 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSOMA-1M: A Large-Scale SAR-Optical Multi-resolution Alignment Dataset for Multi-Task Remote Sensing
Feb 05, 2026Synthetic Aperture Radar (SAR) and optical imagery provide complementary strengths that constitute the critical foundation for transcending single-modality constraints and facilitating cross-modal collaborative processing and intelligent interpretation. However, existing benchmark datasets often suffer from limitations such as single spatial resolution, insufficient data scale, and low alignment accuracy, making them inadequate for supporting the training and generalization of multi-scale foundation models. To address these challenges, we introduce SOMA-1M (SAR-Optical Multi-resolution Alignment), a pixel-level precisely aligned dataset containing over 1.3 million pairs of georeferenced images with a specification of 512 x 512 pixels. This dataset integrates imagery from Sentinel-1, PIESAT-1, Capella Space, and Google Earth, achieving global multi-scale coverage from 0.5 m to 10 m. It encompasses 12 typical land cover categories, effectively ensuring scene diversity and complexity. To address multimodal projection deformation and massive data registration, we designed a rigorous coarse-to-fine image matching framework ensuring pixel-level alignment. Based on this dataset, we established comprehensive evaluation benchmarks for four hierarchical vision tasks, including image matching, image fusion, SAR-assisted cloud removal, and cross-modal translation, involving over 30 mainstream algorithms. Experimental results demonstrate that supervised training on SOMA-1M significantly enhances performance across all tasks. Notably, multimodal remote sensing image (MRSI) matching performance achieves current state-of-the-art (SOTA) levels. SOMA-1M serves as a foundational resource for robust multimodal algorithms and remote sensing foundation models. The dataset will be released publicly at: https://github.com/PeihaoWu/SOMA-1M.
GLEAM: Learning to Match and Explain in Cross-View Geo-Localization
Sep 09, 2025Cross-View Geo-Localization (CVGL) focuses on identifying correspondences between images captured from distinct perspectives of the same geographical location. However, existing CVGL approaches are typically restricted to a single view or modality, and their direct visual matching strategy lacks interpretability: they merely predict whether two images correspond, without explaining the rationale behind the match. In this paper, we present GLEAM-C, a foundational CVGL model that unifies multiple views and modalities-including UAV imagery, street maps, panoramic views, and ground photographs-by aligning them exclusively with satellite imagery. Our framework enhances training efficiency through optimized implementation while achieving accuracy comparable to prior modality-specific CVGL models through a two-phase training strategy. Moreover, to address the lack of interpretability in traditional CVGL methods, we leverage the reasoning capabilities of multimodal large language models (MLLMs) to propose a new task, GLEAM-X, which combines cross-view correspondence prediction with explainable reasoning. To support this task, we construct a bilingual benchmark using GPT-4o and Doubao-1.5-Thinking-Vision-Pro to generate training and testing data. The test set is further refined through detailed human revision, enabling systematic evaluation of explainable cross-view reasoning and advancing transparency and scalability in geo-localization. Together, GLEAM-C and GLEAM-X form a comprehensive CVGL pipeline that integrates multi-modal, multi-view alignment with interpretable correspondence analysis, unifying accurate cross-view matching with explainable reasoning and advancing Geo-Localization by enabling models to better Explain And Match. Code and datasets used in this work will be made publicly accessible at https://github.com/Lucky-Lance/GLEAM.
CasP: Improving Semi-Dense Feature Matching Pipeline Leveraging Cascaded Correspondence Priors for Guidance
Jul 23, 2025Semi-dense feature matching methods have shown strong performance in challenging scenarios. However, the existing pipeline relies on a global search across the entire feature map to establish coarse matches, limiting further improvements in accuracy and efficiency. Motivated by this limitation, we propose a novel pipeline, CasP, which leverages cascaded correspondence priors for guidance. Specifically, the matching stage is decomposed into two progressive phases, bridged by a region-based selective cross-attention mechanism designed to enhance feature discriminability. In the second phase, one-to-one matches are determined by restricting the search range to the one-to-many prior areas identified in the first phase. Additionally, this pipeline benefits from incorporating high-level features, which helps reduce the computational costs of low-level feature extraction. The acceleration gains of CasP increase with higher resolution, and our lite model achieves a speedup of $\sim2.2\times$ at a resolution of 1152 compared to the most efficient method, ELoFTR. Furthermore, extensive experiments demonstrate its superiority in geometric estimation, particularly with impressive cross-domain generalization. These advantages highlight its potential for latency-sensitive and high-robustness applications, such as SLAM and UAV systems. Code is available at https://github.com/pq-chen/CasP.
MapGlue: Multimodal Remote Sensing Image Matching
Mar 20, 2025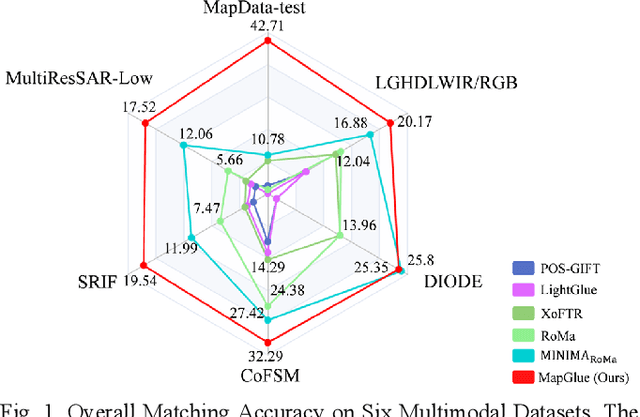
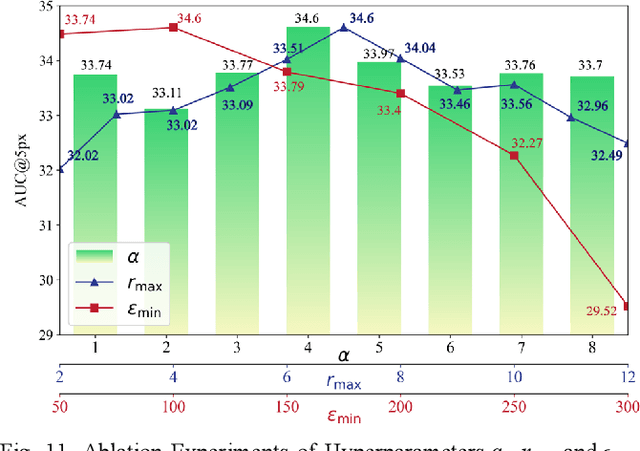
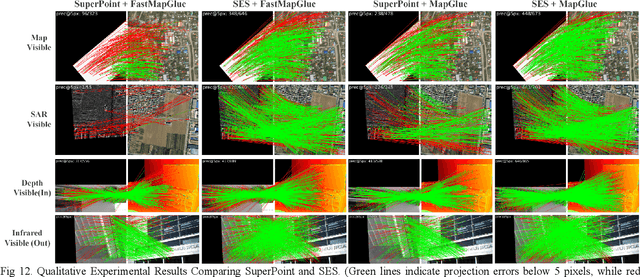
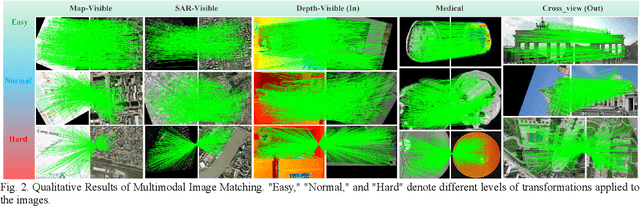
Multimodal remote sensing image (MRSI) matching is pivotal for cross-modal fusion, localization, and object detection, but it faces severe challenges due to geometric, radiometric, and viewpoint discrepancies across imaging modalities. Existing unimodal datasets lack scale and diversity, limiting deep learning solutions. This paper proposes MapGlue, a universal MRSI matching framework, and MapData, a large-scale multimodal dataset addressing these gaps. Our contributions are twofold. MapData, a globally diverse dataset spanning 233 sampling points, offers original images (7,000x5,000 to 20,000x15,000 pixels). After rigorous cleaning, it provides 121,781 aligned electronic map-visible image pairs (512x512 pixels) with hybrid manual-automated ground truth, addressing the scarcity of scalable multimodal benchmarks. MapGlue integrates semantic context with a dual graph-guided mechanism to extract cross-modal invariant features. This structure enables global-to-local interaction, enhancing descriptor robustness against modality-specific distortions. Extensive evaluations on MapData and five public datasets demonstrate MapGlue's superiority in matching accuracy under complex conditions, outperforming state-of-the-art methods. Notably, MapGlue generalizes effectively to unseen modalities without retraining, highlighting its adaptability. This work addresses longstanding challenges in MRSI matching by combining scalable dataset construction with a robust, semantics-driven framework. Furthermore, MapGlue shows strong generalization capabilities on other modality matching tasks for which it was not specifically trained. The dataset and code are available at https://github.com/PeihaoWu/MapGlue.
Multi-Resolution SAR and Optical Remote Sensing Image Registration Methods: A Review, Datasets, and Future Perspectives
Feb 03, 2025



Synthetic Aperture Radar (SAR) and optical image registration is essential for remote sensing data fusion, with applications in military reconnaissance, environmental monitoring, and disaster management. However, challenges arise from differences in imaging mechanisms, geometric distortions, and radiometric properties between SAR and optical images. As image resolution increases, fine SAR textures become more significant, leading to alignment issues and 3D spatial discrepancies. Two major gaps exist: the lack of a publicly available multi-resolution, multi-scene registration dataset and the absence of systematic analysis of current methods. To address this, the MultiResSAR dataset was created, containing over 10k pairs of multi-source, multi-resolution, and multi-scene SAR and optical images. Sixteen state-of-the-art algorithms were tested. Results show no algorithm achieves 100% success, and performance decreases as resolution increases, with most failing on sub-meter data. XoFTR performs best among deep learning methods (40.58%), while RIFT performs best among traditional methods (66.51%). Future research should focus on noise suppression, 3D geometric fusion, cross-view transformation modeling, and deep learning optimization for robust registration of high-resolution SAR and optical images. The dataset is available at https://github.com/betterlll/Multi-Resolution-SAR-dataset-.
Cross-View Geo-Localization with Street-View and VHR Satellite Imagery in Decentrality Settings
Dec 16, 2024Cross-View Geo-Localization tackles the problem of image geo-localization in GNSS-denied environments by matching street-view query images with geo-tagged aerial-view reference images. However, existing datasets and methods often assume center-aligned settings or only consider limited decentrality (i.e., the offset of the query image from the reference image center). This assumption overlooks the challenges present in real-world applications, where large decentrality can significantly enhance localization efficiency but simultaneously lead to a substantial degradation in localization accuracy. To address this limitation, we introduce CVSat, a novel dataset designed to evaluate cross-view geo-localization with a large geographic scope and diverse landscapes, emphasizing the decentrality issue. Meanwhile, we propose AuxGeo (Auxiliary Enhanced Geo-Localization), which leverages a multi-metric optimization strategy with two novel modules: the Bird's-eye view Intermediary Module (BIM) and the Position Constraint Module (PCM). BIM uses bird's-eye view images derived from street-view panoramas as an intermediary, simplifying the cross-view challenge with decentrality to a cross-view problem and a decentrality problem. PCM leverages position priors between cross-view images to establish multi-grained alignment constraints. These modules improve the performance of cross-view geo-localization with the decentrality problem. Extensive experiments demonstrate that AuxGeo outperforms previous methods on our proposed CVSat dataset, mitigating the issue of large decentrality, and also achieves state-of-the-art performance on existing public datasets such as CVUSA, CVACT, and VIGOR.
LiDAR-guided Stereo Matching with a Spatial Consistency Constraint
Feb 24, 2022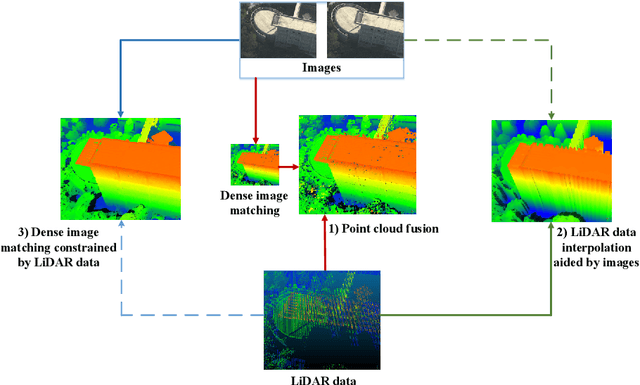
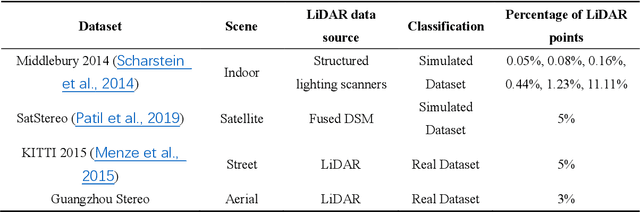
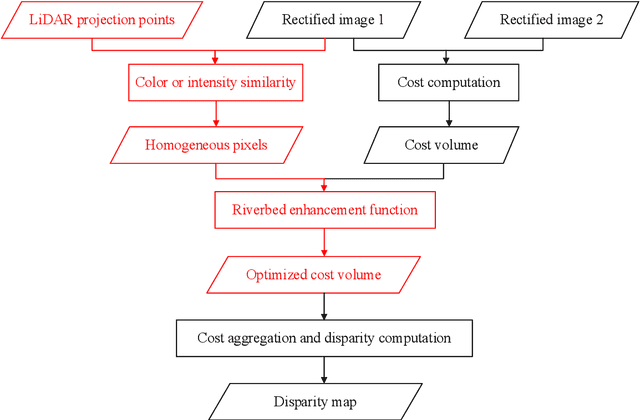
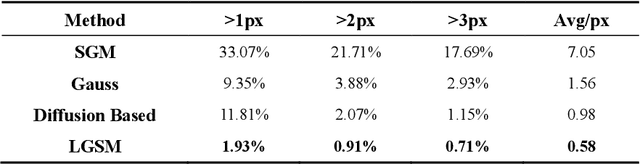
The complementary fusion of light detection and ranging (LiDAR) data and image data is a promising but challenging task for generating high-precision and high-density point clouds. This study proposes an innovative LiDAR-guided stereo matching approach called LiDAR-guided stereo matching (LGSM), which considers the spatial consistency represented by continuous disparity or depth changes in the homogeneous region of an image. The LGSM first detects the homogeneous pixels of each LiDAR projection point based on their color or intensity similarity. Next, we propose a riverbed enhancement function to optimize the cost volume of the LiDAR projection points and their homogeneous pixels to improve the matching robustness. Our formulation expands the constraint scopes of sparse LiDAR projection points with the guidance of image information to optimize the cost volume of pixels as much as possible. We applied LGSM to semi-global matching and AD-Census on both simulated and real datasets. When the percentage of LiDAR points in the simulated datasets was 0.16%, the matching accuracy of our method achieved a subpixel level, while that of the original stereo matching algorithm was 3.4 pixels. The experimental results show that LGSM is suitable for indoor, street, aerial, and satellite image datasets and provides good transferability across semi-global matching and AD-Census. Furthermore, the qualitative and quantitative evaluations demonstrate that LGSM is superior to two state-of-the-art optimizing cost volume methods, especially in reducing mismatches in difficult matching areas and refining the boundaries of objects.
* we replace an article because of the addition of journal reference, DOI, and report number information