 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniQuadric: A SLAM Backend for Unknown Rigid Object 3D Tracking and Light-Weight Modeling
Oct 02, 2023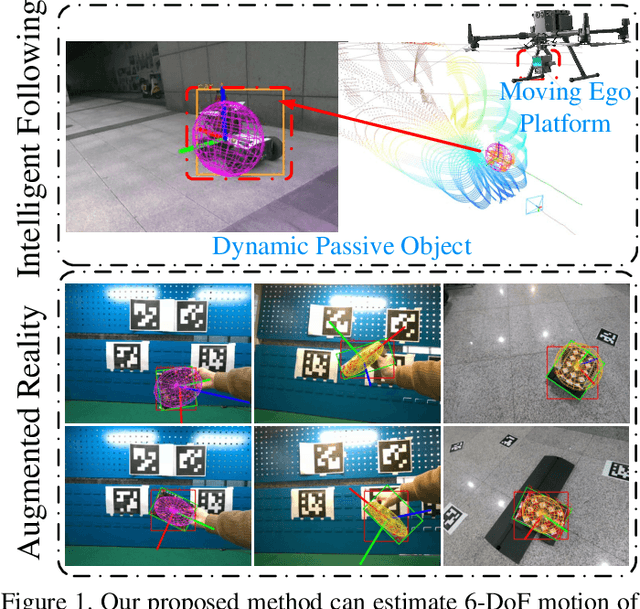



Tracking and modeling unknown rigid objects in the environment play a crucial role in autonomous unmanned systems and virtual-real interactive applications. However, many existing Simultaneous Localization, Mapping and Moving Object Tracking (SLAMMOT) methods focus solely on estimating specific object poses and lack estimation of object scales and are unable to effectively track unknown objects. In this paper, we propose a novel SLAM backend that unifies ego-motion tracking, rigid object motion tracking, and modeling within a joint optimization framework. In the perception part, we designed a pixel-level asynchronous object tracker (AOT) based on the Segment Anything Model (SAM) and DeAOT, enabling the tracker to effectively track target unknown objects guided by various predefined tasks and prompts. In the modeling part, we present a novel object-centric quadric parameterization to unify both static and dynamic object initialization and optimization. Subsequently, in the part of object state estimation, we propose a tightly coupled optimization model for object pose and scale estimation, incorporating hybrids constraints into a novel dual sliding window optimization framework for joint estimation. To our knowledge, we are the first to tightly couple object pose tracking with light-weight modeling of dynamic and static objects using quadric. We conduct qualitative and quantitative experiments on simulation datasets and real-world datasets, demonstrating the state-of-the-art robustness and accuracy in motion estimation and modeling. Our system showcases the potential application of object perception in complex dynamic scenes.
PaVa: a novel Path-based Valley-seeking clustering algorithm
Jun 13, 2023Clustering methods are being applied to a wider range of scenarios involving more complex datasets, where the shapes of clusters tend to be arbitrary. In this paper, we propose a novel Path-based Valley-seeking clustering algorithm for arbitrarily shaped clusters. This work aims to seek the valleys among clusters and then individually extract clusters. Three vital techniques are used in this algorithm. First, path distance (minmax distance) is employed to transform the irregular boundaries among clusters, that is density valleys, into perfect spherical shells. Second, a suitable density measurement, $k$-distance, is employed to make adjustment on Minimum Spanning Tree, by which a robust minmax distance is calculated. Third, we seek the transformed density valleys by determining their centers and radius. First, the clusters are wrapped in spherical shells after the distance transformation, making the extraction process efficient even with clusters of arbitrary shape. Second, adjusted Minimum Spanning Tree enhances the robustness of minmax distance under different kinds of noise. Last, the number of clusters does not need to be inputted or decided manually due to the individual extraction process. After applying the proposed algorithm to several commonly used synthetic datasets, the results indicate that the Path-based Valley-seeking algorithm is accurate and efficient. The algorithm is based on the dissimilarity of objects, so it can be applied to a wide range of fields. Its performance on real-world datasets illustrates its versatility.