 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Calibration, and Control of Compliant Force-sensing Gripping Pads for Humanoid Robots
Paper and Code
May 31, 2024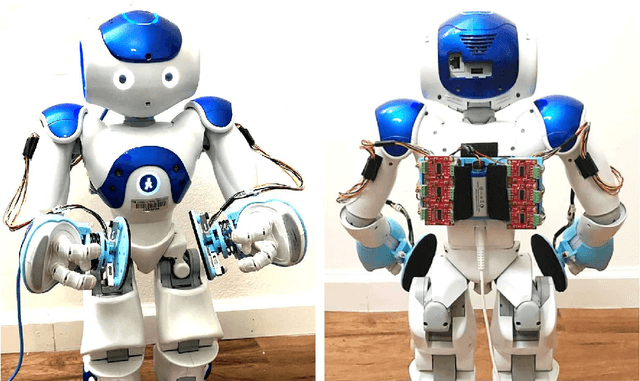

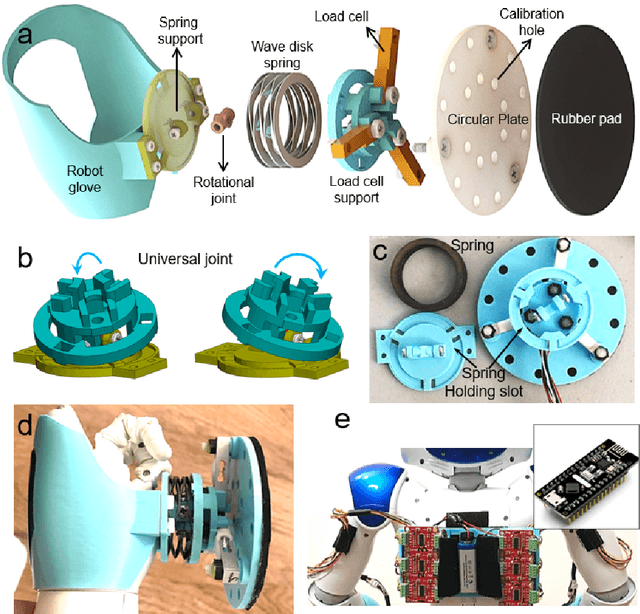

This paper introduces a pair of low-cost, light-weight and compliant force-sensing gripping pads used for manipulating box-like objects with smaller-sized humanoid robots. These pads measure normal gripping forces and center of pressure (CoP). A calibration method is developed to improve the CoP measurement accuracy. A hybrid force-alignment-position control framework is proposed to regulate the gripping forces and to ensure the surface alignment between the grippers and the object. Limit surface theory is incorporated as a contact friction modeling approach to determine the magnitude of gripping forces for slippage avoidance. The integrated hardware and software system is demonstrated with a NAO humanoid robot. Experiments show the effectiveness of the overall approach.