 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Deep-Learning Usability Expansion Model of Ocean Observations
Jun 03, 2022
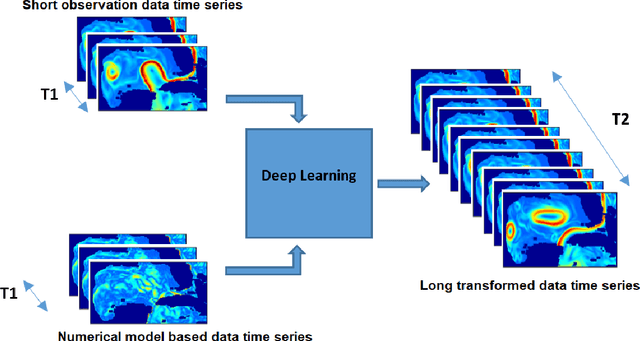
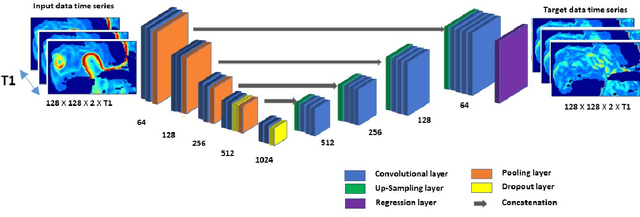
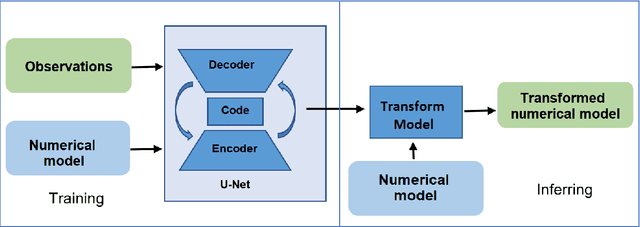
Today's ocean numerical prediction skills depend on the availability of in-situ and remote ocean observations at the time of the predictions only. Because observations are scarce and discontinuous in time and space, numerical models are often unable to accurately model and predict real ocean dynamics, leading to a lack of fulfillment of a range of services that require reliable predictions at various temporal and spatial scales. The process of constraining free numerical models with observations is known as data assimilation. The primary objective is to minimize the misfit of model states with the observations while respecting the rules of physics. The caveat of this approach is that measurements are used only once, at the time of the prediction. The information contained in the history of the measurements and its role in the determinism of the prediction is, therefore, not accounted for. Consequently, historical measurement cannot be used in real-time forecasting systems. The research presented in this paper provides a novel approach rooted in artificial intelligence to expand the usability of observations made before the time of the prediction. Our approach is based on the re-purpose of an existing deep learning model, called U-Net, designed specifically for image segmentation analysis in the biomedical field. U-Net is used here to create a Transform Model that retains the temporal and spatial evolution of the differences between model and observations to produce a correction in the form of regression weights that evolves spatially and temporally with the model both forward and backward in time, beyond the observation period. Using virtual observations, we show that the usability of the observation can be extended up to a one year prior or post observations.
Physics-Coupled Spatio-Temporal Active Learning for Dynamical Systems
Aug 11, 2021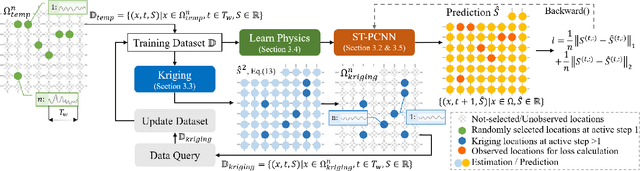
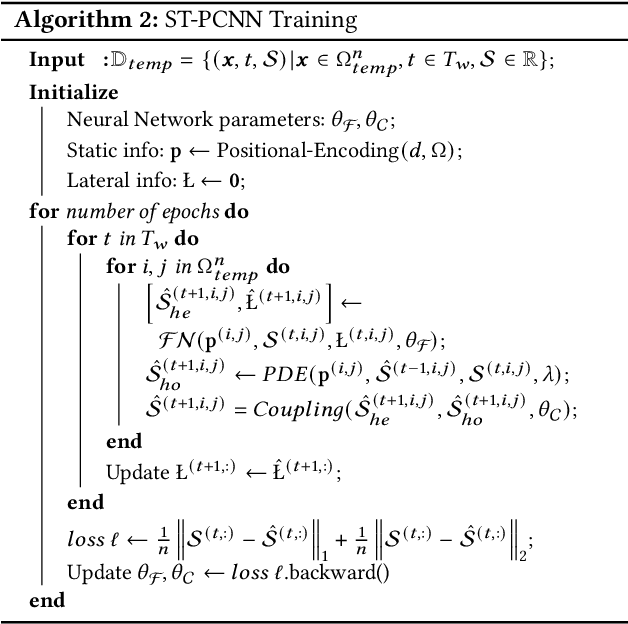
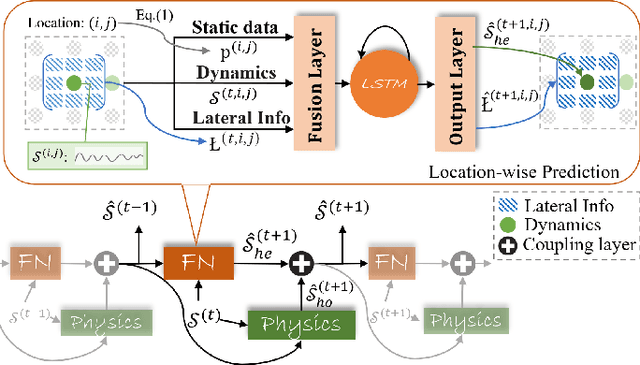
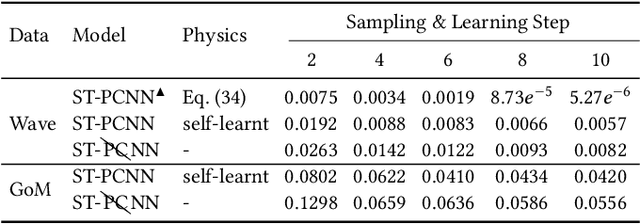
Spatio-temporal forecasting is of great importance in a wide range of dynamical systems applications from atmospheric science, to recent COVID-19 spread modeling. These applications rely on accurate predictions of spatio-temporal structured data reflecting real-world phenomena. A stunning characteristic is that the dynamical system is not only driven by some physics laws but also impacted by the localized factor in spatial and temporal regions. One of the major challenges is to infer the underlying causes, which generate the perceived data stream and propagate the involved causal dynamics through the distributed observing units. Another challenge is that the success of machine learning based predictive models requires massive annotated data for model training. However, the acquisition of high-quality annotated data is objectively manual and tedious as it needs a considerable amount of human intervention, making it infeasible in fields that require high levels of expertise. To tackle these challenges, we advocate a spatio-temporal physics-coupled neural networks (ST-PCNN) model to learn the underlying physics of the dynamical system and further couple the learned physics to assist the learning of the recurring dynamics. To deal with data-acquisition constraints, an active learning mechanism with Kriging for actively acquiring the most informative data is proposed for ST-PCNN training in a partially observable environment. Our experiments on both synthetic and real-world datasets exhibit that the proposed ST-PCNN with active learning converges to near optimal accuracy with substantially fewer instances.