 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCounterfactual Inference for Eliminating Sentiment Bias in Recommender Systems
May 06, 2025Recommender Systems (RSs) aim to provide personalized recommendations for users. A newly discovered bias, known as sentiment bias, uncovers a common phenomenon within Review-based RSs (RRSs): the recommendation accuracy of users or items with negative reviews deteriorates compared with users or items with positive reviews. Critical users and niche items are disadvantaged by such unfair recommendations. We study this problem from the perspective of counterfactual inference with two stages. At the model training stage, we build a causal graph and model how sentiment influences the final rating score. During the inference stage, we decouple the direct and indirect effects to mitigate the impact of sentiment bias and remove the indirect effect using counterfactual inference. We have conducted extensive experiments, and the results validate that our model can achieve comparable performance on rating prediction for better recommendations and effective mitigation of sentiment bias. To the best of our knowledge, this is the first work to employ counterfactual inference on sentiment bias mitigation in RSs.
Guided Image-to-Image Translation by Discriminator-Generator Communication
Mar 07, 2023



The goal of Image-to-image (I2I) translation is to transfer an image from a source domain to a target domain, which has recently drawn increasing attention. One major branch of this research is to formulate I2I translation based on Generative Adversarial Network (GAN). As a zero-sum game, GAN can be reformulated as a Partially-observed Markov Decision Process (POMDP) for generators, where generators cannot access full state information of their environments. This formulation illustrates the information insufficiency in the GAN training. To mitigate this problem, we propose to add a communication channel between discriminators and generators. We explore multiple architecture designs to integrate the communication mechanism into the I2I translation framework. To validate the performance of the proposed approach, we have conducted extensive experiments on various benchmark datasets. The experimental results confirm the superiority of our proposed method.
A family of virtual contraction based controllers for tracking of flexible-joints port-Hamiltonian robots: theory and experiments
Feb 04, 2020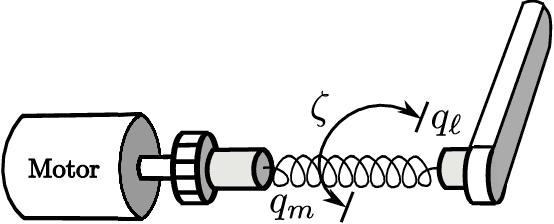
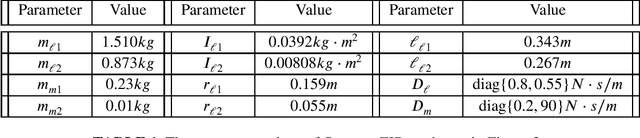
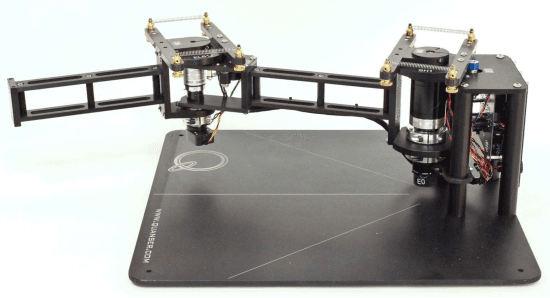
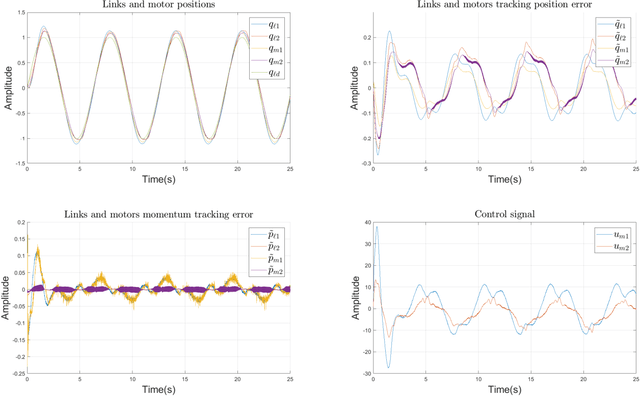
In this work we present a constructive method to design a family of virtual contraction based controllers that solve the standard trajectory tracking problem of flexible-joint robots (FJRs) in the port-Hamiltonian (pH) framework. The proposed design method, called virtual contraction based control (v-CBC), combines the concepts of virtual control systems and contraction analysis. It is shown that under potential energy matching conditions, the closed-loop virtual system is contractive and exponential convergence to a predefined trajectory is guaranteed. Moreover, the closed-loop virtual system exhibits properties such as structure preservation, differential passivity and the existence of (incrementally) passive maps.