 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Calibration, and Control of Compliant Force-sensing Gripping Pads for Humanoid Robots
May 31, 2024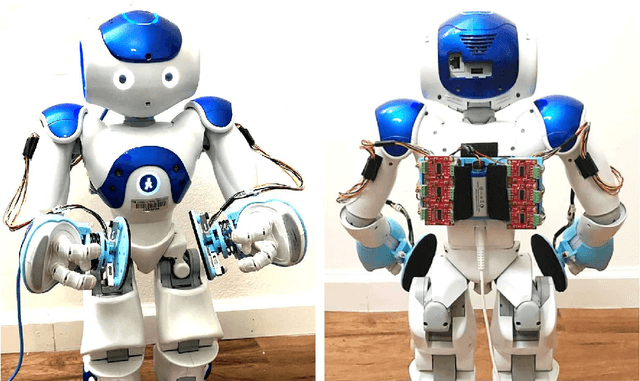

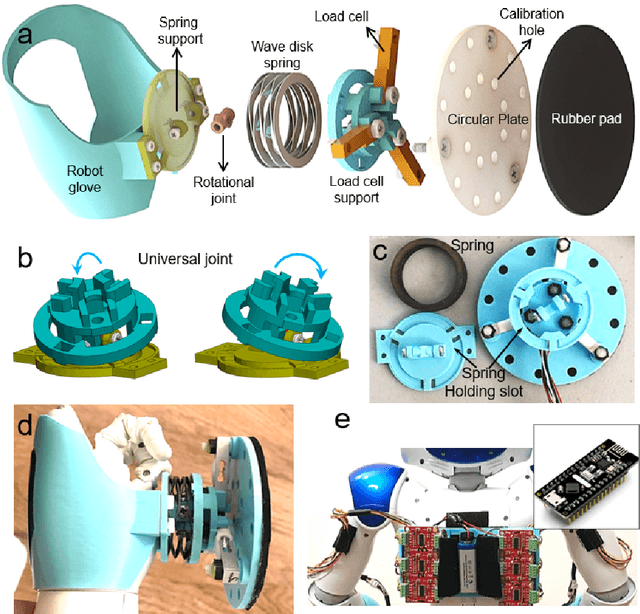

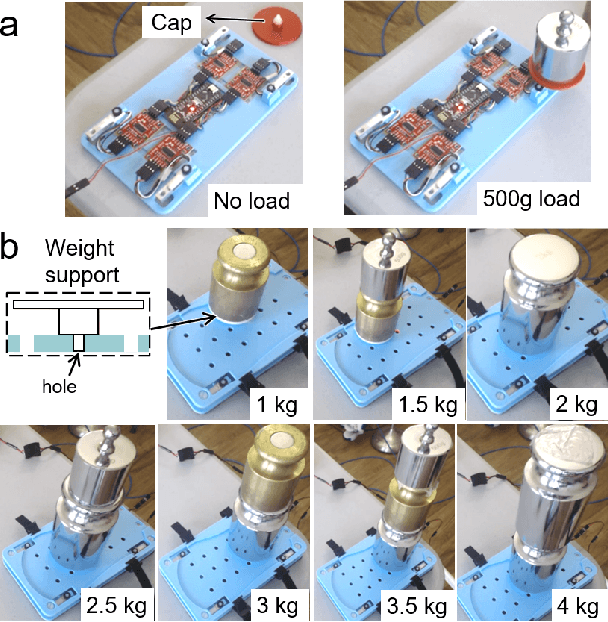
This paper introduces a pair of low-cost, light-weight and compliant force-sensing gripping pads used for manipulating box-like objects with smaller-sized humanoid robots. These pads measure normal gripping forces and center of pressure (CoP). A calibration method is developed to improve the CoP measurement accuracy. A hybrid force-alignment-position control framework is proposed to regulate the gripping forces and to ensure the surface alignment between the grippers and the object. Limit surface theory is incorporated as a contact friction modeling approach to determine the magnitude of gripping forces for slippage avoidance. The integrated hardware and software system is demonstrated with a NAO humanoid robot. Experiments show the effectiveness of the overall approach.
* 21 pages, 16 figures, Published in ASME Journal of Mechanisms and Robotics
Model-Free and Learning-Free Proprioceptive Humanoid Movement Control
Feb 28, 2023



This paper presents a novel model-free method for humanoid-robot quasi-static movement control. Traditional model-based methods often require precise robot model parameters. Additionally, existing learning-based frameworks often train the policy in simulation environments, thereby indirectly relying on a model. In contrast, we propose a proprioceptive framework based only on sensory outputs. It does not require prior knowledge of a robot's kinematic model or inertial parameters. Our method consists of three steps: 1. Planning different pairs of center of pressure (CoP) and foot position objectives within a single cycle. 2. Searching around the current configuration by slightly moving the robot's leg joints back and forth while recording the sensor measurements of its CoP and foot positions. 3. Updating the robot motion with an optimization algorithm until all objectives are achieved. We demonstrate our approach on a NAO humanoid robot platform. Experiment results show that it can successfully generate stable robot motions.
Watch Me Calibrate My Force-Sensing Shoes!
Feb 26, 2022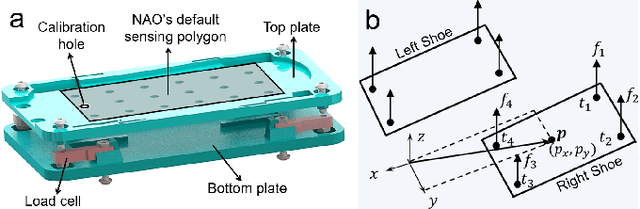
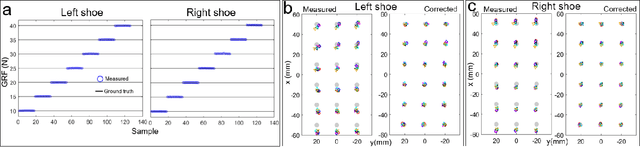
This letter presents a novel method for smaller-sized humanoid robots to self-calibrate their foot force sensors. This method consists of two steps: 1. The robot is commanded to move along several planned whole-body trajectories. 2. A nonlinear least-squares technique is implemented to determine sensor parameters by minimizing the error between the measured and modeled center of pressure (CoP) and ground reaction force (GRF) in the robot's movement. This is the first proposed autonomous calibration method for foot force sensors in humanoid robots. Additionally, a manual calibration method is developed to improve the CoP measurement accuracy, which establishes the ground truth for evaluating the self-calibration approach. The manual calibration and the self-calibration are implemented on our previously presented force-sensing shoes. The results show that the self-calibration method, without any manual intervention, can accurately estimate CoP and GRF.