 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgedroidlet: modular, heterogenous, multi-modal agents
Jan 25, 2021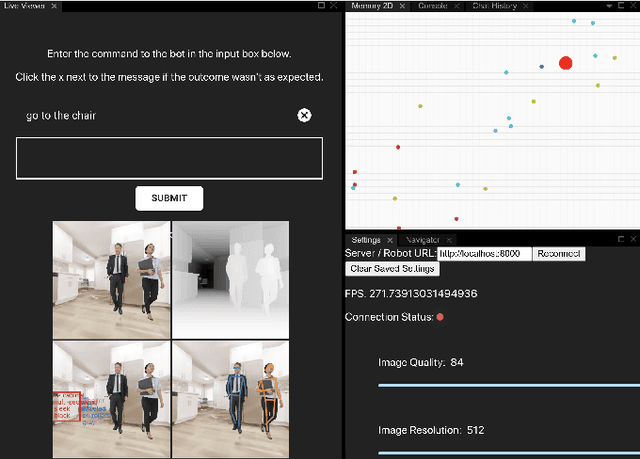
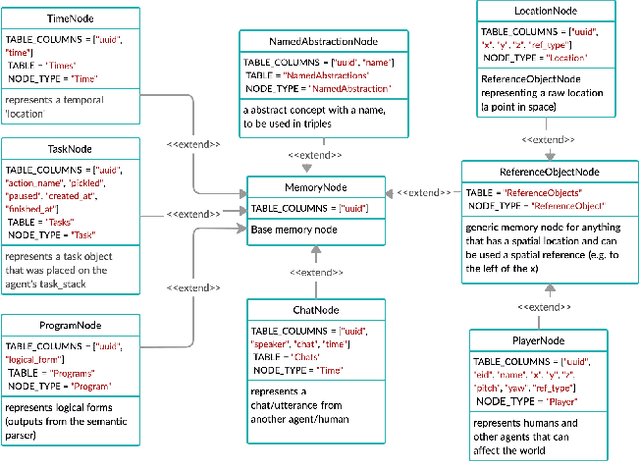
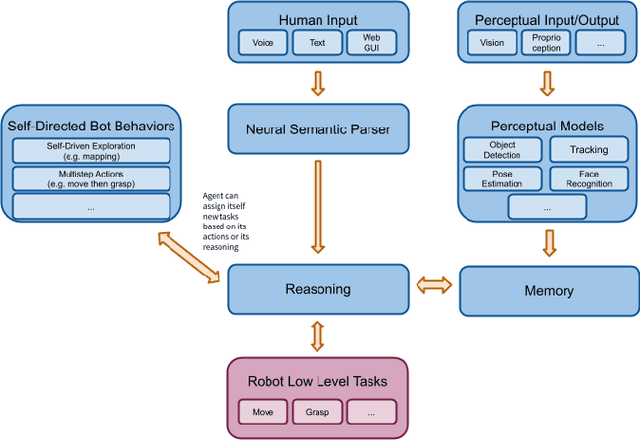
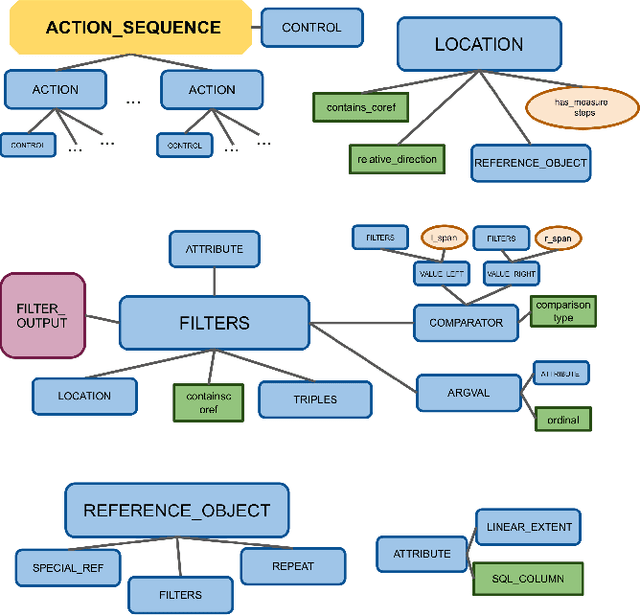
In recent years, there have been significant advances in building end-to-end Machine Learning (ML) systems that learn at scale. But most of these systems are: (a) isolated (perception, speech, or language only); (b) trained on static datasets. On the other hand, in the field of robotics, large-scale learning has always been difficult. Supervision is hard to gather and real world physical interactions are expensive. In this work we introduce and open-source droidlet, a modular, heterogeneous agent architecture and platform. It allows us to exploit both large-scale static datasets in perception and language and sophisticated heuristics often used in robotics; and provides tools for interactive annotation. Furthermore, it brings together perception, language and action onto one platform, providing a path towards agents that learn from the richness of real world interactions.
Visual Imitation Made Easy
Aug 11, 2020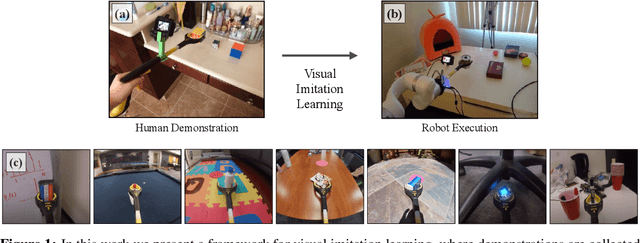

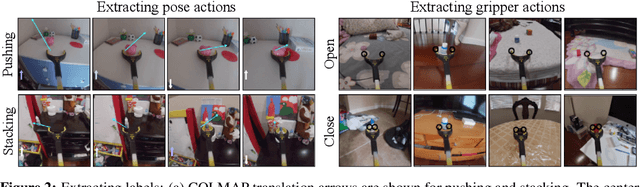
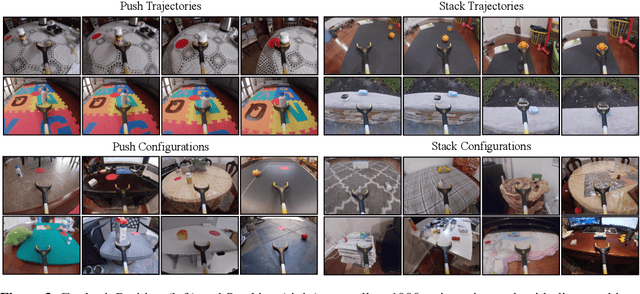
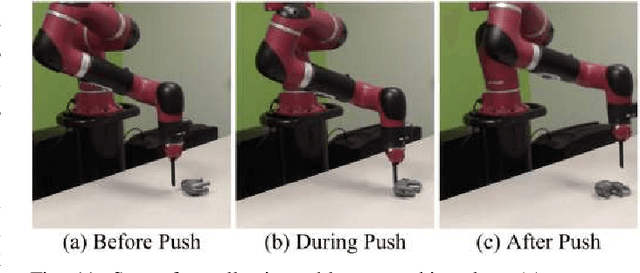
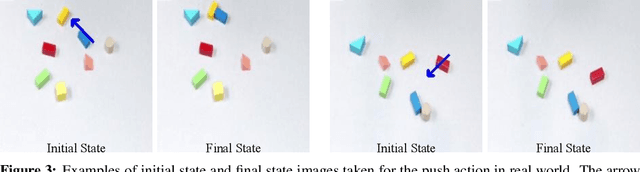
Visual imitation learning provides a framework for learning complex manipulation behaviors by leveraging human demonstrations. However, current interfaces for imitation such as kinesthetic teaching or teleoperation prohibitively restrict our ability to efficiently collect large-scale data in the wild. Obtaining such diverse demonstration data is paramount for the generalization of learned skills to novel scenarios. In this work, we present an alternate interface for imitation that simplifies the data collection process while allowing for easy transfer to robots. We use commercially available reacher-grabber assistive tools both as a data collection device and as the robot's end-effector. To extract action information from these visual demonstrations, we use off-the-shelf Structure from Motion (SfM) techniques in addition to training a finger detection network. We experimentally evaluate on two challenging tasks: non-prehensile pushing and prehensile stacking, with 1000 diverse demonstrations for each task. For both tasks, we use standard behavior cloning to learn executable policies from the previously collected offline demonstrations. To improve learning performance, we employ a variety of data augmentations and provide an extensive analysis of its effects. Finally, we demonstrate the utility of our interface by evaluating on real robotic scenarios with previously unseen objects and achieve a 87% success rate on pushing and a 62% success rate on stacking. Robot videos are available at https://dhiraj100892.github.io/Visual-Imitation-Made-Easy.
Swoosh! Rattle! Thump! -- Actions that Sound
Jul 03, 2020
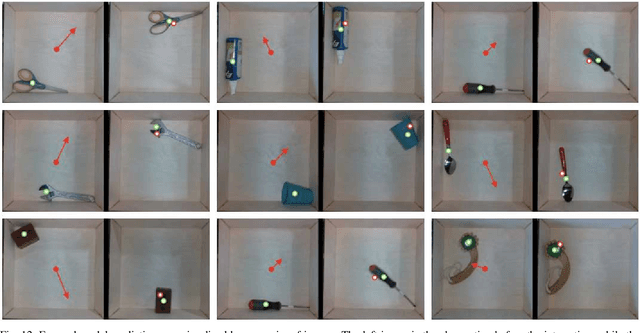
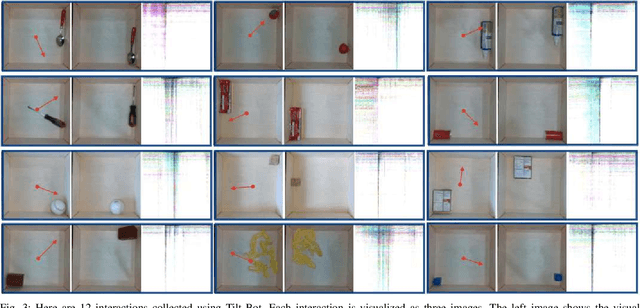
Truly intelligent agents need to capture the interplay of all their senses to build a rich physical understanding of their world. In robotics, we have seen tremendous progress in using visual and tactile perception; however, we have often ignored a key sense: sound. This is primarily due to the lack of data that captures the interplay of action and sound. In this work, we perform the first large-scale study of the interactions between sound and robotic action. To do this, we create the largest available sound-action-vision dataset with 15,000 interactions on 60 objects using our robotic platform Tilt-Bot. By tilting objects and allowing them to crash into the walls of a robotic tray, we collect rich four-channel audio information. Using this data, we explore the synergies between sound and action and present three key insights. First, sound is indicative of fine-grained object class information, e.g., sound can differentiate a metal screwdriver from a metal wrench. Second, sound also contains information about the causal effects of an action, i.e. given the sound produced, we can predict what action was applied to the object. Finally, object representations derived from audio embeddings are indicative of implicit physical properties. We demonstrate that on previously unseen objects, audio embeddings generated through interactions can predict forward models 24% better than passive visual embeddings. Project videos and data are at https://dhiraj100892.github.io/swoosh/
Object Goal Navigation using Goal-Oriented Semantic Exploration
Jul 02, 2020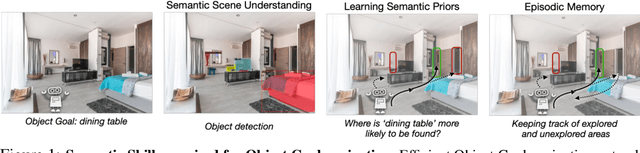
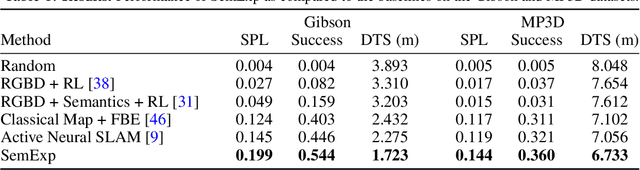


This work studies the problem of object goal navigation which involves navigating to an instance of the given object category in unseen environments. End-to-end learning-based navigation methods struggle at this task as they are ineffective at exploration and long-term planning. We propose a modular system called, `Goal-Oriented Semantic Exploration' which builds an episodic semantic map and uses it to explore the environment efficiently based on the goal object category. Empirical results in visually realistic simulation environments show that the proposed model outperforms a wide range of baselines including end-to-end learning-based methods as well as modular map-based methods and led to the winning entry of the CVPR-2020 Habitat ObjectNav Challenge. Ablation analysis indicates that the proposed model learns semantic priors of the relative arrangement of objects in a scene, and uses them to explore efficiently. Domain-agnostic module design allow us to transfer our model to a mobile robot platform and achieve similar performance for object goal navigation in the real-world.
Learning to Explore using Active Neural SLAM
Apr 10, 2020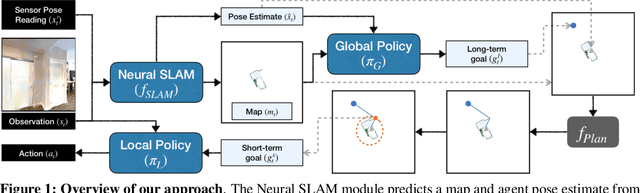

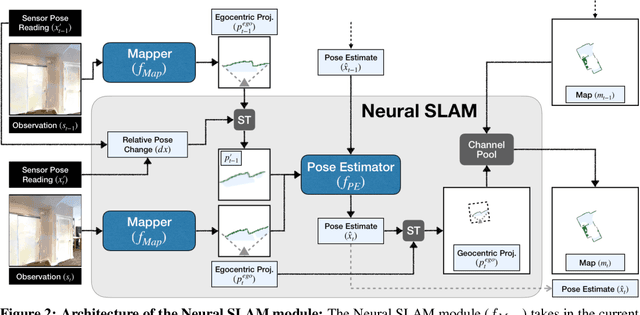

This work presents a modular and hierarchical approach to learn policies for exploring 3D environments, called `Active Neural SLAM'. Our approach leverages the strengths of both classical and learning-based methods, by using analytical path planners with learned SLAM module, and global and local policies. The use of learning provides flexibility with respect to input modalities (in the SLAM module), leverages structural regularities of the world (in global policies), and provides robustness to errors in state estimation (in local policies). Such use of learning within each module retains its benefits, while at the same time, hierarchical decomposition and modular training allow us to sidestep the high sample complexities associated with training end-to-end policies. Our experiments in visually and physically realistic simulated 3D environments demonstrate the effectiveness of our approach over past learning and geometry-based approaches. The proposed model can also be easily transferred to the PointGoal task and was the winning entry of the CVPR 2019 Habitat PointGoal Navigation Challenge.
Object-centric Forward Modeling for Model Predictive Control
Oct 08, 2019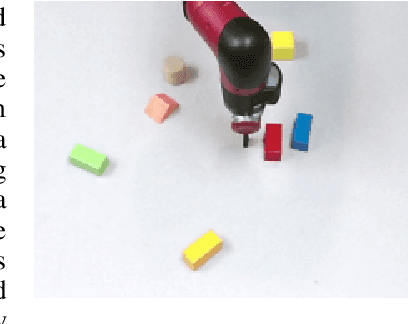
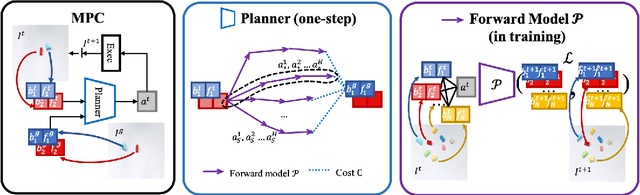
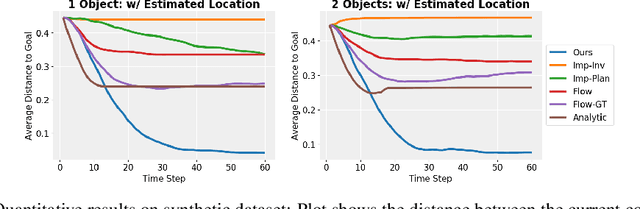
We present an approach to learn an object-centric forward model, and show that this allows us to plan for sequences of actions to achieve distant desired goals. We propose to model a scene as a collection of objects, each with an explicit spatial location and implicit visual feature, and learn to model the effects of actions using random interaction data. Our model allows capturing the robot-object and object-object interactions, and leads to more sample-efficient and accurate predictions. We show that this learned model can be leveraged to search for action sequences that lead to desired goal configurations, and that in conjunction with a learned correction module, this allows for robust closed loop execution. We present experiments both in simulation and the real world, and show that our approach improves over alternate implicit or pixel-space forward models. Please see our project page (https://judyye.github.io/ocmpc/) for result videos.
PyRobot: An Open-source Robotics Framework for Research and Benchmarking
Jun 19, 2019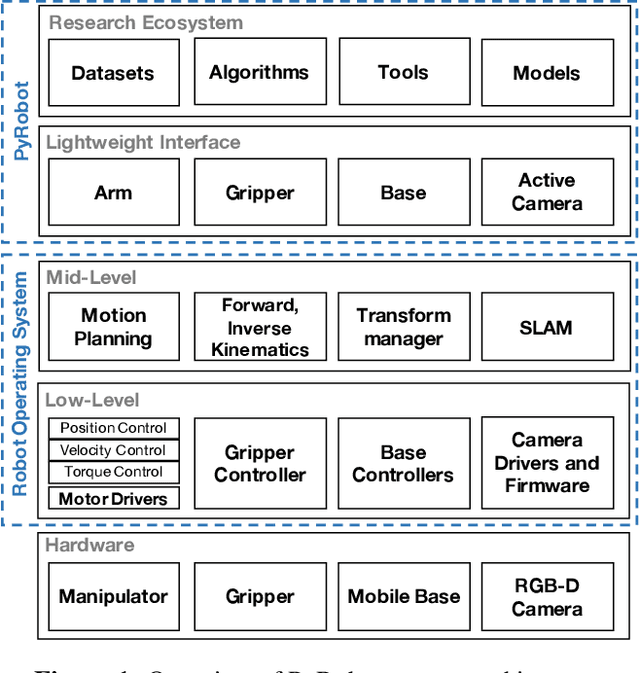
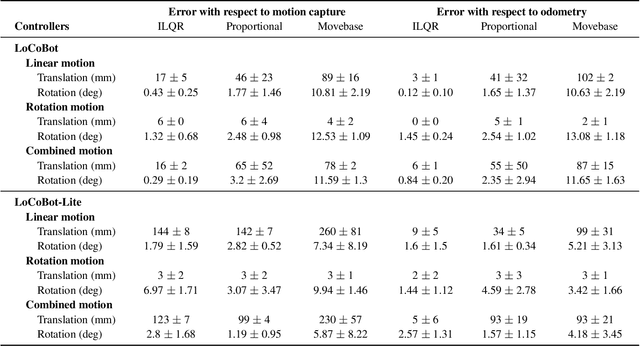
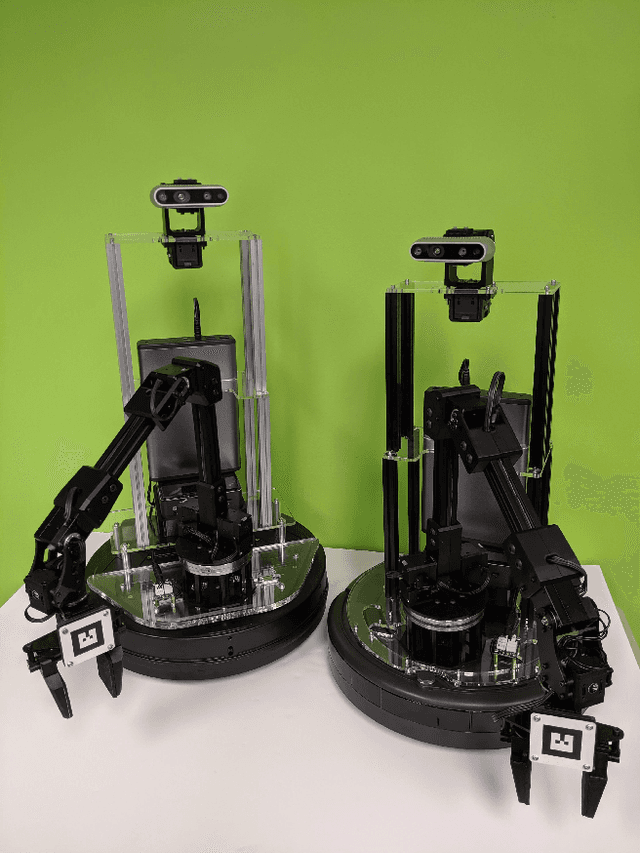
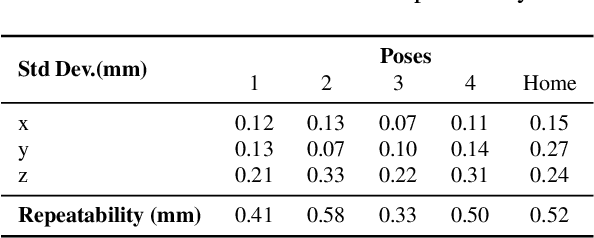
This paper introduces PyRobot, an open-source robotics framework for research and benchmarking. PyRobot is a light-weight, high-level interface on top of ROS that provides a consistent set of hardware independent mid-level APIs to control different robots. PyRobot abstracts away details about low-level controllers and inter-process communication, and allows non-robotics researchers (ML, CV researchers) to focus on building high-level AI applications. PyRobot aims to provide a research ecosystem with convenient access to robotics datasets, algorithm implementations and models that can be used to quickly create a state-of-the-art baseline. We believe PyRobot, when paired up with low-cost robot platforms such as LoCoBot, will reduce the entry barrier into robotics, and democratize robotics. PyRobot is open-source, and can be accessed via https://pyrobot.org.
Self-Supervised Exploration via Disagreement
Jun 10, 2019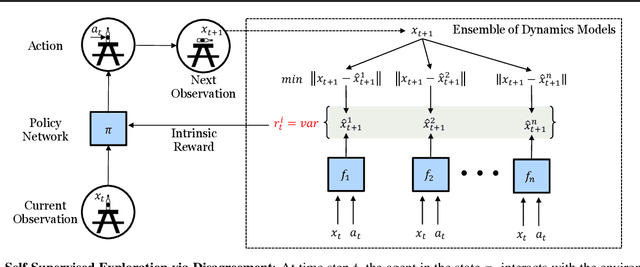
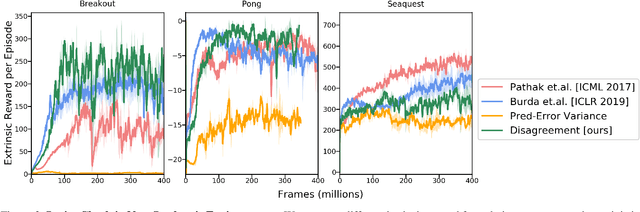
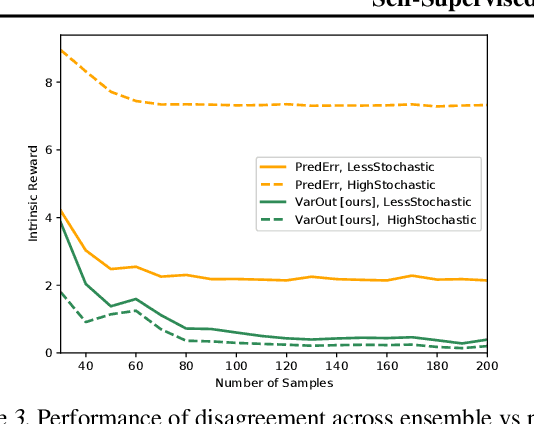
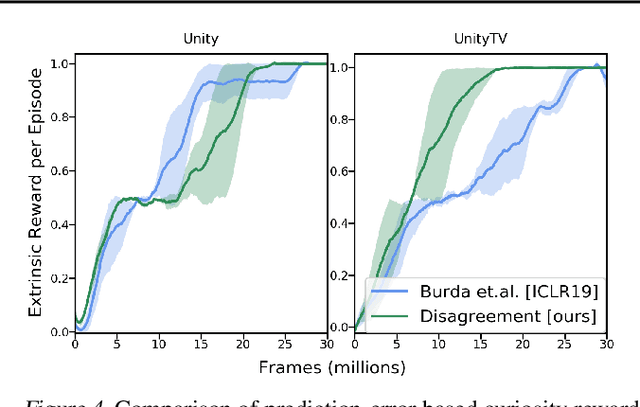
Efficient exploration is a long-standing problem in sensorimotor learning. Major advances have been demonstrated in noise-free, non-stochastic domains such as video games and simulation. However, most of these formulations either get stuck in environments with stochastic dynamics or are too inefficient to be scalable to real robotics setups. In this paper, we propose a formulation for exploration inspired by the work in active learning literature. Specifically, we train an ensemble of dynamics models and incentivize the agent to explore such that the disagreement of those ensembles is maximized. This allows the agent to learn skills by exploring in a self-supervised manner without any external reward. Notably, we further leverage the disagreement objective to optimize the agent's policy in a differentiable manner, without using reinforcement learning, which results in a sample-efficient exploration. We demonstrate the efficacy of this formulation across a variety of benchmark environments including stochastic-Atari, Mujoco and Unity. Finally, we implement our differentiable exploration on a real robot which learns to interact with objects completely from scratch. Project videos and code are at https://pathak22.github.io/exploration-by-disagreement/
Robot Learning in Homes: Improving Generalization and Reducing Dataset Bias
Jul 18, 2018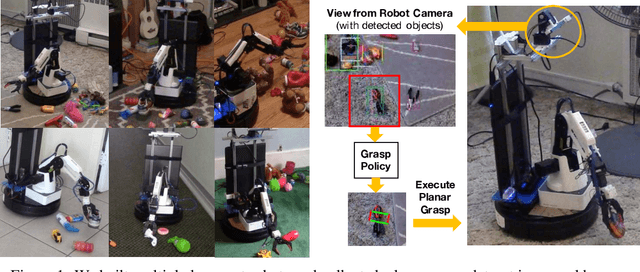
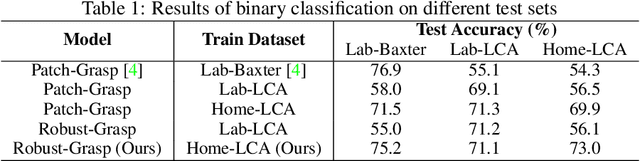
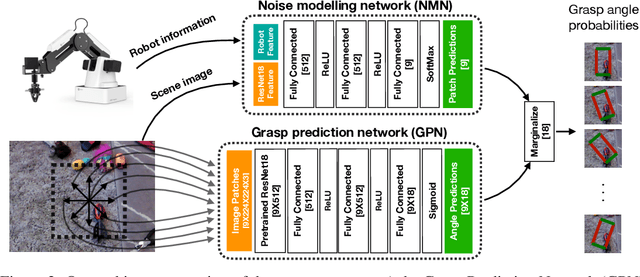
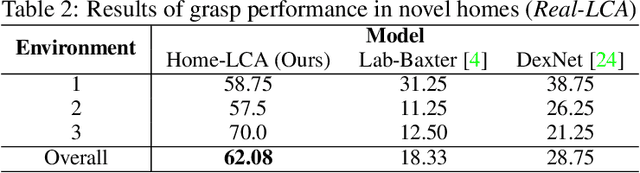
Data-driven approaches to solving robotic tasks have gained a lot of traction in recent years. However, most existing policies are trained on large-scale datasets collected in curated lab settings. If we aim to deploy these models in unstructured visual environments like people's homes, they will be unable to cope with the mismatch in data distribution. In such light, we present the first systematic effort in collecting a large dataset for robotic grasping in homes. First, to scale and parallelize data collection, we built a low cost mobile manipulator assembled for under 3K USD. Second, data collected using low cost robots suffer from noisy labels due to imperfect execution and calibration errors. To handle this, we develop a framework which factors out the noise as a latent variable. Our model is trained on 28K grasps collected in several houses under an array of different environmental conditions. We evaluate our models by physically executing grasps on a collection of novel objects in multiple unseen homes. The models trained with our home dataset showed a marked improvement of 43.7% over a baseline model trained with data collected in lab. Our architecture which explicitly models the latent noise in the dataset also performed 10% better than one that did not factor out the noise. We hope this effort inspires the robotics community to look outside the lab and embrace learning based approaches to handle inaccurate cheap robots.
Learning to Grasp Without Seeing
May 10, 2018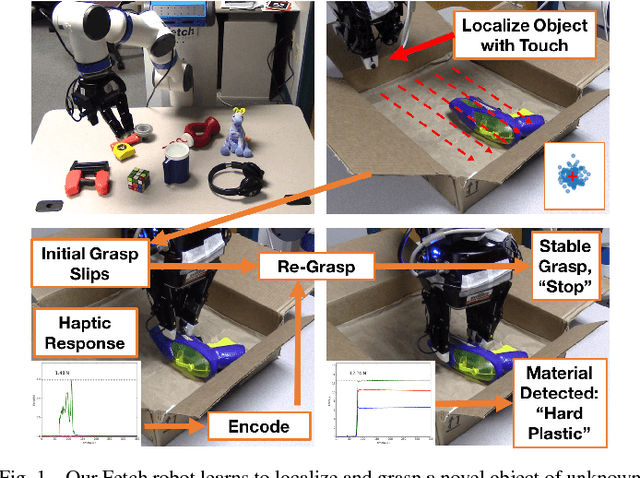
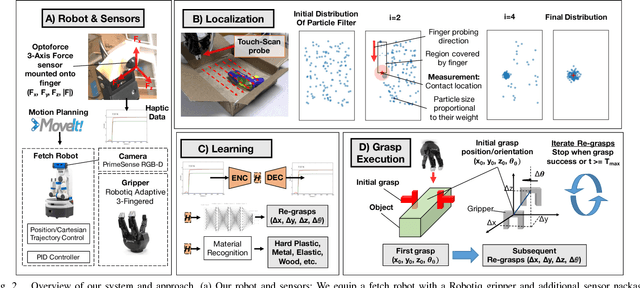
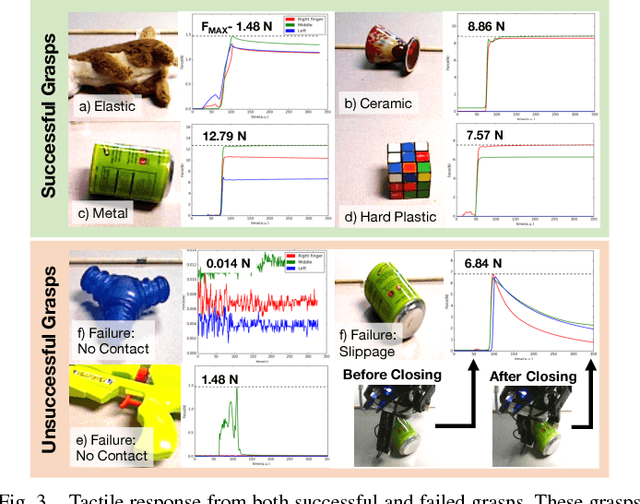
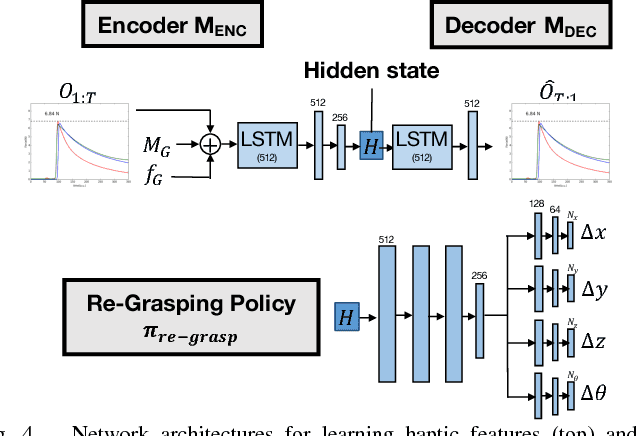
Can a robot grasp an unknown object without seeing it? In this paper, we present a tactile-sensing based approach to this challenging problem of grasping novel objects without prior knowledge of their location or physical properties. Our key idea is to combine touch based object localization with tactile based re-grasping. To train our learning models, we created a large-scale grasping dataset, including more than 30 RGB frames and over 2.8 million tactile samples from 7800 grasp interactions of 52 objects. To learn a representation of tactile signals, we propose an unsupervised auto-encoding scheme, which shows a significant improvement of 4-9% over prior methods on a variety of tactile perception tasks. Our system consists of two steps. First, our touch localization model sequentially 'touch-scans' the workspace and uses a particle filter to aggregate beliefs from multiple hits of the target. It outputs an estimate of the object's location, from which an initial grasp is established. Next, our re-grasping model learns to progressively improve grasps with tactile feedback based on the learned features. This network learns to estimate grasp stability and predict adjustment for the next grasp. Re-grasping thus is performed iteratively until our model identifies a stable grasp. Finally, we demonstrate extensive experimental results on grasping a large set of novel objects using tactile sensing alone. Furthermore, when applied on top of a vision-based policy, our re-grasping model significantly boosts the overall accuracy by 10.6%. We believe this is the first attempt at learning to grasp with only tactile sensing and without any prior object knowledge.