 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScene Modeling of Autonomous Vehicles Avoiding Stationary and Moving Vehicles on Narrow Roads
Dec 19, 2024



Navigating narrow roads with oncoming vehicles is a significant challenge that has garnered considerable public interest. These scenarios often involve sections that cannot accommodate two moving vehicles simultaneously due to the presence of stationary vehicles or limited road width. Autonomous vehicles must therefore profoundly comprehend their surroundings to identify passable areas and execute sophisticated maneuvers. To address this issue, this paper presents a comprehensive model for such an intricate scenario. The primary contribution is the principle of road width occupancy minimization, which models the narrow road problem and identifies candidate meeting gaps. Additionally, the concept of homology classes is introduced to help initialize and optimize candidate trajectories, while evaluation strategies are developed to select the optimal gap and most efficient trajectory. Qualitative and quantitative simulations demonstrate that the proposed approach, SM-NR, achieves high scene pass rates, efficient movement, and robust decisions. Experiments conducted in tiny gap scenarios and conflict scenarios reveal that the autonomous vehicle can robustly select meeting gaps and trajectories, compromising flexibly for safety while advancing bravely for efficiency.
RGBDS-SLAM: A RGB-D Semantic Dense SLAM Based on 3D Multi Level Pyramid Gaussian Splatting
Dec 02, 2024High-quality reconstruction is crucial for dense SLAM. Recent popular approaches utilize 3D Gaussian Splatting (3D GS) techniques for RGB, depth, and semantic reconstruction of scenes. However, these methods often overlook issues of detail and consistency in different parts of the scene. To address this, we propose RGBDS-SLAM, a RGB-D semantic dense SLAM system based on 3D multi-level pyramid gaussian splatting, which enables high-quality dense reconstruction of scene RGB, depth, and semantics.In this system, we introduce a 3D multi-level pyramid gaussian splatting method that restores scene details by extracting multi-level image pyramids for gaussian splatting training, ensuring consistency in RGB, depth, and semantic reconstructions. Additionally, we design a tightly-coupled multi-features reconstruction optimization mechanism, allowing the reconstruction accuracy of RGB, depth, and semantic maps to mutually enhance each other during the rendering optimization process. Extensive quantitative, qualitative, and ablation experiments on the Replica and ScanNet public datasets demonstrate that our proposed method outperforms current state-of-the-art methods. The open-source code will be available at: https://github.com/zhenzhongcao/RGBDS-SLAM.
SemanticTopoLoop: Semantic Loop Closure With 3D Topological Graph Based on Quadric-Level Object Map
Nov 09, 2023Loop closure, as one of the crucial components in SLAM, plays an essential role in correcting the accumulated errors. Traditional appearance-based methods, such as bag-of-words models, are often limited by local 2D features and the volume of training data, making them less versatile and robust in real-world scenarios, leading to missed detections or false positives detections in loop closure. To address these issues, we first propose a object-level data association method based on multi-level verification, which can associate 2D semantic features of current frame with 3D objects landmarks of map. Next, taking advantage of these association relations, we introduce a semantic loop closure method based on quadric-level object map topology, which represents scenes through the topological graph of objects and achieves accurate loop closure at a wide field of view by comparing differences in the topological graphs. Finally, we integrate these two methods into a complete object-aware SLAM system. Qualitative experiments and ablation studies demonstrate the effectiveness and robustness of the proposed object-level data association algorithm. Quantitative experiments show that our semantic loop closure method outperforms existing state-of-the-art methods in terms of precision, recall and localization accuracy metrics.
DYP-SLAM: A Real-time Visual SLAM Based on YOLO and Probability in Dynamic Environments
Feb 04, 2022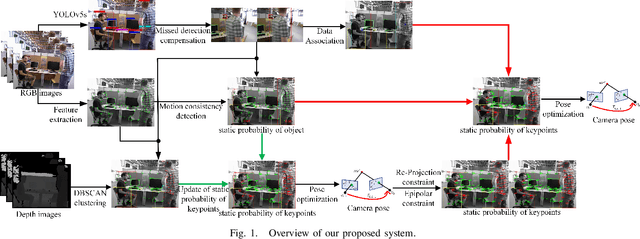
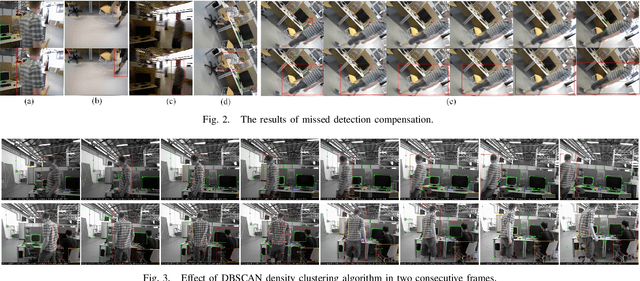
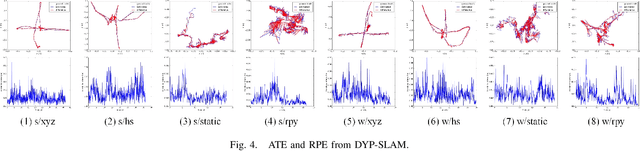
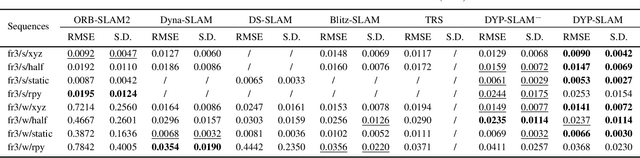
SLAM algorithm is based on the static assumption of environment. Therefore, the dynamic factors in the environment will have a great impact on the matching points due to violating this assumption, and then directly affect the accuracy of subsequent camera pose estimation. Recently, some related works generally use the combination of semantic constraints and geometric constraints to deal with dynamic objects, but there are some problems, such as poor real-time performance, easy to treat people as rigid bodies, and poor performance in low dynamic scenes. In this paper, a dynamic scene oriented visual SLAM algorithm based on target detection and static probability named DYP-SLAM is proposed. The algorithm combines semantic constraints and geometric constraints to calculate the static probability of objects, keypoints and map points, and takes them as weights to participate in camera pose estimation. The proposed algorithm is evaluated on the public dataset and compared with a variety of advanced algorithms. It has achieved the best results in almost all low dynamics and high dynamic scenarios, and showing quite high real-time.
Accurate and Robust Object-oriented SLAM with 3D Quadric Landmark Construction in Outdoor Environment
Oct 18, 2021



Object-oriented SLAM is a popular technology in autonomous driving and robotics. In this paper, we propose a stereo visual SLAM with a robust quadric landmark representation method. The system consists of four components, including deep learning detection, object-oriented data association, dual quadric landmark initialization and object-based pose optimization. State-of-the-art quadric-based SLAM algorithms always face observation related problems and are sensitive to observation noise, which limits their application in outdoor scenes. To solve this problem, we propose a quadric initialization method based on the decoupling of the quadric parameters method, which improves the robustness to observation noise. The sufficient object data association algorithm and object-oriented optimization with multiple cues enables a highly accurate object pose estimation that is robust to local observations. Experimental results show that the proposed system is more robust to observation noise and significantly outperforms current state-of-the-art methods in outdoor environments. In addition, the proposed system demonstrates real-time performance.