 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgedroidlet: modular, heterogenous, multi-modal agents
Jan 25, 2021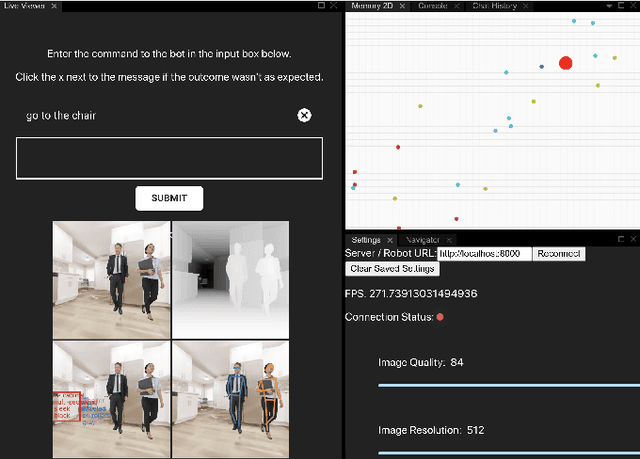
In recent years, there have been significant advances in building end-to-end Machine Learning (ML) systems that learn at scale. But most of these systems are: (a) isolated (perception, speech, or language only); (b) trained on static datasets. On the other hand, in the field of robotics, large-scale learning has always been difficult. Supervision is hard to gather and real world physical interactions are expensive. In this work we introduce and open-source droidlet, a modular, heterogeneous agent architecture and platform. It allows us to exploit both large-scale static datasets in perception and language and sophisticated heuristics often used in robotics; and provides tools for interactive annotation. Furthermore, it brings together perception, language and action onto one platform, providing a path towards agents that learn from the richness of real world interactions.