Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA family of virtual contraction based controllers for tracking of flexible-joints port-Hamiltonian robots: theory and experiments
Feb 04, 2020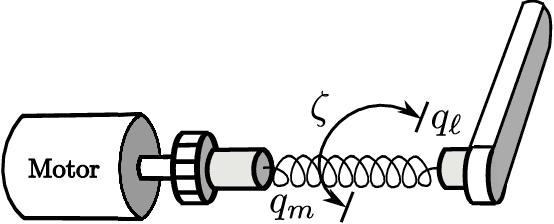
In this work we present a constructive method to design a family of virtual contraction based controllers that solve the standard trajectory tracking problem of flexible-joint robots (FJRs) in the port-Hamiltonian (pH) framework. The proposed design method, called virtual contraction based control (v-CBC), combines the concepts of virtual control systems and contraction analysis. It is shown that under potential energy matching conditions, the closed-loop virtual system is contractive and exponential convergence to a predefined trajectory is guaranteed. Moreover, the closed-loop virtual system exhibits properties such as structure preservation, differential passivity and the existence of (incrementally) passive maps.
* 10 pages, 4 figures, journal paper
Via