 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiDAR-guided Stereo Matching with a Spatial Consistency Constraint
Paper and Code
Feb 24, 2022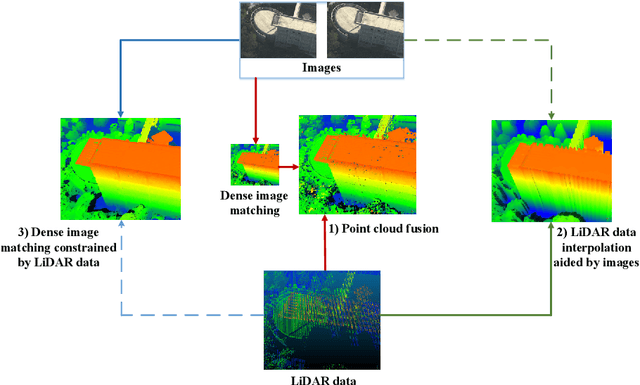
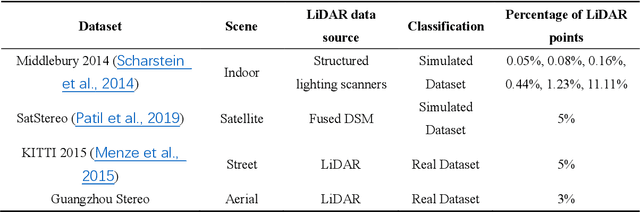
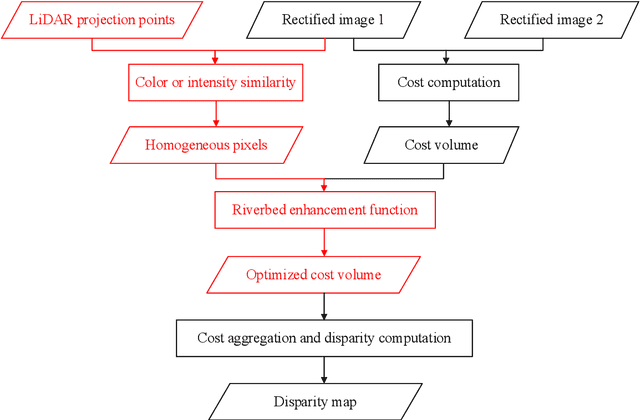
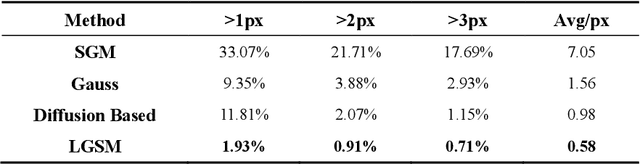
The complementary fusion of light detection and ranging (LiDAR) data and image data is a promising but challenging task for generating high-precision and high-density point clouds. This study proposes an innovative LiDAR-guided stereo matching approach called LiDAR-guided stereo matching (LGSM), which considers the spatial consistency represented by continuous disparity or depth changes in the homogeneous region of an image. The LGSM first detects the homogeneous pixels of each LiDAR projection point based on their color or intensity similarity. Next, we propose a riverbed enhancement function to optimize the cost volume of the LiDAR projection points and their homogeneous pixels to improve the matching robustness. Our formulation expands the constraint scopes of sparse LiDAR projection points with the guidance of image information to optimize the cost volume of pixels as much as possible. We applied LGSM to semi-global matching and AD-Census on both simulated and real datasets. When the percentage of LiDAR points in the simulated datasets was 0.16%, the matching accuracy of our method achieved a subpixel level, while that of the original stereo matching algorithm was 3.4 pixels. The experimental results show that LGSM is suitable for indoor, street, aerial, and satellite image datasets and provides good transferability across semi-global matching and AD-Census. Furthermore, the qualitative and quantitative evaluations demonstrate that LGSM is superior to two state-of-the-art optimizing cost volume methods, especially in reducing mismatches in difficult matching areas and refining the boundaries of objects.