 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShape-induced obstacle attraction and repulsion during dynamic locomotion
Paper and Code
Mar 15, 2021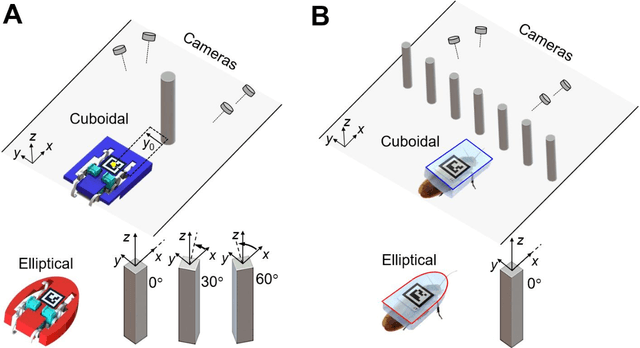
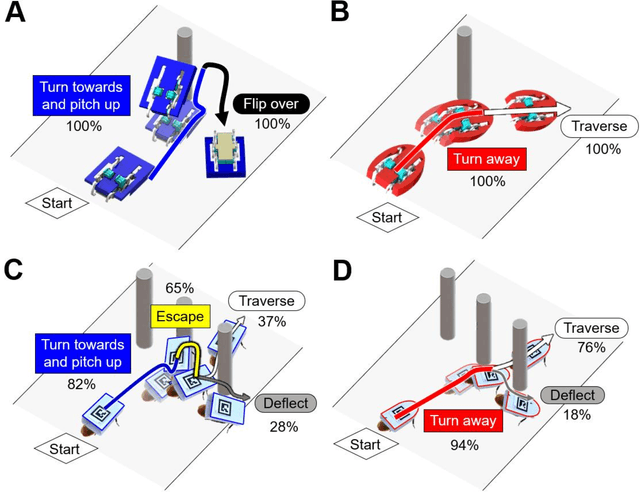
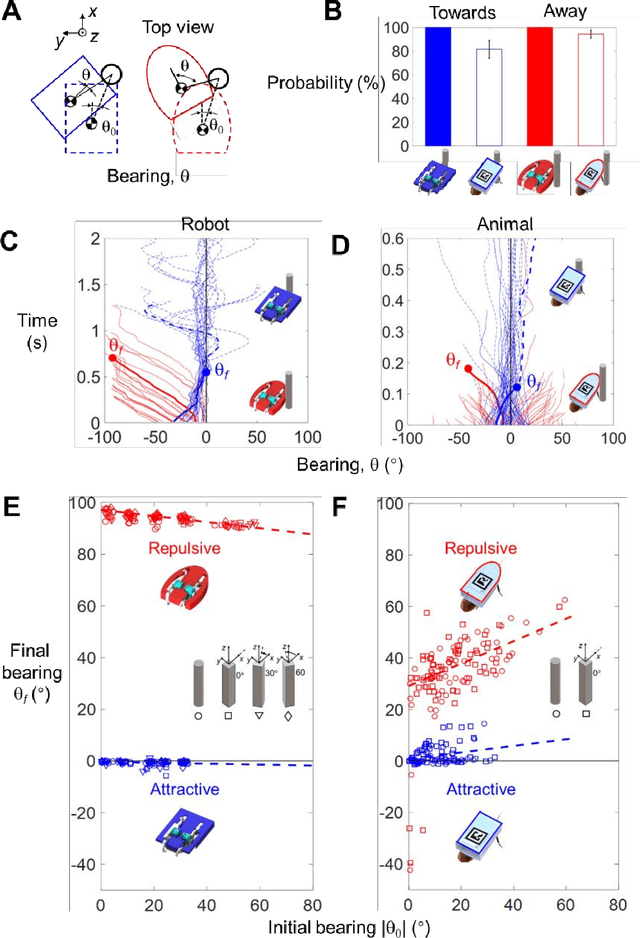
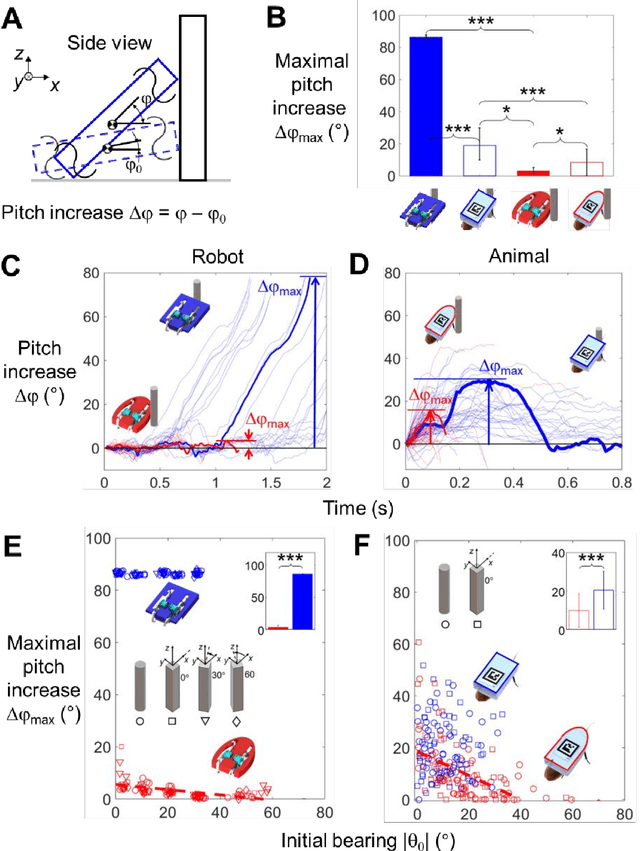
Robots still struggle to dynamically traverse complex 3-D terrain with many large obstacles, an ability required for many critical applications. Body-obstacle interaction is often inevitable and induces perturbation and uncertainty in motion that challenges closed-form dynamic modeling. Here, inspired by recent discovery of a terradynamic streamlined shape, we studied how two body shapes interacting with obstacles affect turning and pitching motions of an open-loop multi-legged robot and cockroaches during dynamic locomotion. With a common cuboidal body, the robot was attracted towards obstacles, resulting in pitching up and flipping-over. By contrast, with an elliptical body, the robot was repelled by obstacles and readily traversed. The animal displayed qualitatively similar turning and pitching motions induced by these two body shapes. However, unlike the cuboidal robot, the cuboidal animal was capable of escaping obstacle attraction and subsequent high pitching and flipping over, which inspired us to develop an empirical pitch-and-turn strategy for cuboidal robots. Considering the similarity of our self-propelled body-obstacle interaction with part-feeder interaction in robotic part manipulation, we developed a quasi-static potential energy landscape model to explain the dependence of dynamic locomotion on body shape. Our experimental and modeling results also demonstrated that obstacle attraction or repulsion is an inherent property of locomotor body shape and insensitive to obstacle geometry and size. Our study expanded the concept and usefulness of terradynamic shapes for passive control of robot locomotion to traverse large obstacles using physical interaction. Our study is also a step in establishing an energy landscape approach to locomotor transitions.