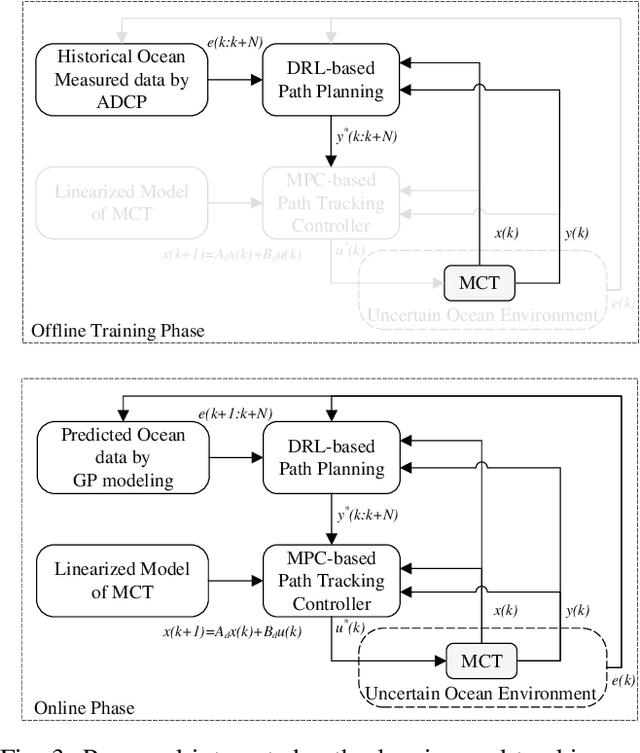

This paper presents an integrated path planning and tracking control of marine hydrokinetic energy harvesting devices. To address the highly nonlinear and uncertain oceanic environment, the path planner is designed based on a reinforcement learning (RL) approach by fully exploring the historical ocean current profiles. The planner will search for a path to optimize a chosen cost criterion, such as maximizing the total harvested energy for a given time. Model predictive control (MPC) is then utilized to design the tracking control for the optimal path command from the planner subject to problem constraints. The planner and the tracking control are accommodated in an integrated framework to optimize these two parts in a real-time manner. The proposed approach is validated on a marine current turbine (MCT) that executes vertical waypoint path searching to maximize the net power due to spatiotemporal uncertainties in the ocean environment, as well as the path following via an MPC tracking controller to navigate the MCT to the optimal path. Results demonstrate that the path planning increases harnessed power compared to the baseline (i.e., maintaining MCT at an equilibrium depth), and the tracking controller can successfully follow the reference path under different shear profiles.