 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultispectral airborne laser scanning for tree species classification: a benchmark of machine learning and deep learning algorithms
Apr 19, 2025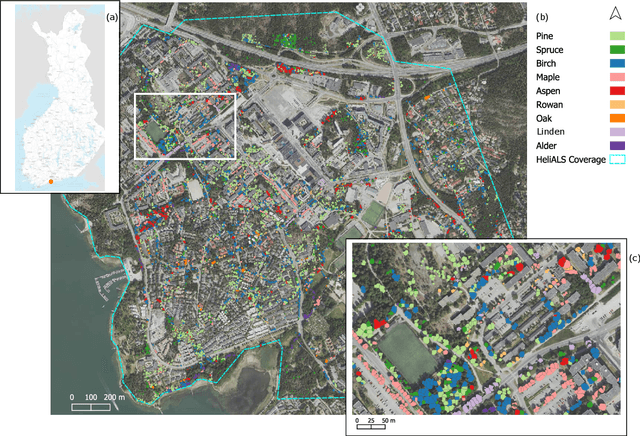
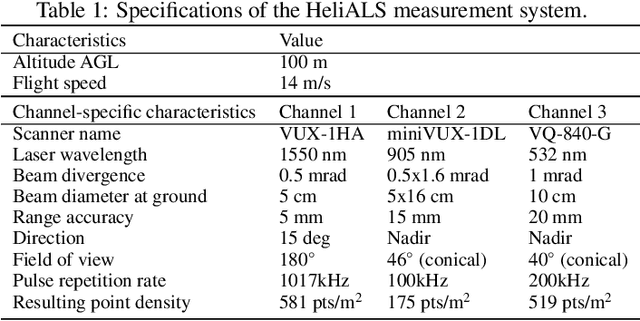
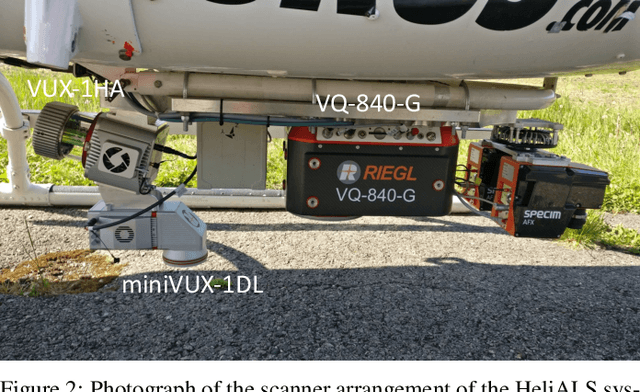
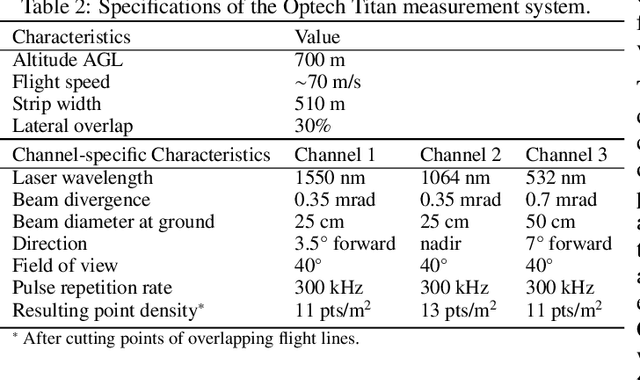
Climate-smart and biodiversity-preserving forestry demands precise information on forest resources, extending to the individual tree level. Multispectral airborne laser scanning (ALS) has shown promise in automated point cloud processing and tree segmentation, but challenges remain in identifying rare tree species and leveraging deep learning techniques. This study addresses these gaps by conducting a comprehensive benchmark of machine learning and deep learning methods for tree species classification. For the study, we collected high-density multispectral ALS data (>1000 pts/m$^2$) at three wavelengths using the FGI-developed HeliALS system, complemented by existing Optech Titan data (35 pts/m$^2$), to evaluate the species classification accuracy of various algorithms in a test site located in Southern Finland. Based on 5261 test segments, our findings demonstrate that point-based deep learning methods, particularly a point transformer model, outperformed traditional machine learning and image-based deep learning approaches on high-density multispectral point clouds. For the high-density ALS dataset, a point transformer model provided the best performance reaching an overall (macro-average) accuracy of 87.9% (74.5%) with a training set of 1065 segments and 92.0% (85.1%) with 5000 training segments. The best image-based deep learning method, DetailView, reached an overall (macro-average) accuracy of 84.3% (63.9%), whereas a random forest (RF) classifier achieved an overall (macro-average) accuracy of 83.2% (61.3%). Importantly, the overall classification accuracy of the point transformer model on the HeliALS data increased from 73.0% with no spectral information to 84.7% with single-channel reflectance, and to 87.9% with spectral information of all the three channels.
3D-SeqMOS: A Novel Sequential 3D Moving Object Segmentation in Autonomous Driving
Jul 18, 2023
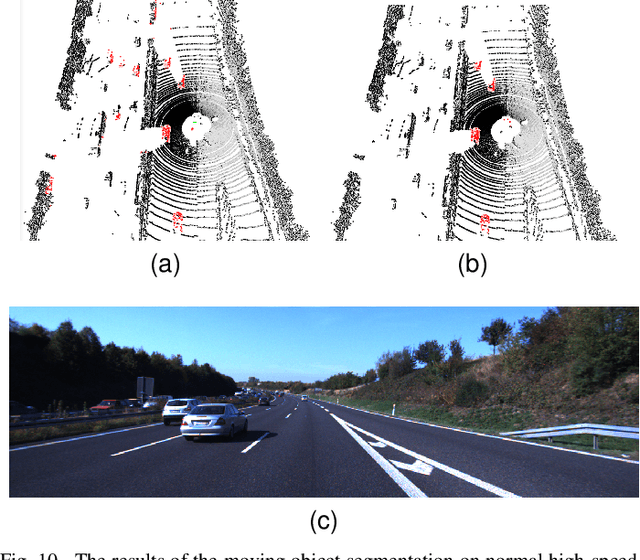
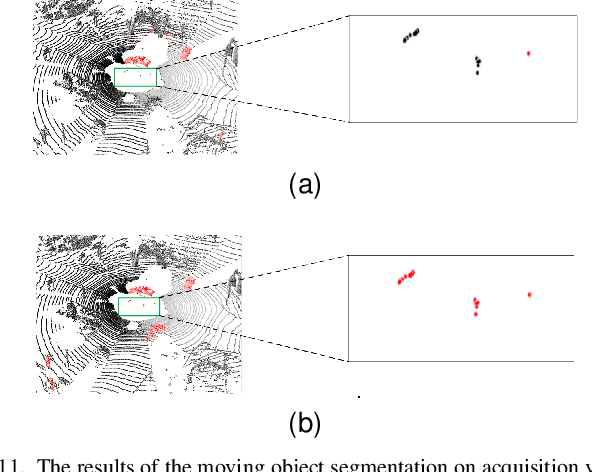
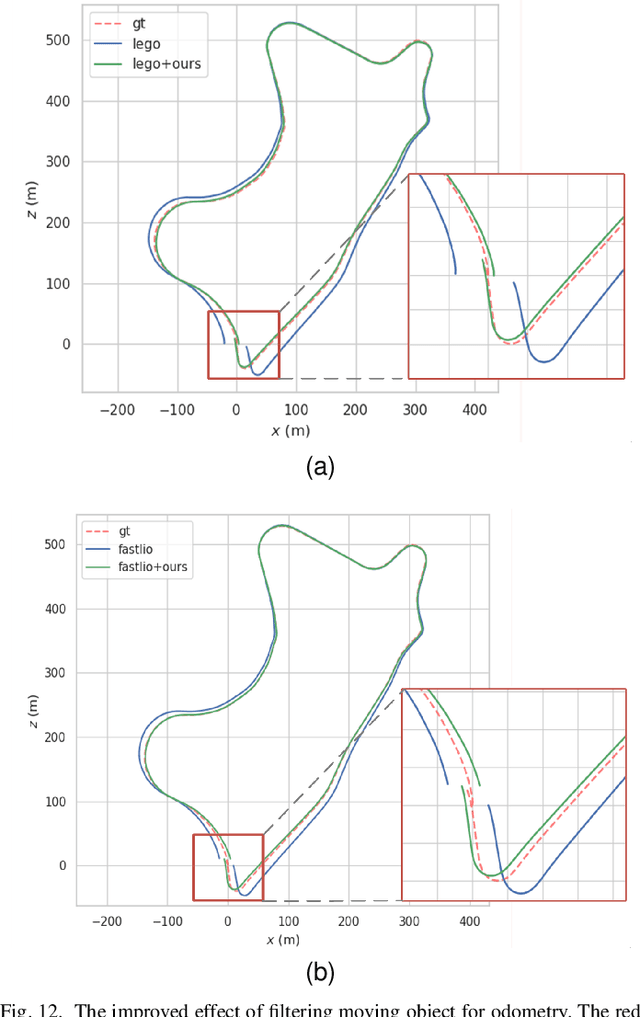
For the SLAM system in robotics and autonomous driving, the accuracy of front-end odometry and back-end loop-closure detection determine the whole intelligent system performance. But the LiDAR-SLAM could be disturbed by current scene moving objects, resulting in drift errors and even loop-closure failure. Thus, the ability to detect and segment moving objects is essential for high-precision positioning and building a consistent map. In this paper, we address the problem of moving object segmentation from 3D LiDAR scans to improve the odometry and loop-closure accuracy of SLAM. We propose a novel 3D Sequential Moving-Object-Segmentation (3D-SeqMOS) method that can accurately segment the scene into moving and static objects, such as moving and static cars. Different from the existing projected-image method, we process the raw 3D point cloud and build a 3D convolution neural network for MOS task. In addition, to make full use of the spatio-temporal information of point cloud, we propose a point cloud residual mechanism using the spatial features of current scan and the temporal features of previous residual scans. Besides, we build a complete SLAM framework to verify the effectiveness and accuracy of 3D-SeqMOS. Experiments on SemanticKITTI dataset show that our proposed 3D-SeqMOS method can effectively detect moving objects and improve the accuracy of LiDAR odometry and loop-closure detection. The test results show our 3D-SeqMOS outperforms the state-of-the-art method by 12.4%. We extend the proposed method to the SemanticKITTI: Moving Object Segmentation competition and achieve the 2nd in the leaderboard, showing its effectiveness.
CAE-LO: LiDAR Odometry Leveraging Fully Unsupervised Convolutional Auto-Encoder for Interest Point Detection and Feature Description
Jan 12, 2020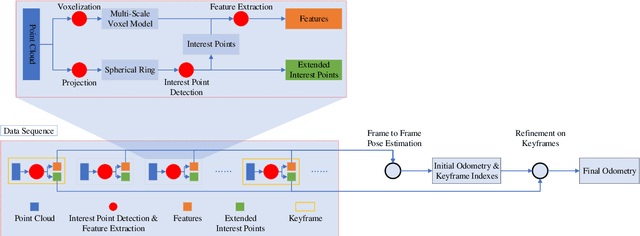
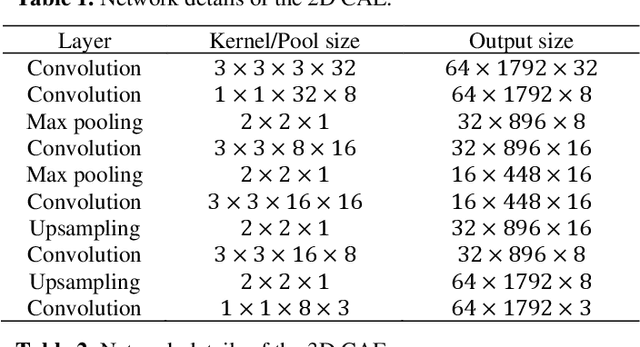
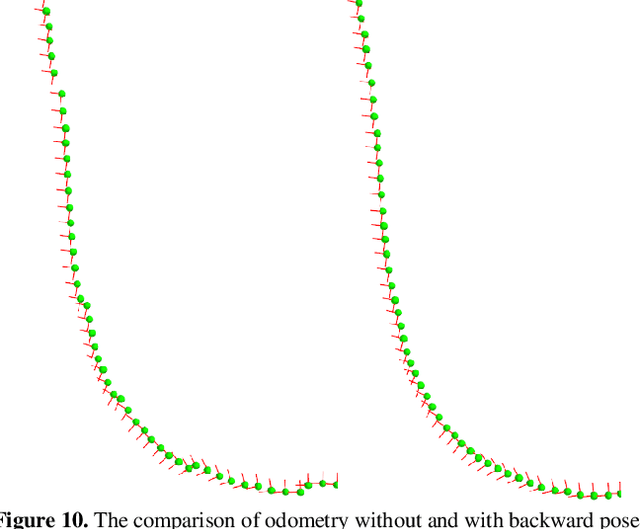
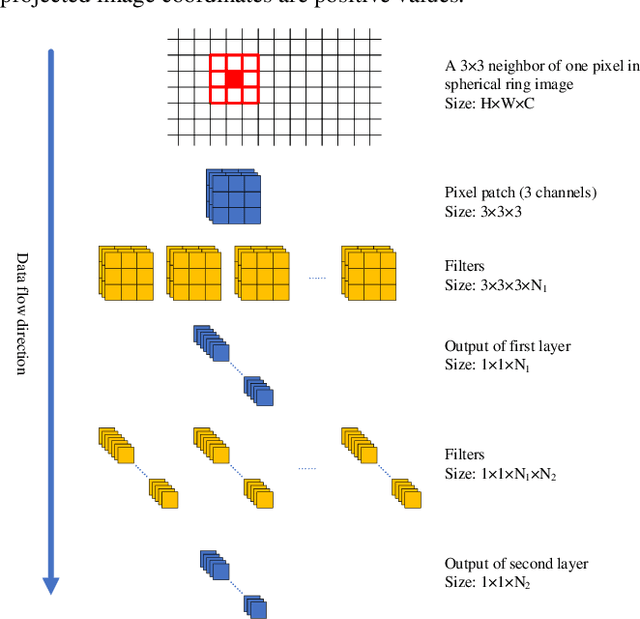
As an important technology in 3D mapping, autonomous driving, and robot navigation, LiDAR odometry is still a challenging task. Appropriate data structure and unsupervised deep learning are the keys to achieve an easy adjusted LiDAR odometry solution with high performance. Utilizing compact 2D structured spherical ring projection model and voxel model which preserves the original shape of input data, we propose a fully unsupervised Convolutional Auto-Encoder based LiDAR Odometry (CAE-LO) that detects interest points from spherical ring data using 2D CAE and extracts features from multi-resolution voxel model using 3D CAE. We make several key contributions: 1) experiments based on KITTI dataset show that our interest points can capture more local details to improve the matching success rate on unstructured scenarios and our features outperform state-of-the-art by more than 50% in matching inlier ratio; 2) besides, we also propose a keyframe selection method based on matching pairs transferring, an odometry refinement method for keyframes based on extended interest points from spherical rings, and a backward pose update method. The odometry refinement experiments verify the proposed ideas' feasibility and effectiveness.