 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEAO-SLAM: Monocular Semi-Dense Object SLAM Based on Ensemble Data Association
Paper and Code
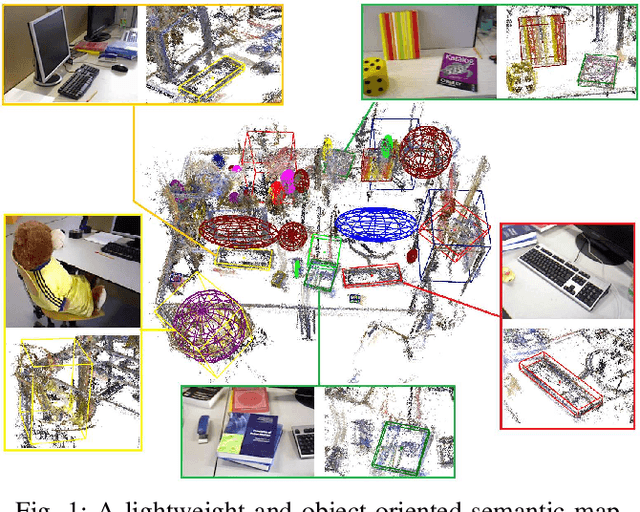
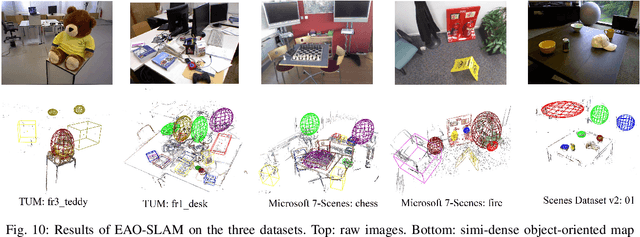
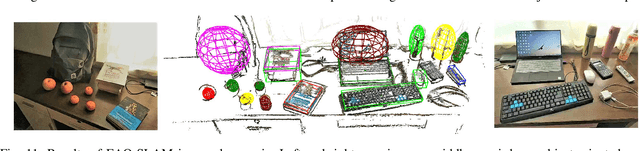
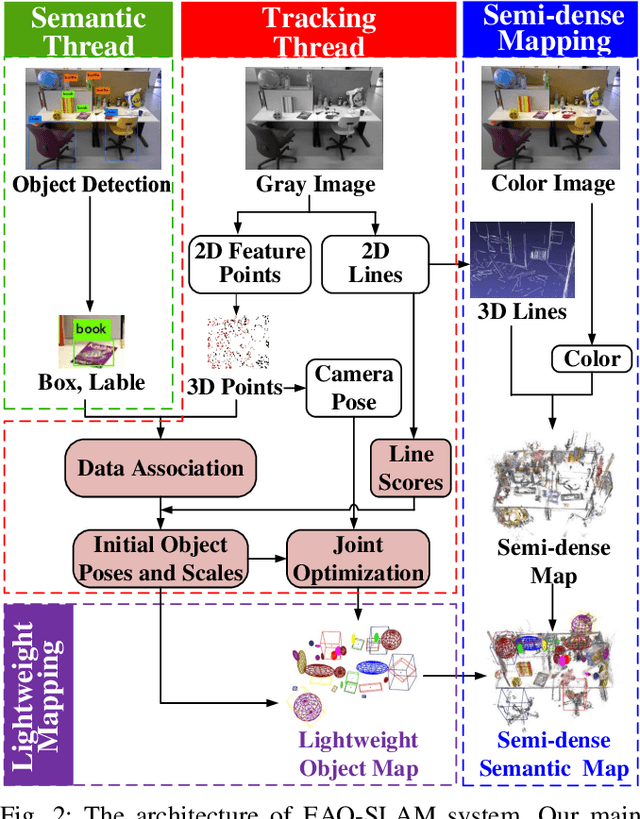
Object-level data association and pose estimation play a fundamental role in semantic SLAM, which remain unsolved due to the lack of robust and accurate algorithms. In this work, we propose an ensemble data associate strategy to integrate the parametric and nonparametric statistic tests. By exploiting the nature of different statistics, our method can effectively aggregate the information of different measurements, and thus significantly improve the robustness and accuracy of the association process. We then present an accurate object pose estimation framework, in which an outlier-robust centroid and scale estimation algorithm and an object pose initialization algorithm are developed to help improve the optimality of the estimated results. Furthermore, we build a SLAM system that can generate semi-dense or lightweight object-oriented maps with a monocular camera. Extensive experiments are conducted on three publicly available datasets and a real scenario. The results show that our approach significantly outperforms state-of-the-art techniques in accuracy and robustness.