 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow Heavy Is It? Humanoid Robot Estimating Physical Properties of Unknown Objects Without Force/Torque Sensors
Paper and Code
Apr 20, 2021
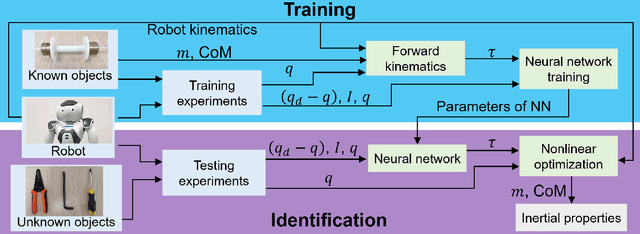
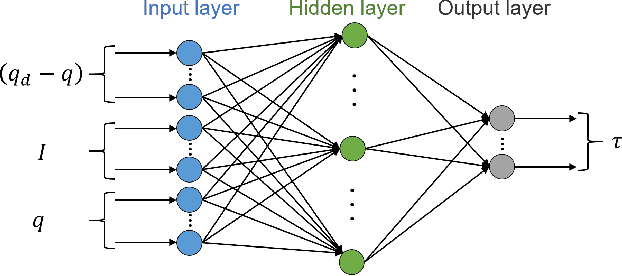
Many robots utilize commercial force/torque sensors to identify physical properties of a priori unknown objects. However, such sensors can be difficult to apply to smaller-sized robots due to their weight, size, and high-cost. In this paper, we propose a framework for smaller-sized humanoid robots to estimate the inertial properties of unknown objects without using force/torque sensors. In our framework, a neural network is designed and trained to predict joint torque outputs. The neural network's inputs are robot's joint angle, steady-state joint error, and motor current. All of these can be easily obtained from many existing smaller-sized robots. As the joint rotation direction is taken into account, the neural network can be trained with a smaller sample size, but still maintains accurate torque estimation capability. Eventually, the inertial properties of the objects are identified using a nonlinear optimization method. Our proposed framework has been demonstrated on a NAO humanoid robot.