 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Language Models as Optimization Controllers: Adaptive Continuation for SIMP Topology Optimization
Mar 26, 2026We present a framework in which a large language model (LLM) acts as an online adaptive controller for SIMP topology optimization, replacing conventional fixed-schedule continuation with real-time, state-conditioned parameter decisions. At every $k$-th iteration, the LLM receives a structured observation$-$current compliance, grayness index, stagnation counter, checkerboard measure, volume fraction, and budget consumption$-$and outputs numerical values for the penalization exponent $p$, projection sharpness $β$, filter radius $r_{\min}$, and move limit $δ$ via a Direct Numeric Control interface. A hard grayness gate prevents premature binarization, and a meta-optimization loop uses a second LLM pass to tune the agent's call frequency and gate threshold across runs. We benchmark the agent against four baselines$-$fixed (no-continuation), standard three-field continuation, an expert heuristic, and a schedule-only ablation$-$on three 2-D problems (cantilever, MBB beam, L-bracket) at $120\!\times\!60$ resolution and two 3-D problems (cantilever, MBB beam) at $40\!\times\!20\!\times\!10$ resolution, all run for 300 iterations. A standardized 40-iteration sharpening tail is applied from the best valid snapshot so that compliance differences reflect only the exploration phase. The LLM agent achieves the lowest final compliance on every benchmark: $-5.7\%$ to $-18.1\%$ relative to the fixed baseline, with all solutions fully binary. The schedule-only ablation underperforms the fixed baseline on two of three problems, confirming that the LLM's real-time intervention$-$not the schedule geometry$-$drives the gain. Code and reproduction scripts will be released upon publication.
Prometheus Chatbot: Knowledge Graph Collaborative Large Language Model for Computer Components Recommendation
Jul 29, 2024
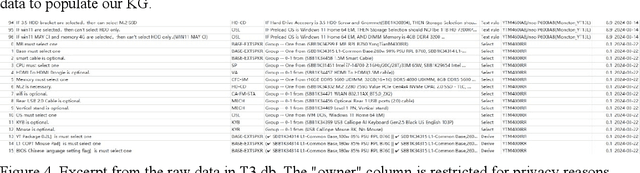
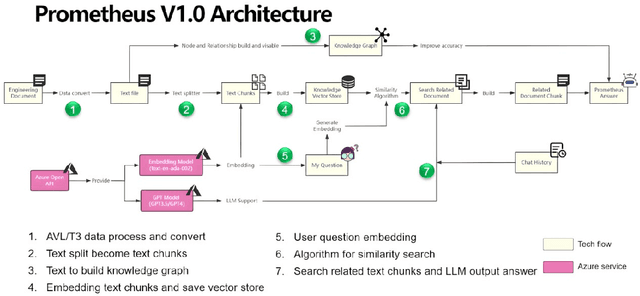
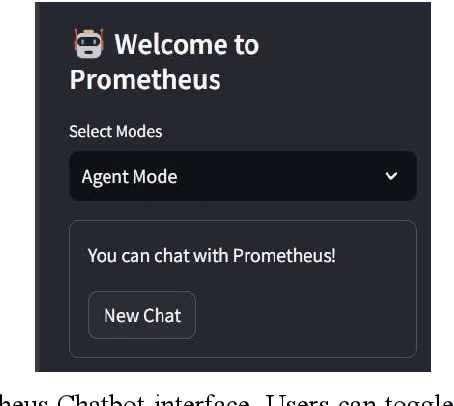
Knowledge graphs (KGs) are essential in applications such as network alignment, question-answering, and recommender systems (RSs) since they offer structured relational data that facilitate the inference of indirect relationships. However, the development of KG-based RSs capable of processing user inputs in natural language faces significant challenges. Firstly, natural language processing units must effectively handle the ambiguity and variability in human language to interpret user intents accurately. Secondly, the system must precisely identify and link entities, like product names, to their corresponding nodes in KGs. To overcome these challenges, supported by Lenovo, we developed a novel chatbot called "Prometheus," which integrates a KG with a large language model (LLM), specifically designed for recommending computer components. This chatbot can accurately decode user requests and deliver personalized recommendations derived from KGs, ensuring precise comprehension and response to their computer setup needs.
CAE-LO: LiDAR Odometry Leveraging Fully Unsupervised Convolutional Auto-Encoder for Interest Point Detection and Feature Description
Jan 12, 2020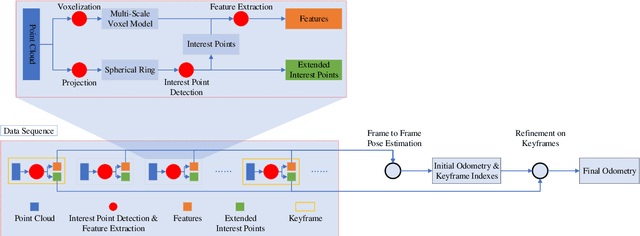
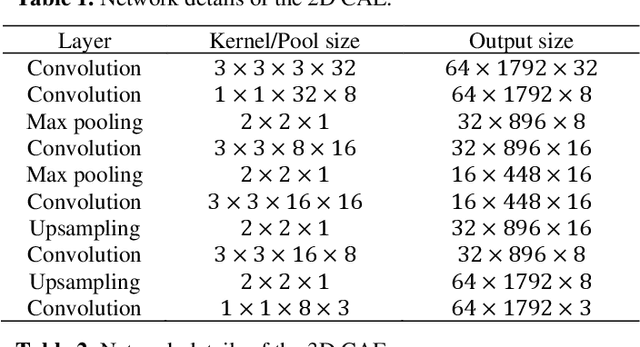
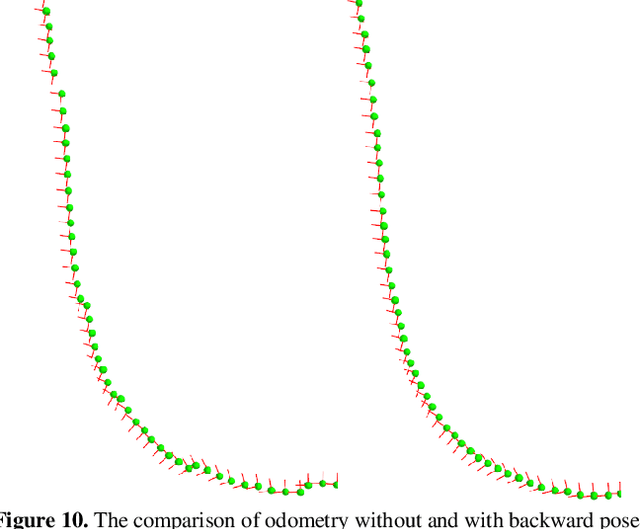
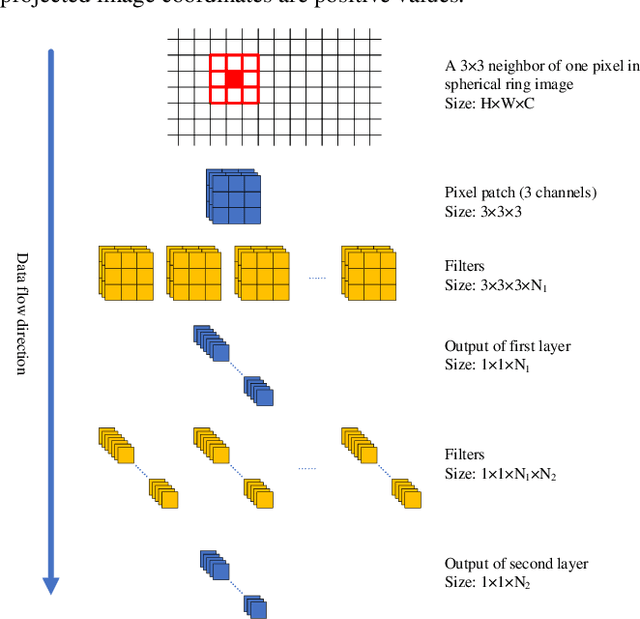
As an important technology in 3D mapping, autonomous driving, and robot navigation, LiDAR odometry is still a challenging task. Appropriate data structure and unsupervised deep learning are the keys to achieve an easy adjusted LiDAR odometry solution with high performance. Utilizing compact 2D structured spherical ring projection model and voxel model which preserves the original shape of input data, we propose a fully unsupervised Convolutional Auto-Encoder based LiDAR Odometry (CAE-LO) that detects interest points from spherical ring data using 2D CAE and extracts features from multi-resolution voxel model using 3D CAE. We make several key contributions: 1) experiments based on KITTI dataset show that our interest points can capture more local details to improve the matching success rate on unstructured scenarios and our features outperform state-of-the-art by more than 50% in matching inlier ratio; 2) besides, we also propose a keyframe selection method based on matching pairs transferring, an odometry refinement method for keyframes based on extended interest points from spherical rings, and a backward pose update method. The odometry refinement experiments verify the proposed ideas' feasibility and effectiveness.