 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLanguage Movement Primitives: Grounding Language Models in Robot Motion
Feb 02, 2026Enabling robots to perform novel manipulation tasks from natural language instructions remains a fundamental challenge in robotics, despite significant progress in generalized problem solving with foundational models. Large vision and language models (VLMs) are capable of processing high-dimensional input data for visual scene and language understanding, as well as decomposing tasks into a sequence of logical steps; however, they struggle to ground those steps in embodied robot motion. On the other hand, robotics foundation models output action commands, but require in-domain fine-tuning or experience before they are able to perform novel tasks successfully. At its core, there still remains the fundamental challenge of connecting abstract task reasoning with low-level motion control. To address this disconnect, we propose Language Movement Primitives (LMPs), a framework that grounds VLM reasoning in Dynamic Movement Primitive (DMP) parameterization. Our key insight is that DMPs provide a small number of interpretable parameters, and VLMs can set these parameters to specify diverse, continuous, and stable trajectories. Put another way: VLMs can reason over free-form natural language task descriptions, and semantically ground their desired motions into DMPs -- bridging the gap between high-level task reasoning and low-level position and velocity control. Building on this combination of VLMs and DMPs, we formulate our LMP pipeline for zero-shot robot manipulation that effectively completes tabletop manipulation problems by generating a sequence of DMP motions. Across 20 real-world manipulation tasks, we show that LMP achieves 80% task success as compared to 31% for the best-performing baseline. See videos at our website: https://collab.me.vt.edu/lmp
CIVIL: Causal and Intuitive Visual Imitation Learning
Apr 24, 2025



Today's robots learn new tasks by imitating human examples. However, this standard approach to visual imitation learning is fundamentally limited: the robot observes what the human does, but not why the human chooses those behaviors. Without understanding the features that factor into the human's decisions, robot learners often misinterpret the data and fail to perform the task when the environment changes. We therefore propose a shift in perspective: instead of asking human teachers just to show what actions the robot should take, we also enable humans to indicate task-relevant features using markers and language prompts. Our proposed algorithm, CIVIL, leverages this augmented data to filter the robot's visual observations and extract a feature representation that causally informs human actions. CIVIL then applies these causal features to train a transformer-based policy that emulates human behaviors without being confused by visual distractors. Our simulations, real-world experiments, and user study demonstrate that robots trained with CIVIL can learn from fewer human demonstrations and perform better than state-of-the-art baselines, especially in previously unseen scenarios. See videos at our project website: https://civil2025.github.io
Bridging the Human to Robot Dexterity Gap through Object-Oriented Rewards
Oct 30, 2024



Training robots directly from human videos is an emerging area in robotics and computer vision. While there has been notable progress with two-fingered grippers, learning autonomous tasks for multi-fingered robot hands in this way remains challenging. A key reason for this difficulty is that a policy trained on human hands may not directly transfer to a robot hand due to morphology differences. In this work, we present HuDOR, a technique that enables online fine-tuning of policies by directly computing rewards from human videos. Importantly, this reward function is built using object-oriented trajectories derived from off-the-shelf point trackers, providing meaningful learning signals despite the morphology gap and visual differences between human and robot hands. Given a single video of a human solving a task, such as gently opening a music box, HuDOR enables our four-fingered Allegro hand to learn the task with just an hour of online interaction. Our experiments across four tasks show that HuDOR achieves a 4x improvement over baselines. Code and videos are available on our website, https://object-rewards.github.io.
OPEN TEACH: A Versatile Teleoperation System for Robotic Manipulation
Mar 12, 2024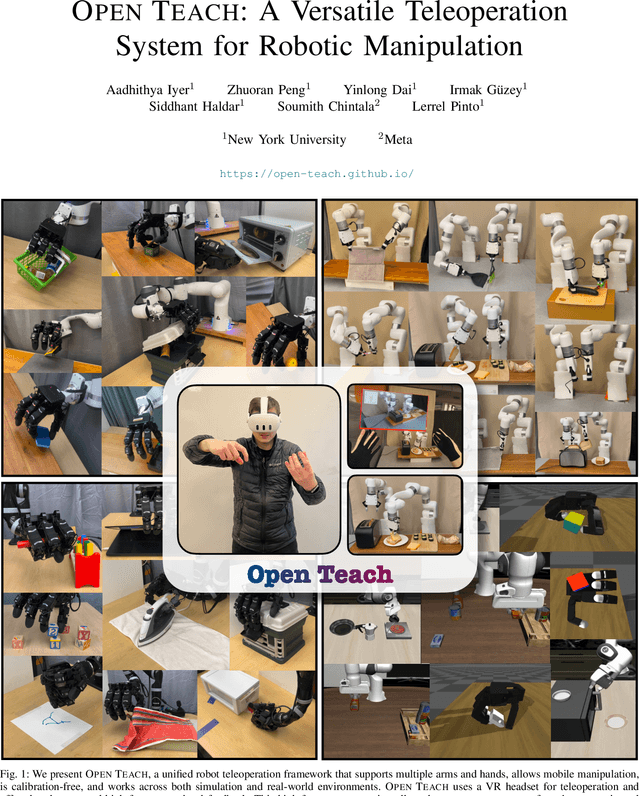
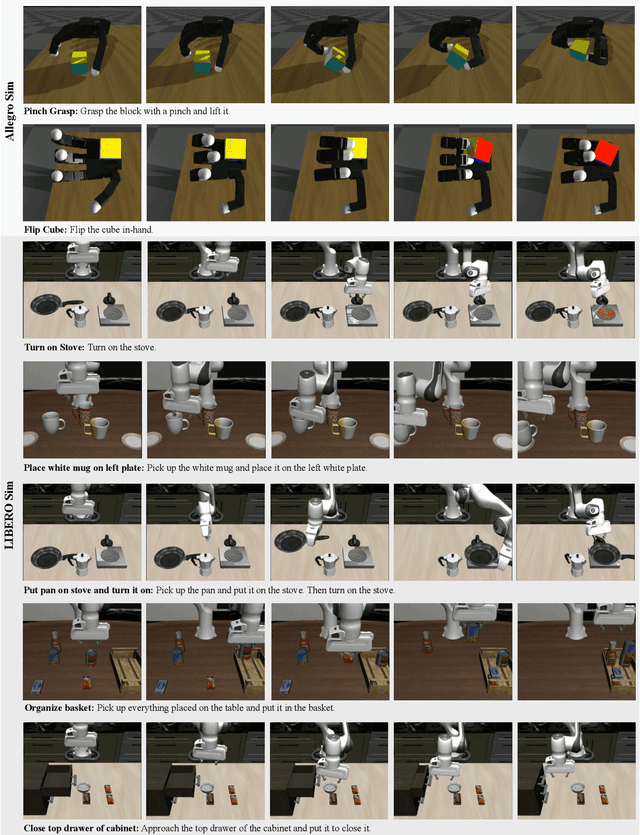
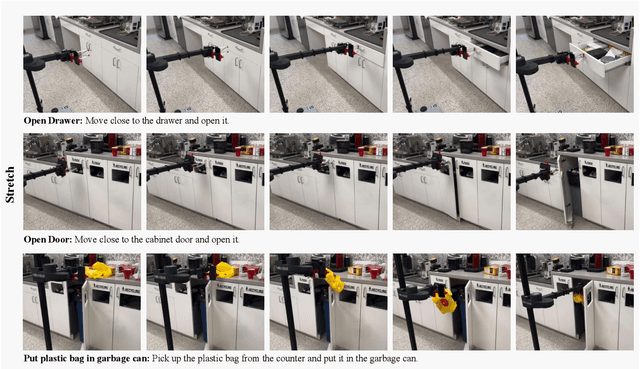
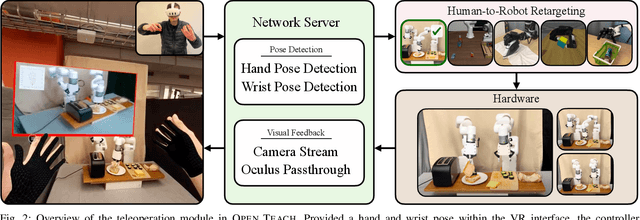
Open-sourced, user-friendly tools form the bedrock of scientific advancement across disciplines. The widespread adoption of data-driven learning has led to remarkable progress in multi-fingered dexterity, bimanual manipulation, and applications ranging from logistics to home robotics. However, existing data collection platforms are often proprietary, costly, or tailored to specific robotic morphologies. We present OPEN TEACH, a new teleoperation system leveraging VR headsets to immerse users in mixed reality for intuitive robot control. Built on the affordable Meta Quest 3, which costs $500, OPEN TEACH enables real-time control of various robots, including multi-fingered hands and bimanual arms, through an easy-to-use app. Using natural hand gestures and movements, users can manipulate robots at up to 90Hz with smooth visual feedback and interface widgets offering closeup environment views. We demonstrate the versatility of OPEN TEACH across 38 tasks on different robots. A comprehensive user study indicates significant improvement in teleoperation capability over the AnyTeleop framework. Further experiments exhibit that the collected data is compatible with policy learning on 10 dexterous and contact-rich manipulation tasks. Currently supporting Franka, xArm, Jaco, and Allegro platforms, OPEN TEACH is fully open-sourced to promote broader adoption. Videos are available at https://open-teach.github.io/.
See to Touch: Learning Tactile Dexterity through Visual Incentives
Sep 21, 2023



Equipping multi-fingered robots with tactile sensing is crucial for achieving the precise, contact-rich, and dexterous manipulation that humans excel at. However, relying solely on tactile sensing fails to provide adequate cues for reasoning about objects' spatial configurations, limiting the ability to correct errors and adapt to changing situations. In this paper, we present Tactile Adaptation from Visual Incentives (TAVI), a new framework that enhances tactile-based dexterity by optimizing dexterous policies using vision-based rewards. First, we use a contrastive-based objective to learn visual representations. Next, we construct a reward function using these visual representations through optimal-transport based matching on one human demonstration. Finally, we use online reinforcement learning on our robot to optimize tactile-based policies that maximize the visual reward. On six challenging tasks, such as peg pick-and-place, unstacking bowls, and flipping slender objects, TAVI achieves a success rate of 73% using our four-fingered Allegro robot hand. The increase in performance is 108% higher than policies using tactile and vision-based rewards and 135% higher than policies without tactile observational input. Robot videos are best viewed on our project website: https://see-to-touch.github.io/.