 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWatch Me Calibrate My Force-Sensing Shoes!
Paper and Code
Feb 26, 2022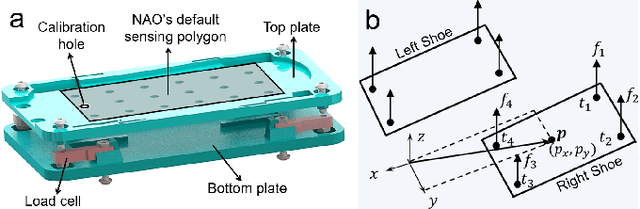
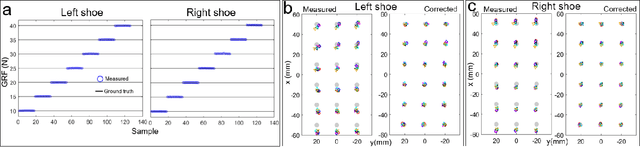
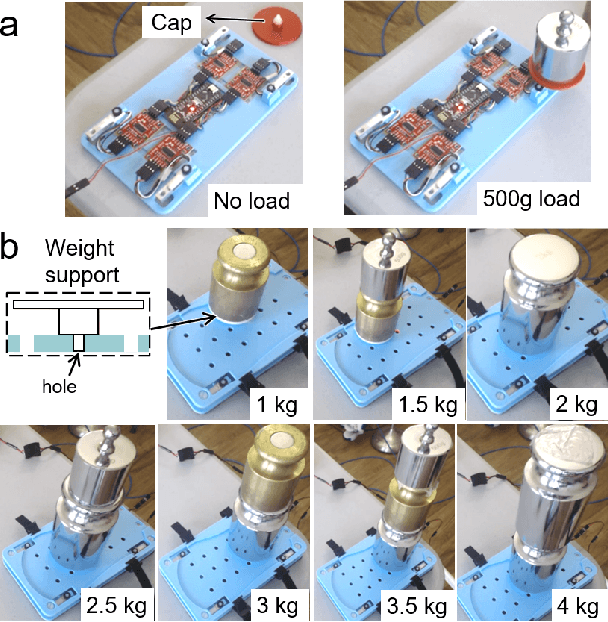
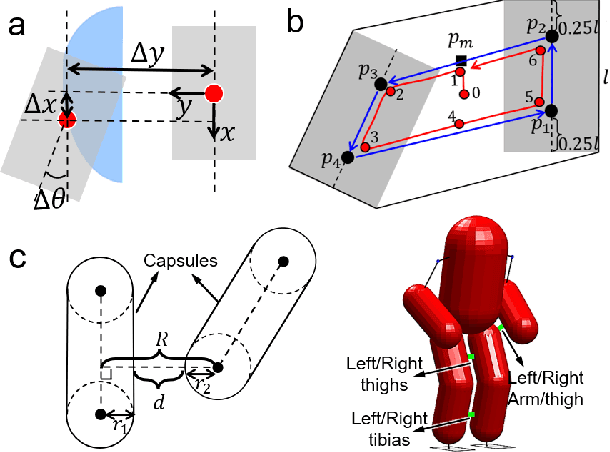
This letter presents a novel method for smaller-sized humanoid robots to self-calibrate their foot force sensors. This method consists of two steps: 1. The robot is commanded to move along several planned whole-body trajectories. 2. A nonlinear least-squares technique is implemented to determine sensor parameters by minimizing the error between the measured and modeled center of pressure (CoP) and ground reaction force (GRF) in the robot's movement. This is the first proposed autonomous calibration method for foot force sensors in humanoid robots. Additionally, a manual calibration method is developed to improve the CoP measurement accuracy, which establishes the ground truth for evaluating the self-calibration approach. The manual calibration and the self-calibration are implemented on our previously presented force-sensing shoes. The results show that the self-calibration method, without any manual intervention, can accurately estimate CoP and GRF.