 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCounterfactual Inference for Eliminating Sentiment Bias in Recommender Systems
May 06, 2025Recommender Systems (RSs) aim to provide personalized recommendations for users. A newly discovered bias, known as sentiment bias, uncovers a common phenomenon within Review-based RSs (RRSs): the recommendation accuracy of users or items with negative reviews deteriorates compared with users or items with positive reviews. Critical users and niche items are disadvantaged by such unfair recommendations. We study this problem from the perspective of counterfactual inference with two stages. At the model training stage, we build a causal graph and model how sentiment influences the final rating score. During the inference stage, we decouple the direct and indirect effects to mitigate the impact of sentiment bias and remove the indirect effect using counterfactual inference. We have conducted extensive experiments, and the results validate that our model can achieve comparable performance on rating prediction for better recommendations and effective mitigation of sentiment bias. To the best of our knowledge, this is the first work to employ counterfactual inference on sentiment bias mitigation in RSs.
Causality-Aware Transformer Networks for Robotic Navigation
Sep 04, 2024



Recent advances in machine learning algorithms have garnered growing interest in developing versatile Embodied AI systems. However, current research in this domain reveals opportunities for improvement. First, the direct adoption of RNNs and Transformers often overlooks the specific differences between Embodied AI and traditional sequential data modelling, potentially limiting its performance in Embodied AI tasks. Second, the reliance on task-specific configurations, such as pre-trained modules and dataset-specific logic, compromises the generalizability of these methods. We address these constraints by initially exploring the unique differences between Embodied AI tasks and other sequential data tasks through the lens of Causality, presenting a causal framework to elucidate the inadequacies of conventional sequential methods for Embodied AI. By leveraging this causal perspective, we propose Causality-Aware Transformer (CAT) Networks for Navigation, featuring a Causal Understanding Module to enhance the models's Environmental Understanding capability. Meanwhile, our method is devoid of task-specific inductive biases and can be trained in an End-to-End manner, which enhances the method's generalizability across various contexts. Empirical evaluations demonstrate that our methodology consistently surpasses benchmark performances across a spectrum of settings, tasks and simulation environments. Extensive ablation studies reveal that the performance gains can be attributed to the Causal Understanding Module, which demonstrates effectiveness and efficiency in both Reinforcement Learning and Supervised Learning settings.
Multi-agent Traffic Prediction via Denoised Endpoint Distribution
May 11, 2024



The exploration of high-speed movement by robots or road traffic agents is crucial for autonomous driving and navigation. Trajectory prediction at high speeds requires considering historical features and interactions with surrounding entities, a complexity not as pronounced in lower-speed environments. Prior methods have assessed the spatio-temporal dynamics of agents but often neglected intrinsic intent and uncertainty, thereby limiting their effectiveness. We present the Denoised Endpoint Distribution model for trajectory prediction, which distinctively models agents' spatio-temporal features alongside their intrinsic intentions and uncertainties. By employing Diffusion and Transformer models to focus on agent endpoints rather than entire trajectories, our approach significantly reduces model complexity and enhances performance through endpoint information. Our experiments on open datasets, coupled with comparison and ablation studies, demonstrate our model's efficacy and the importance of its components. This approach advances trajectory prediction in high-speed scenarios and lays groundwork for future developments.
Reinforcement Learning for Generative AI: A Survey
Aug 29, 2023



Deep Generative AI has been a long-standing essential topic in the machine learning community, which can impact a number of application areas like text generation and computer vision. The major paradigm to train a generative model is maximum likelihood estimation, which pushes the learner to capture and approximate the target data distribution by decreasing the divergence between the model distribution and the target distribution. This formulation successfully establishes the objective of generative tasks, while it is incapable of satisfying all the requirements that a user might expect from a generative model. Reinforcement learning, serving as a competitive option to inject new training signals by creating new objectives that exploit novel signals, has demonstrated its power and flexibility to incorporate human inductive bias from multiple angles, such as adversarial learning, hand-designed rules and learned reward model to build a performant model. Thereby, reinforcement learning has become a trending research field and has stretched the limits of generative AI in both model design and application. It is reasonable to summarize and conclude advances in recent years with a comprehensive review. Although there are surveys in different application areas recently, this survey aims to shed light on a high-level review that spans a range of application areas. We provide a rigorous taxonomy in this area and make sufficient coverage on various models and applications. Notably, we also surveyed the fast-developing large language model area. We conclude this survey by showing the potential directions that might tackle the limit of current models and expand the frontiers for generative AI.
Guided Image-to-Image Translation by Discriminator-Generator Communication
Mar 07, 2023



The goal of Image-to-image (I2I) translation is to transfer an image from a source domain to a target domain, which has recently drawn increasing attention. One major branch of this research is to formulate I2I translation based on Generative Adversarial Network (GAN). As a zero-sum game, GAN can be reformulated as a Partially-observed Markov Decision Process (POMDP) for generators, where generators cannot access full state information of their environments. This formulation illustrates the information insufficiency in the GAN training. To mitigate this problem, we propose to add a communication channel between discriminators and generators. We explore multiple architecture designs to integrate the communication mechanism into the I2I translation framework. To validate the performance of the proposed approach, we have conducted extensive experiments on various benchmark datasets. The experimental results confirm the superiority of our proposed method.
Adversarial Robustness of Deep Reinforcement Learning based Dynamic Recommender Systems
Dec 02, 2021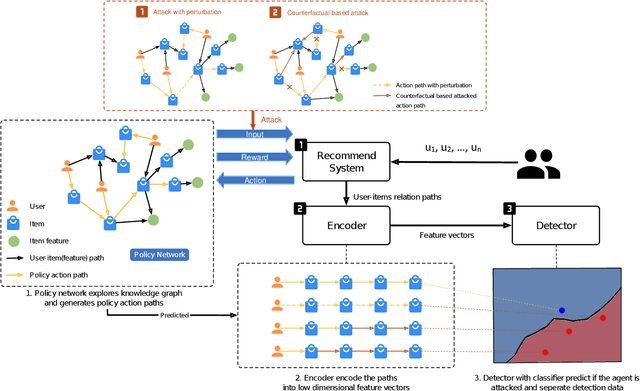
Adversarial attacks, e.g., adversarial perturbations of the input and adversarial samples, pose significant challenges to machine learning and deep learning techniques, including interactive recommendation systems. The latent embedding space of those techniques makes adversarial attacks difficult to detect at an early stage. Recent advance in causality shows that counterfactual can also be considered one of ways to generate the adversarial samples drawn from different distribution as the training samples. We propose to explore adversarial examples and attack agnostic detection on reinforcement learning-based interactive recommendation systems. We first craft different types of adversarial examples by adding perturbations to the input and intervening on the casual factors. Then, we augment recommendation systems by detecting potential attacks with a deep learning-based classifier based on the crafted data. Finally, we study the attack strength and frequency of adversarial examples and evaluate our model on standard datasets with multiple crafting methods. Our extensive experiments show that most adversarial attacks are effective, and both attack strength and attack frequency impact the attack performance. The strategically-timed attack achieves comparative attack performance with only 1/3 to 1/2 attack frequency. Besides, our black-box detector trained with one crafting method has the generalization ability over several other crafting methods.
Adversarial Attacks and Detection on Reinforcement Learning-Based Interactive Recommender Systems
Jun 14, 2020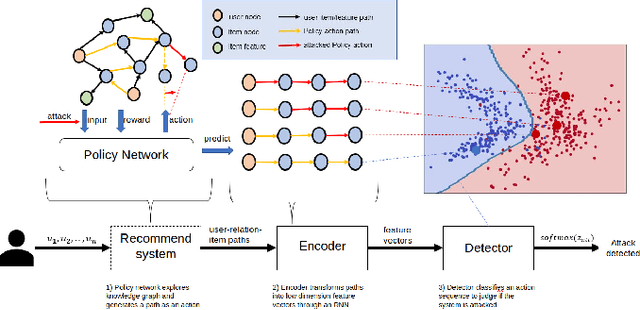
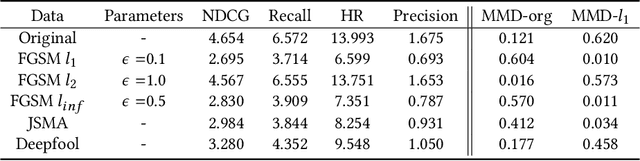
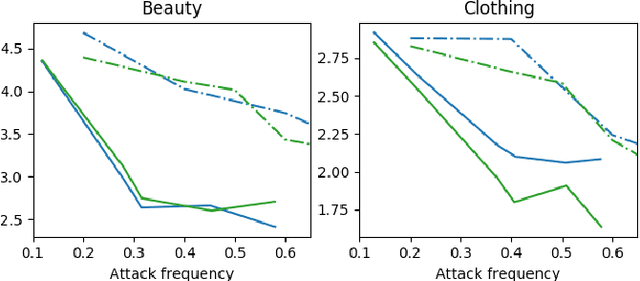
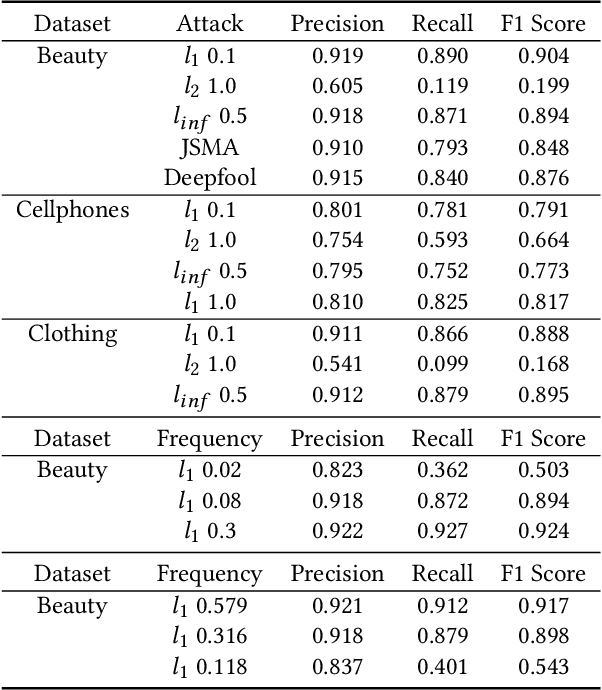
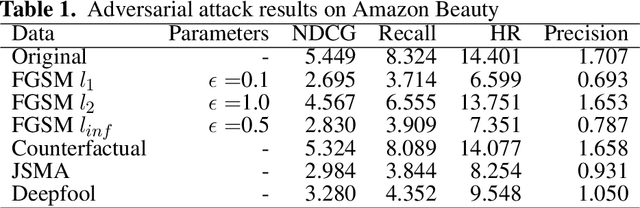
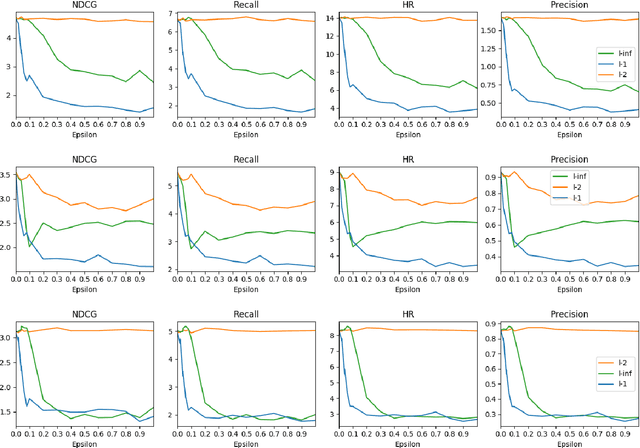
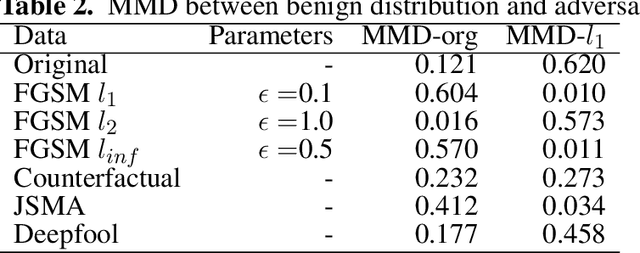
Adversarial attacks pose significant challenges for detecting adversarial attacks at an early stage. We propose attack-agnostic detection on reinforcement learning-based interactive recommendation systems. We first craft adversarial examples to show their diverse distributions and then augment recommendation systems by detecting potential attacks with a deep learning-based classifier based on the crafted data. Finally, we study the attack strength and frequency of adversarial examples and evaluate our model on standard datasets with multiple crafting methods. Our extensive experiments show that most adversarial attacks are effective, and both attack strength and attack frequency impact the attack performance. The strategically-timed attack achieves comparative attack performance with only 1/3 to 1/2 attack frequency. Besides, our black-box detector trained with one crafting method has the generalization ability over several crafting methods.