 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVideo Anomaly Detection with Motion and Appearance Guided Patch Diffusion Model
Dec 12, 2024



A recent endeavor in one class of video anomaly detection is to leverage diffusion models and posit the task as a generation problem, where the diffusion model is trained to recover normal patterns exclusively, thus reporting abnormal patterns as outliers. Yet, existing attempts neglect the various formations of anomaly and predict normal samples at the feature level regardless that abnormal objects in surveillance videos are often relatively small. To address this, a novel patch-based diffusion model is proposed, specifically engineered to capture fine-grained local information. We further observe that anomalies in videos manifest themselves as deviations in both appearance and motion. Therefore, we argue that a comprehensive solution must consider both of these aspects simultaneously to achieve accurate frame prediction. To address this, we introduce innovative motion and appearance conditions that are seamlessly integrated into our patch diffusion model. These conditions are designed to guide the model in generating coherent and contextually appropriate predictions for both semantic content and motion relations. Experimental results in four challenging video anomaly detection datasets empirically substantiate the efficacy of our proposed approach, demonstrating that it consistently outperforms most existing methods in detecting abnormal behaviors.
Accurate and Robust Object-oriented SLAM with 3D Quadric Landmark Construction in Outdoor Environment
Oct 18, 2021



Object-oriented SLAM is a popular technology in autonomous driving and robotics. In this paper, we propose a stereo visual SLAM with a robust quadric landmark representation method. The system consists of four components, including deep learning detection, object-oriented data association, dual quadric landmark initialization and object-based pose optimization. State-of-the-art quadric-based SLAM algorithms always face observation related problems and are sensitive to observation noise, which limits their application in outdoor scenes. To solve this problem, we propose a quadric initialization method based on the decoupling of the quadric parameters method, which improves the robustness to observation noise. The sufficient object data association algorithm and object-oriented optimization with multiple cues enables a highly accurate object pose estimation that is robust to local observations. Experimental results show that the proposed system is more robust to observation noise and significantly outperforms current state-of-the-art methods in outdoor environments. In addition, the proposed system demonstrates real-time performance.
EAO-SLAM: Monocular Semi-Dense Object SLAM Based on Ensemble Data Association
Apr 27, 2020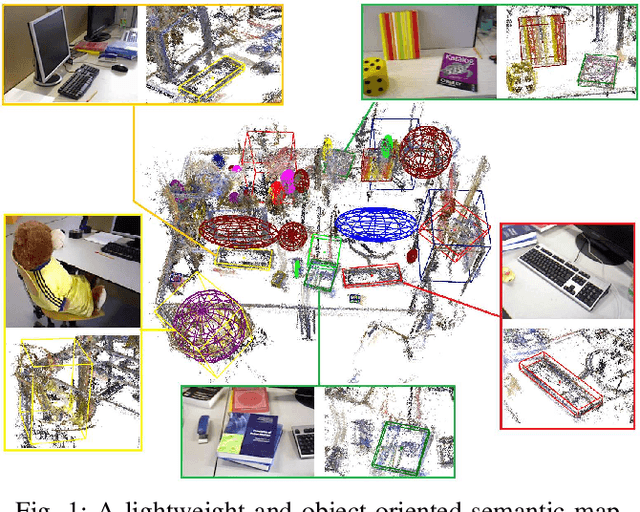
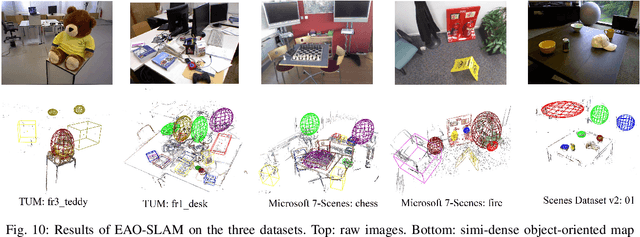
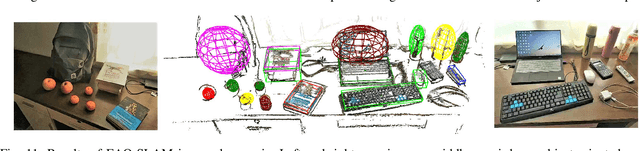
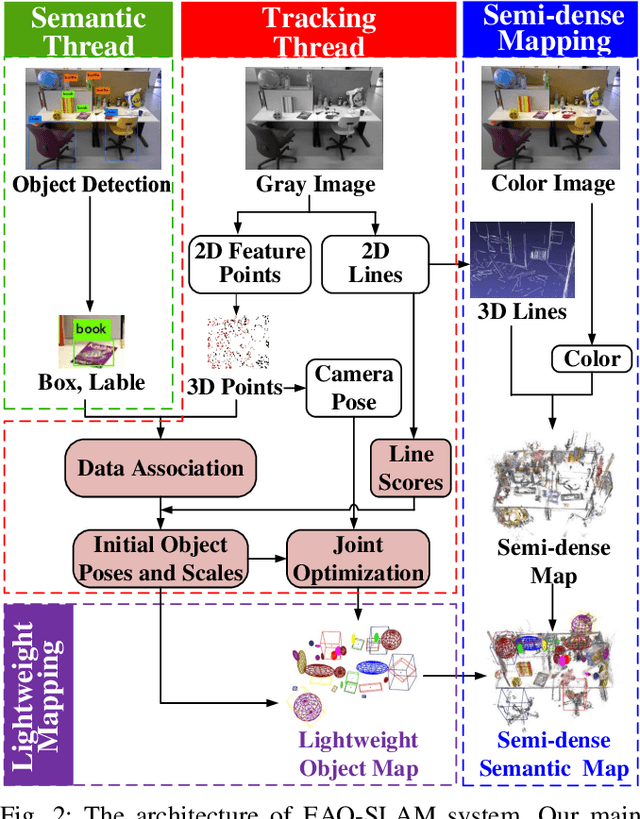
Object-level data association and pose estimation play a fundamental role in semantic SLAM, which remain unsolved due to the lack of robust and accurate algorithms. In this work, we propose an ensemble data associate strategy to integrate the parametric and nonparametric statistic tests. By exploiting the nature of different statistics, our method can effectively aggregate the information of different measurements, and thus significantly improve the robustness and accuracy of the association process. We then present an accurate object pose estimation framework, in which an outlier-robust centroid and scale estimation algorithm and an object pose initialization algorithm are developed to help improve the optimality of the estimated results. Furthermore, we build a SLAM system that can generate semi-dense or lightweight object-oriented maps with a monocular camera. Extensive experiments are conducted on three publicly available datasets and a real scenario. The results show that our approach significantly outperforms state-of-the-art techniques in accuracy and robustness.