 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Calibration, and Control of Compliant Force-sensing Gripping Pads for Humanoid Robots
May 31, 2024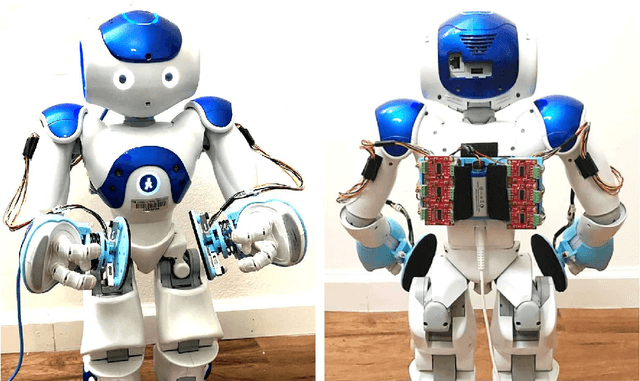

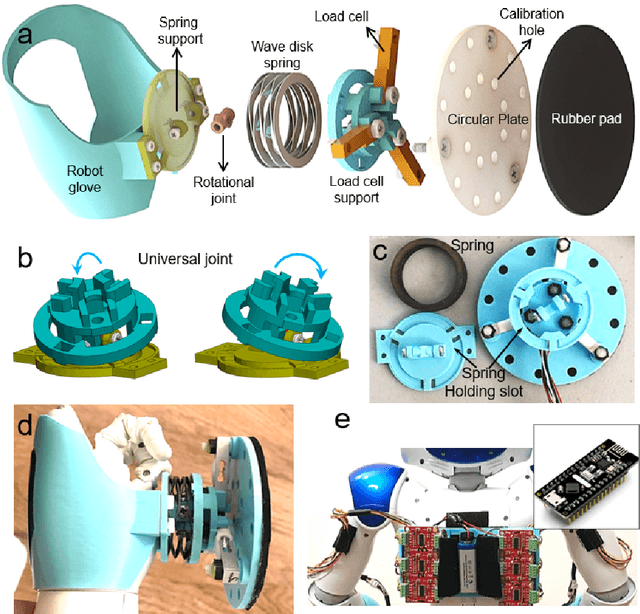

This paper introduces a pair of low-cost, light-weight and compliant force-sensing gripping pads used for manipulating box-like objects with smaller-sized humanoid robots. These pads measure normal gripping forces and center of pressure (CoP). A calibration method is developed to improve the CoP measurement accuracy. A hybrid force-alignment-position control framework is proposed to regulate the gripping forces and to ensure the surface alignment between the grippers and the object. Limit surface theory is incorporated as a contact friction modeling approach to determine the magnitude of gripping forces for slippage avoidance. The integrated hardware and software system is demonstrated with a NAO humanoid robot. Experiments show the effectiveness of the overall approach.
* 21 pages, 16 figures, Published in ASME Journal of Mechanisms and Robotics
Model-Free and Learning-Free Proprioceptive Humanoid Movement Control
Feb 28, 2023



This paper presents a novel model-free method for humanoid-robot quasi-static movement control. Traditional model-based methods often require precise robot model parameters. Additionally, existing learning-based frameworks often train the policy in simulation environments, thereby indirectly relying on a model. In contrast, we propose a proprioceptive framework based only on sensory outputs. It does not require prior knowledge of a robot's kinematic model or inertial parameters. Our method consists of three steps: 1. Planning different pairs of center of pressure (CoP) and foot position objectives within a single cycle. 2. Searching around the current configuration by slightly moving the robot's leg joints back and forth while recording the sensor measurements of its CoP and foot positions. 3. Updating the robot motion with an optimization algorithm until all objectives are achieved. We demonstrate our approach on a NAO humanoid robot platform. Experiment results show that it can successfully generate stable robot motions.
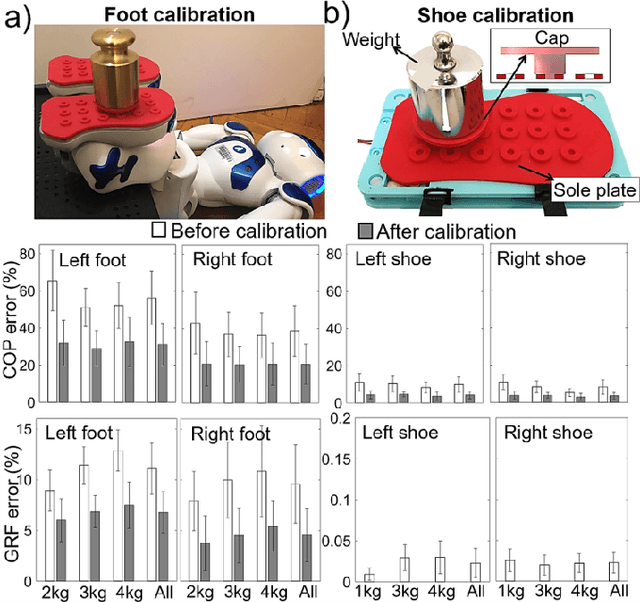
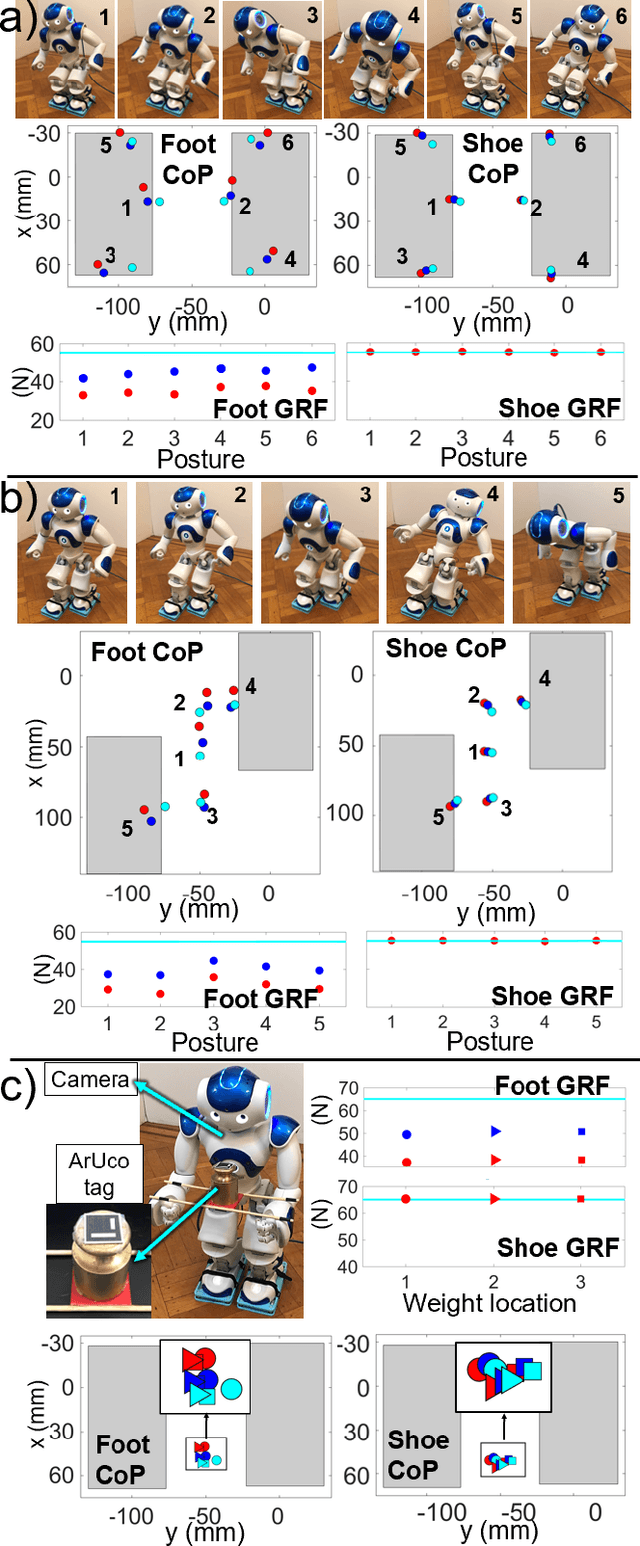
Watch Me Calibrate My Force-Sensing Shoes!
Feb 26, 2022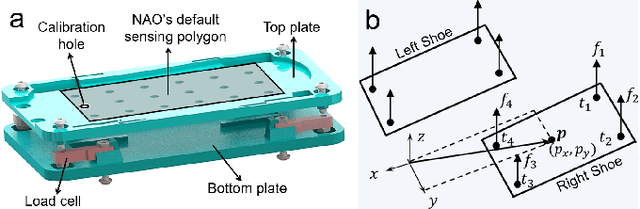
This letter presents a novel method for smaller-sized humanoid robots to self-calibrate their foot force sensors. This method consists of two steps: 1. The robot is commanded to move along several planned whole-body trajectories. 2. A nonlinear least-squares technique is implemented to determine sensor parameters by minimizing the error between the measured and modeled center of pressure (CoP) and ground reaction force (GRF) in the robot's movement. This is the first proposed autonomous calibration method for foot force sensors in humanoid robots. Additionally, a manual calibration method is developed to improve the CoP measurement accuracy, which establishes the ground truth for evaluating the self-calibration approach. The manual calibration and the self-calibration are implemented on our previously presented force-sensing shoes. The results show that the self-calibration method, without any manual intervention, can accurately estimate CoP and GRF.
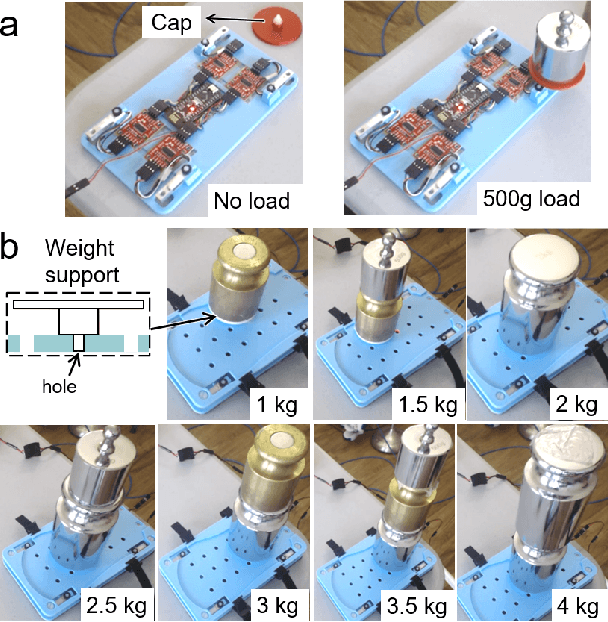
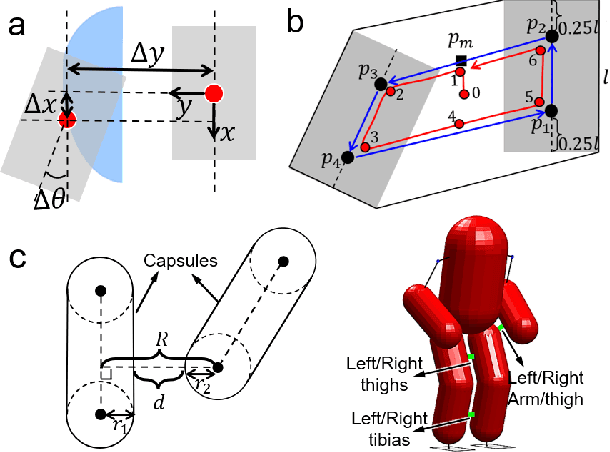
How Heavy Is It? Humanoid Robot Estimating Physical Properties of Unknown Objects Without Force/Torque Sensors
Apr 20, 2021
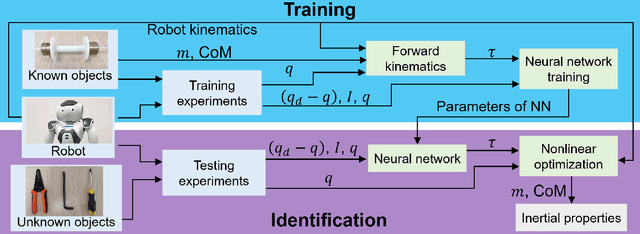
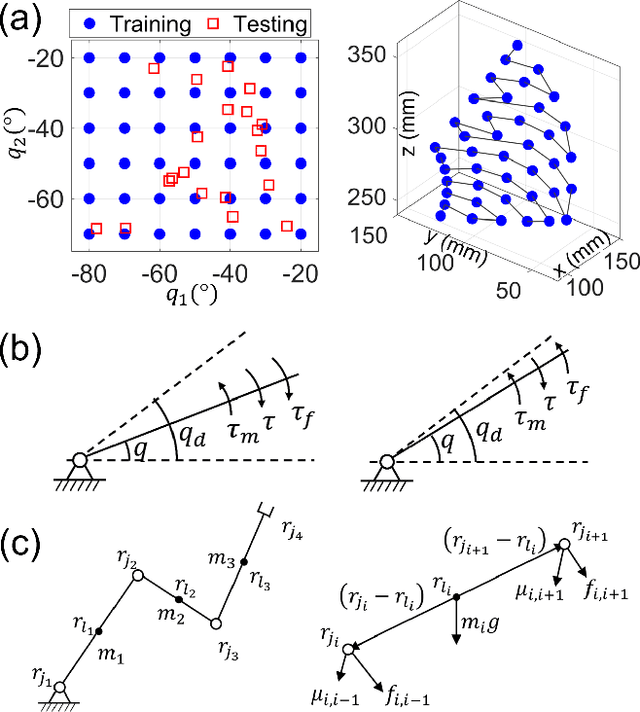
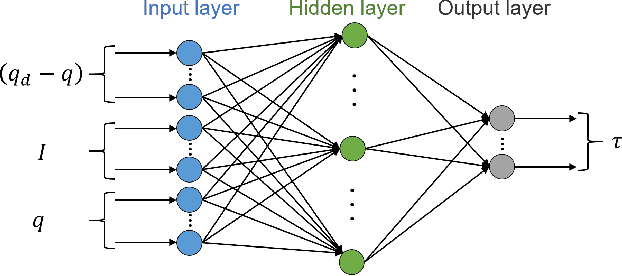
Many robots utilize commercial force/torque sensors to identify physical properties of a priori unknown objects. However, such sensors can be difficult to apply to smaller-sized robots due to their weight, size, and high-cost. In this paper, we propose a framework for smaller-sized humanoid robots to estimate the inertial properties of unknown objects without using force/torque sensors. In our framework, a neural network is designed and trained to predict joint torque outputs. The neural network's inputs are robot's joint angle, steady-state joint error, and motor current. All of these can be easily obtained from many existing smaller-sized robots. As the joint rotation direction is taken into account, the neural network can be trained with a smaller sample size, but still maintains accurate torque estimation capability. Eventually, the inertial properties of the objects are identified using a nonlinear optimization method. Our proposed framework has been demonstrated on a NAO humanoid robot.
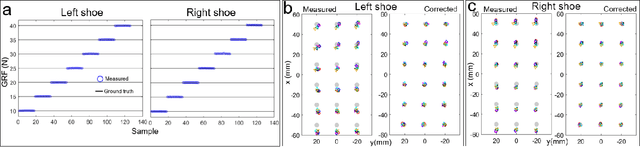
Look at my new blue force-sensing shoes!
Apr 14, 2021
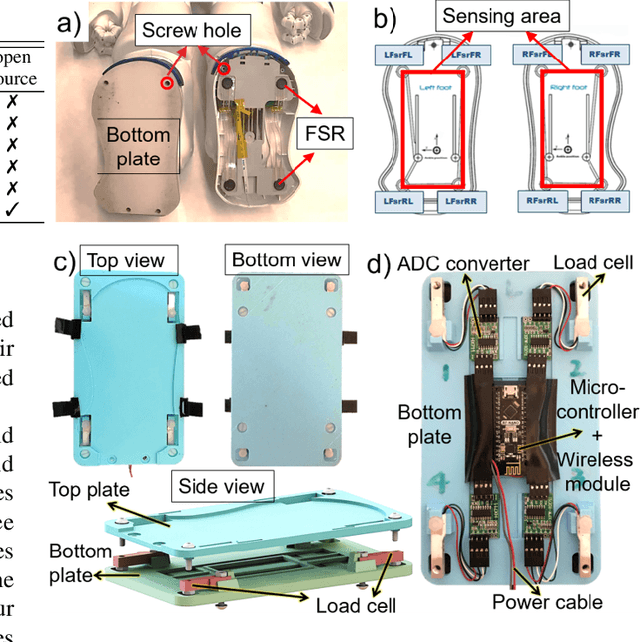
To function autonomously in the physical world, humanoid robots need high-fidelity sensing systems, especially for forces that cannot be easily modeled. Modeling forces in robot feet is particularly challenging due to static indeterminacy, thereby requiring direct sensing. Unfortunately, resolving forces in the feet of some smaller-sized humanoids is limited both by the quality of sensors and the current algorithms used to interpret the data. This paper presents light-weight, low-cost and open-source force-sensing shoes to improve force measurement for popular smaller-sized humanoid robots, and a method for calibrating the shoes. The shoes measure center of pressure (CoP) and normal ground reaction force (GRF). The calibration method enables each individual shoe to reach high measurement precision by applying known forces at different locations of the shoe and using a regularized least squares optimization to interpret sensor outputs. A NAO robot is used as our experimental platform. Experiments are conducted to compare the measurement performance between the shoes and the robot's factory-installed force-sensing resistors (FSRs), and to evaluate the calibration method over these two sensing modules. Experimental results show that the shoes significantly improve CoP and GRF measurement precision compared to the robot's built-in FSRs. Moreover, the developed calibration method improves the measurement performance for both our shoes and the built-in FSRs.
Shape-induced obstacle attraction and repulsion during dynamic locomotion
Mar 15, 2021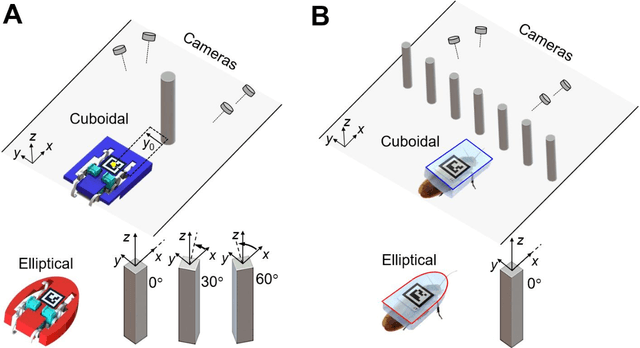
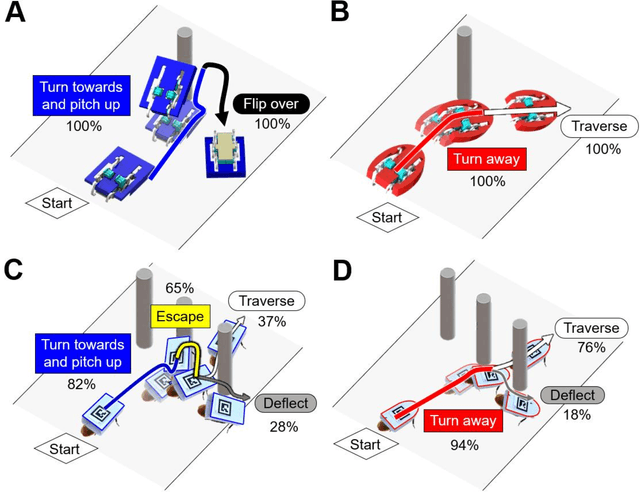
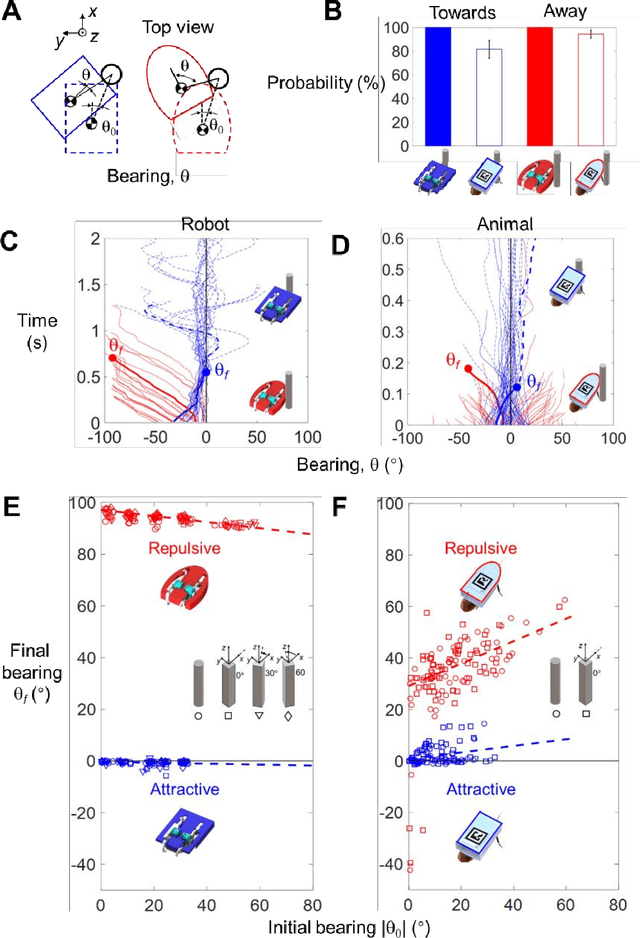
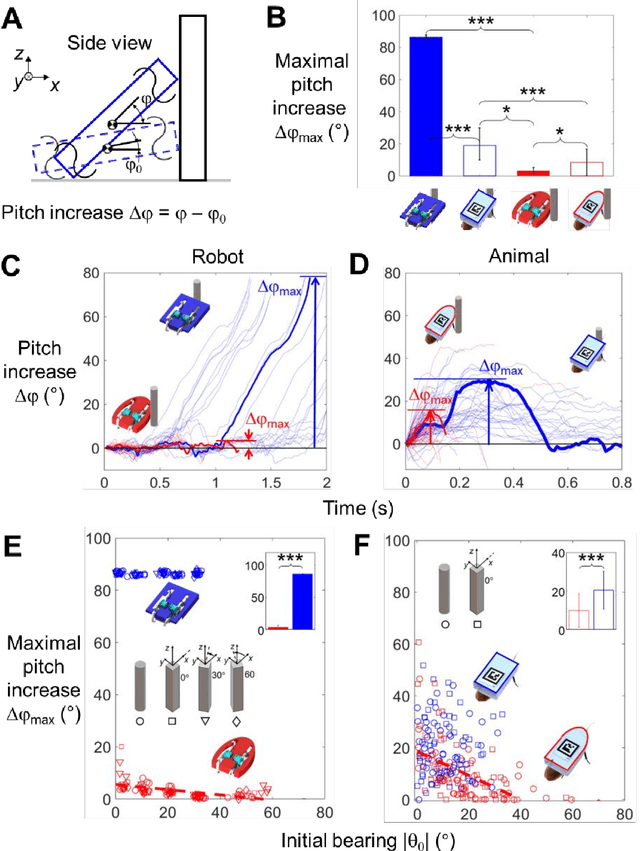
Robots still struggle to dynamically traverse complex 3-D terrain with many large obstacles, an ability required for many critical applications. Body-obstacle interaction is often inevitable and induces perturbation and uncertainty in motion that challenges closed-form dynamic modeling. Here, inspired by recent discovery of a terradynamic streamlined shape, we studied how two body shapes interacting with obstacles affect turning and pitching motions of an open-loop multi-legged robot and cockroaches during dynamic locomotion. With a common cuboidal body, the robot was attracted towards obstacles, resulting in pitching up and flipping-over. By contrast, with an elliptical body, the robot was repelled by obstacles and readily traversed. The animal displayed qualitatively similar turning and pitching motions induced by these two body shapes. However, unlike the cuboidal robot, the cuboidal animal was capable of escaping obstacle attraction and subsequent high pitching and flipping over, which inspired us to develop an empirical pitch-and-turn strategy for cuboidal robots. Considering the similarity of our self-propelled body-obstacle interaction with part-feeder interaction in robotic part manipulation, we developed a quasi-static potential energy landscape model to explain the dependence of dynamic locomotion on body shape. Our experimental and modeling results also demonstrated that obstacle attraction or repulsion is an inherent property of locomotor body shape and insensitive to obstacle geometry and size. Our study expanded the concept and usefulness of terradynamic shapes for passive control of robot locomotion to traverse large obstacles using physical interaction. Our study is also a step in establishing an energy landscape approach to locomotor transitions.
Can I lift it? Humanoid robot reasoning about the feasibility of lifting a heavy box with unknown physical properties
Aug 09, 2020A robot cannot lift up an object if it is not feasible to do so. However, in most research on robot lifting, "feasibility" is usually presumed to exist a priori. This paper proposes a three-step method for a humanoid robot to reason about the feasibility of lifting a heavy box with physical properties that are unknown to the robot. Since feasibility of lifting is directly related to the physical properties of the box, we first discretize a range for the unknown values of parameters describing these properties and tabulate all valid optimal quasi-static lifting trajectories generated by simulations over all combinations of indices. Second, a physical-interaction-based algorithm is introduced to identify the robust gripping position and physical parameters corresponding to the box. During this process, the stability and safety of the robot are ensured. On the basis of the above two steps, a third step of mapping operation is carried out to best match the estimated parameters to the indices in the table. The matched indices are then queried to determine whether a valid trajectory exists. If so, the lifting motion is feasible; otherwise, the robot decides that the task is beyond its capability. Our method efficiently evaluates the feasibility of a lifting task through simple interactions between the robot and the box, while simultaneously obtaining the desired safe and stable trajectory. We successfully demonstrated the proposed method using a NAO humanoid robot.
The Curious Robot: Learning Visual Representations via Physical Interactions
Jul 26, 2016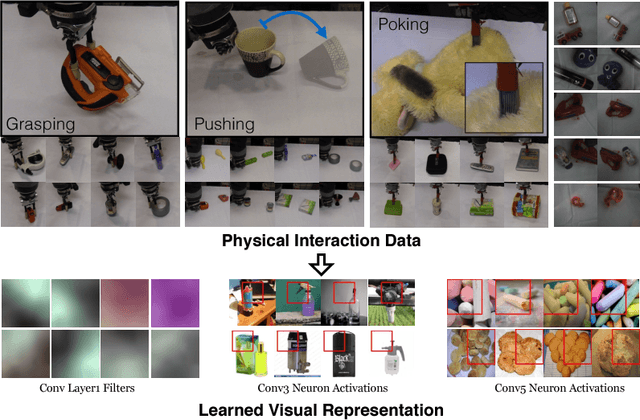

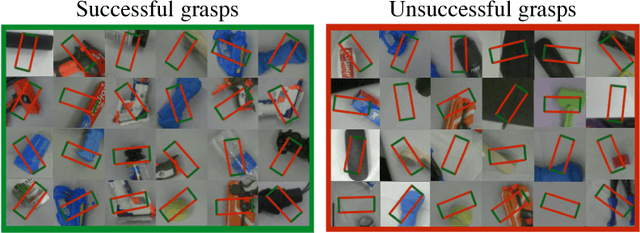

What is the right supervisory signal to train visual representations? Current approaches in computer vision use category labels from datasets such as ImageNet to train ConvNets. However, in case of biological agents, visual representation learning does not require millions of semantic labels. We argue that biological agents use physical interactions with the world to learn visual representations unlike current vision systems which just use passive observations (images and videos downloaded from web). For example, babies push objects, poke them, put them in their mouth and throw them to learn representations. Towards this goal, we build one of the first systems on a Baxter platform that pushes, pokes, grasps and observes objects in a tabletop environment. It uses four different types of physical interactions to collect more than 130K datapoints, with each datapoint providing supervision to a shared ConvNet architecture allowing us to learn visual representations. We show the quality of learned representations by observing neuron activations and performing nearest neighbor retrieval on this learned representation. Quantitatively, we evaluate our learned ConvNet on image classification tasks and show improvements compared to learning without external data. Finally, on the task of instance retrieval, our network outperforms the ImageNet network on recall@1 by 3%