 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDualVision ArthroNav: Investigating Opportunities to Enhance Localization and Reconstruction in Image-based Arthroscopy Navigation via External Cameras
Nov 12, 2025


Arthroscopic procedures can greatly benefit from navigation systems that enhance spatial awareness, depth perception, and field of view. However, existing optical tracking solutions impose strict workspace constraints and disrupt surgical workflow. Vision-based alternatives, though less invasive, often rely solely on the monocular arthroscope camera, making them prone to drift, scale ambiguity, and sensitivity to rapid motion or occlusion. We propose DualVision ArthroNav, a multi-camera arthroscopy navigation system that integrates an external camera rigidly mounted on the arthroscope. The external camera provides stable visual odometry and absolute localization, while the monocular arthroscope video enables dense scene reconstruction. By combining these complementary views, our system resolves the scale ambiguity and long-term drift inherent in monocular SLAM and ensures robust relocalization. Experiments demonstrate that our system effectively compensates for calibration errors, achieving an average absolute trajectory error of 1.09 mm. The reconstructed scenes reach an average target registration error of 2.16 mm, with high visual fidelity (SSIM = 0.69, PSNR = 22.19). These results indicate that our system provides a practical and cost-efficient solution for arthroscopic navigation, bridging the gap between optical tracking and purely vision-based systems, and paving the way toward clinically deployable, fully vision-based arthroscopic guidance.
Privacy-Preserving Operating Room Workflow Analysis using Digital Twins
Apr 17, 2025
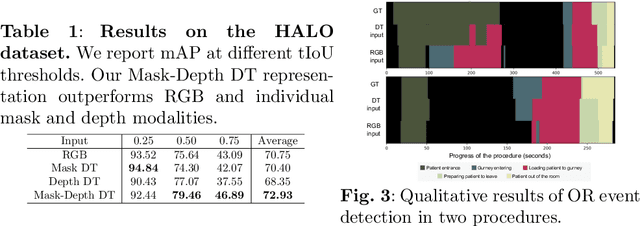
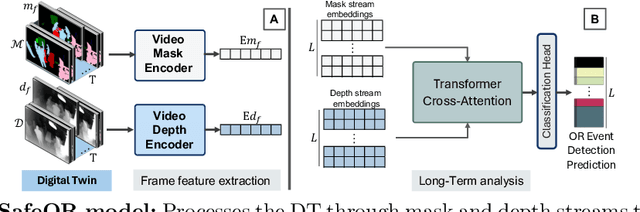

Purpose: The operating room (OR) is a complex environment where optimizing workflows is critical to reduce costs and improve patient outcomes. The use of computer vision approaches for the automatic recognition of perioperative events enables identification of bottlenecks for OR optimization. However, privacy concerns limit the use of computer vision for automated event detection from OR videos, which makes privacy-preserving approaches needed for OR workflow analysis. Methods: We propose a two-stage pipeline for privacy-preserving OR video analysis and event detection. In the first stage, we leverage vision foundation models for depth estimation and semantic segmentation to generate de-identified Digital Twins (DT) of the OR from conventional RGB videos. In the second stage, we employ the SafeOR model, a fused two-stream approach that processes segmentation masks and depth maps for OR event detection. We evaluate this method on an internal dataset of 38 simulated surgical trials with five event classes. Results: Our results indicate that this DT-based approach to the OR event detection model achieves performance on par and sometimes even better than raw RGB video-based models on detecting OR events. Conclusion: DTs enable privacy-preserving OR workflow analysis, facilitating the sharing of de-identified data across institutions and they can potentially enhance model generalizability by mitigating domain-specific appearance differences.
dARt Vinci: Egocentric Data Collection for Surgical Robot Learning at Scale
Mar 07, 2025Data scarcity has long been an issue in the robot learning community. Particularly, in safety-critical domains like surgical applications, obtaining high-quality data can be especially difficult. It poses challenges to researchers seeking to exploit recent advancements in reinforcement learning and imitation learning, which have greatly improved generalizability and enabled robots to conduct tasks autonomously. We introduce dARt Vinci, a scalable data collection platform for robot learning in surgical settings. The system uses Augmented Reality (AR) hand tracking and a high-fidelity physics engine to capture subtle maneuvers in primitive surgical tasks: By eliminating the need for a physical robot setup and providing flexibility in terms of time, space, and hardware resources-such as multiview sensors and actuators-specialized simulation is a viable alternative. At the same time, AR allows the robot data collection to be more egocentric, supported by its body tracking and content overlaying capabilities. Our user study confirms the proposed system's efficiency and usability, where we use widely-used primitive tasks for training teleoperation with da Vinci surgical robots. Data throughput improves across all tasks compared to real robot settings by 41% on average. The total experiment time is reduced by an average of 10%. The temporal demand in the task load survey is improved. These gains are statistically significant. Additionally, the collected data is over 400 times smaller in size, requiring far less storage while achieving double the frequency.
A Digital Twin for Telesurgery under Intermittent Communication
Nov 20, 2024Telesurgery is an effective way to deliver service from expert surgeons to areas without immediate access to specialized resources. However, many of these areas, such as rural districts or battlefields, might be subject to different problems in communication, especially latency and intermittent periods of communication outage. This challenge motivates the use of a digital twin for the surgical system, where a simulation would mirror the robot hardware and surgical environment in the real world. The surgeon would then be able to interact with the digital twin during communication outage, followed by a recovery strategy on the real robot upon reestablishing communication. This paper builds the digital twin for the da Vinci surgical robot, with a buffering and replay strategy that reduces the mean task completion time by 23% when compared to the baseline, for a peg transfer task subject to intermittent communication outage.
StraightTrack: Towards Mixed Reality Navigation System for Percutaneous K-wire Insertion
Oct 02, 2024



In percutaneous pelvic trauma surgery, accurate placement of Kirschner wires (K-wires) is crucial to ensure effective fracture fixation and avoid complications due to breaching the cortical bone along an unsuitable trajectory. Surgical navigation via mixed reality (MR) can help achieve precise wire placement in a low-profile form factor. Current approaches in this domain are as yet unsuitable for real-world deployment because they fall short of guaranteeing accurate visual feedback due to uncontrolled bending of the wire. To ensure accurate feedback, we introduce StraightTrack, an MR navigation system designed for percutaneous wire placement in complex anatomy. StraightTrack features a marker body equipped with a rigid access cannula that mitigates wire bending due to interactions with soft tissue and a covered bony surface. Integrated with an Optical See-Through Head-Mounted Display (OST HMD) capable of tracking the cannula body, StraightTrack offers real-time 3D visualization and guidance without external trackers, which are prone to losing line-of-sight. In phantom experiments with two experienced orthopedic surgeons, StraightTrack improves wire placement accuracy, achieving the ideal trajectory within $5.26 \pm 2.29$ mm and $2.88 \pm 1.49$ degree, compared to over 12.08 mm and 4.07 degree for comparable methods. As MR navigation systems continue to mature, StraightTrack realizes their potential for internal fracture fixation and other percutaneous orthopedic procedures.