 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePAS-SLAM: A Visual SLAM System for Planar Ambiguous Scenes
Feb 09, 2024Visual SLAM (Simultaneous Localization and Mapping) based on planar features has found widespread applications in fields such as environmental structure perception and augmented reality. However, current research faces challenges in accurately localizing and mapping in planar ambiguous scenes, primarily due to the poor accuracy of the employed planar features and data association methods. In this paper, we propose a visual SLAM system based on planar features designed for planar ambiguous scenes, encompassing planar processing, data association, and multi-constraint factor graph optimization. We introduce a planar processing strategy that integrates semantic information with planar features, extracting the edges and vertices of planes to be utilized in tasks such as plane selection, data association, and pose optimization. Next, we present an integrated data association strategy that combines plane parameters, semantic information, projection IoU (Intersection over Union), and non-parametric tests, achieving accurate and robust plane data association in planar ambiguous scenes. Finally, we design a set of multi-constraint factor graphs for camera pose optimization. Qualitative and quantitative experiments conducted on publicly available datasets demonstrate that our proposed system competes effectively in both accuracy and robustness in terms of map construction and camera localization compared to state-of-the-art methods.
UniQuadric: A SLAM Backend for Unknown Rigid Object 3D Tracking and Light-Weight Modeling
Oct 02, 2023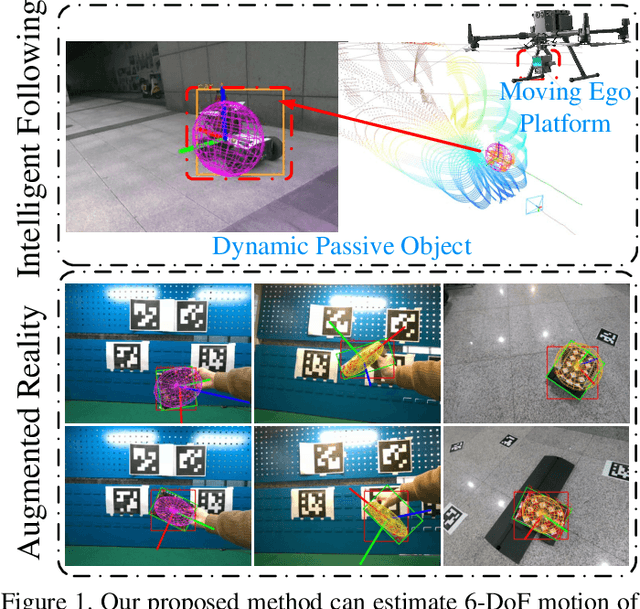



Tracking and modeling unknown rigid objects in the environment play a crucial role in autonomous unmanned systems and virtual-real interactive applications. However, many existing Simultaneous Localization, Mapping and Moving Object Tracking (SLAMMOT) methods focus solely on estimating specific object poses and lack estimation of object scales and are unable to effectively track unknown objects. In this paper, we propose a novel SLAM backend that unifies ego-motion tracking, rigid object motion tracking, and modeling within a joint optimization framework. In the perception part, we designed a pixel-level asynchronous object tracker (AOT) based on the Segment Anything Model (SAM) and DeAOT, enabling the tracker to effectively track target unknown objects guided by various predefined tasks and prompts. In the modeling part, we present a novel object-centric quadric parameterization to unify both static and dynamic object initialization and optimization. Subsequently, in the part of object state estimation, we propose a tightly coupled optimization model for object pose and scale estimation, incorporating hybrids constraints into a novel dual sliding window optimization framework for joint estimation. To our knowledge, we are the first to tightly couple object pose tracking with light-weight modeling of dynamic and static objects using quadric. We conduct qualitative and quantitative experiments on simulation datasets and real-world datasets, demonstrating the state-of-the-art robustness and accuracy in motion estimation and modeling. Our system showcases the potential application of object perception in complex dynamic scenes.
BSH-Det3D: Improving 3D Object Detection with BEV Shape Heatmap
Mar 03, 2023



The progress of LiDAR-based 3D object detection has significantly enhanced developments in autonomous driving and robotics. However, due to the limitations of LiDAR sensors, object shapes suffer from deterioration in occluded and distant areas, which creates a fundamental challenge to 3D perception. Existing methods estimate specific 3D shapes and achieve remarkable performance. However, these methods rely on extensive computation and memory, causing imbalances between accuracy and real-time performance. To tackle this challenge, we propose a novel LiDAR-based 3D object detection model named BSH-Det3D, which applies an effective way to enhance spatial features by estimating complete shapes from a bird's eye view (BEV). Specifically, we design the Pillar-based Shape Completion (PSC) module to predict the probability of occupancy whether a pillar contains object shapes. The PSC module generates a BEV shape heatmap for each scene. After integrating with heatmaps, BSH-Det3D can provide additional information in shape deterioration areas and generate high-quality 3D proposals. We also design an attention-based densification fusion module (ADF) to adaptively associate the sparse features with heatmaps and raw points. The ADF module integrates the advantages of points and shapes knowledge with negligible overheads. Extensive experiments on the KITTI benchmark achieve state-of-the-art (SOTA) performance in terms of accuracy and speed, demonstrating the efficiency and flexibility of BSH-Det3D. The source code is available on https://github.com/mystorm16/BSH-Det3D.
Accurate and Robust Object-oriented SLAM with 3D Quadric Landmark Construction in Outdoor Environment
Oct 18, 2021



Object-oriented SLAM is a popular technology in autonomous driving and robotics. In this paper, we propose a stereo visual SLAM with a robust quadric landmark representation method. The system consists of four components, including deep learning detection, object-oriented data association, dual quadric landmark initialization and object-based pose optimization. State-of-the-art quadric-based SLAM algorithms always face observation related problems and are sensitive to observation noise, which limits their application in outdoor scenes. To solve this problem, we propose a quadric initialization method based on the decoupling of the quadric parameters method, which improves the robustness to observation noise. The sufficient object data association algorithm and object-oriented optimization with multiple cues enables a highly accurate object pose estimation that is robust to local observations. Experimental results show that the proposed system is more robust to observation noise and significantly outperforms current state-of-the-art methods in outdoor environments. In addition, the proposed system demonstrates real-time performance.