 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFauna Sprout: A lightweight, approachable, developer-ready humanoid robot
Jan 26, 2026Recent advances in learned control, large-scale simulation, and generative models have accelerated progress toward general-purpose robotic controllers, yet the field still lacks platforms suitable for safe, expressive, long-term deployment in human environments. Most existing humanoids are either closed industrial systems or academic prototypes that are difficult to deploy and operate around people, limiting progress in robotics. We introduce Sprout, a developer platform designed to address these limitations through an emphasis on safety, expressivity, and developer accessibility. Sprout adopts a lightweight form factor with compliant control, limited joint torques, and soft exteriors to support safe operation in shared human spaces. The platform integrates whole-body control, manipulation with integrated grippers, and virtual-reality-based teleoperation within a unified hardware-software stack. An expressive head further enables social interaction -- a domain that remains underexplored on most utilitarian humanoids. By lowering physical and technical barriers to deployment, Sprout expands access to capable humanoid platforms and provides a practical basis for developing embodied intelligence in real human environments.
RUKA: Rethinking the Design of Humanoid Hands with Learning
Apr 17, 2025Dexterous manipulation is a fundamental capability for robotic systems, yet progress has been limited by hardware trade-offs between precision, compactness, strength, and affordability. Existing control methods impose compromises on hand designs and applications. However, learning-based approaches present opportunities to rethink these trade-offs, particularly to address challenges with tendon-driven actuation and low-cost materials. This work presents RUKA, a tendon-driven humanoid hand that is compact, affordable, and capable. Made from 3D-printed parts and off-the-shelf components, RUKA has 5 fingers with 15 underactuated degrees of freedom enabling diverse human-like grasps. Its tendon-driven actuation allows powerful grasping in a compact, human-sized form factor. To address control challenges, we learn joint-to-actuator and fingertip-to-actuator models from motion-capture data collected by the MANUS glove, leveraging the hand's morphological accuracy. Extensive evaluations demonstrate RUKA's superior reachability, durability, and strength compared to other robotic hands. Teleoperation tasks further showcase RUKA's dexterous movements. The open-source design and assembly instructions of RUKA, code, and data are available at https://ruka-hand.github.io/.
DynaMo: In-Domain Dynamics Pretraining for Visuo-Motor Control
Sep 18, 2024



Imitation learning has proven to be a powerful tool for training complex visuomotor policies. However, current methods often require hundreds to thousands of expert demonstrations to handle high-dimensional visual observations. A key reason for this poor data efficiency is that visual representations are predominantly either pretrained on out-of-domain data or trained directly through a behavior cloning objective. In this work, we present DynaMo, a new in-domain, self-supervised method for learning visual representations. Given a set of expert demonstrations, we jointly learn a latent inverse dynamics model and a forward dynamics model over a sequence of image embeddings, predicting the next frame in latent space, without augmentations, contrastive sampling, or access to ground truth actions. Importantly, DynaMo does not require any out-of-domain data such as Internet datasets or cross-embodied datasets. On a suite of six simulated and real environments, we show that representations learned with DynaMo significantly improve downstream imitation learning performance over prior self-supervised learning objectives, and pretrained representations. Gains from using DynaMo hold across policy classes such as Behavior Transformer, Diffusion Policy, MLP, and nearest neighbors. Finally, we ablate over key components of DynaMo and measure its impact on downstream policy performance. Robot videos are best viewed at https://dynamo-ssl.github.io
OPEN TEACH: A Versatile Teleoperation System for Robotic Manipulation
Mar 12, 2024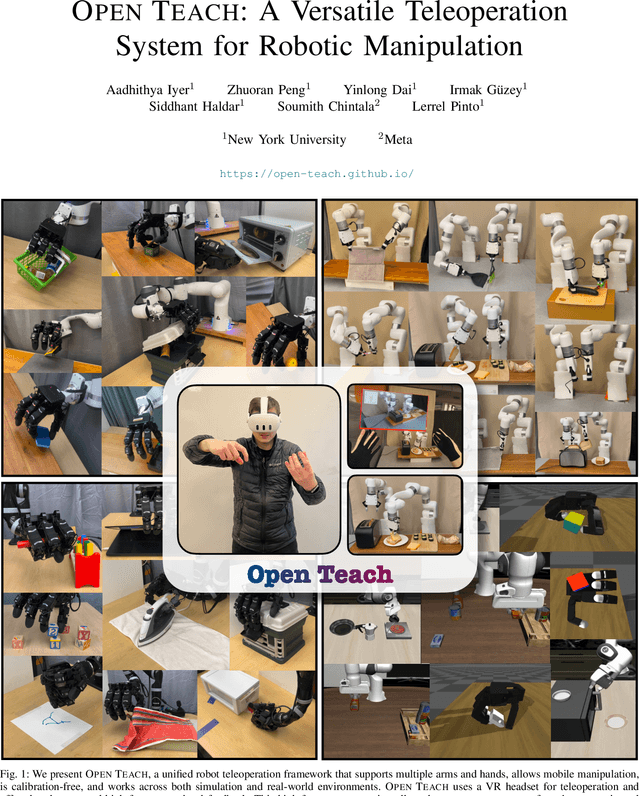
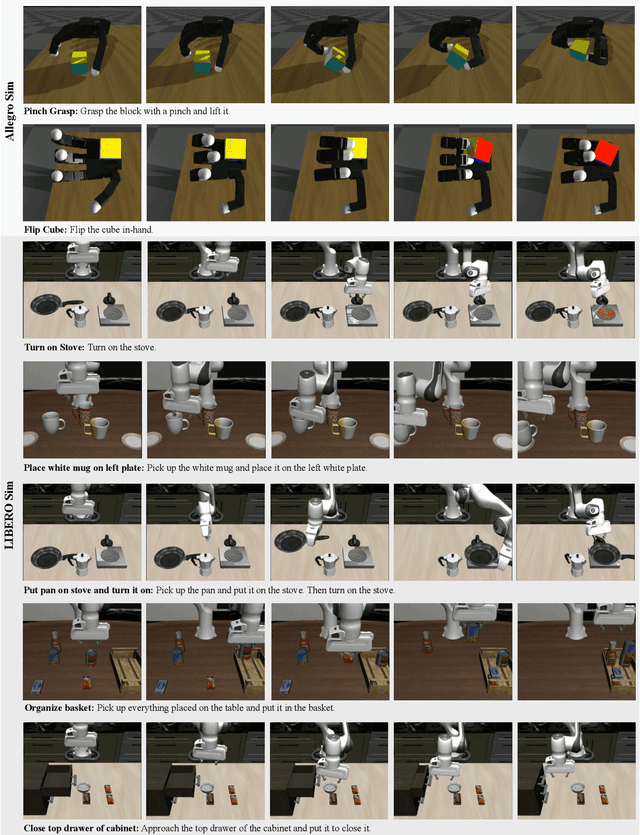
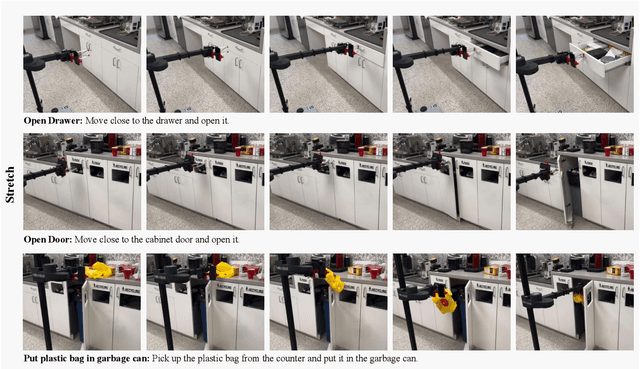
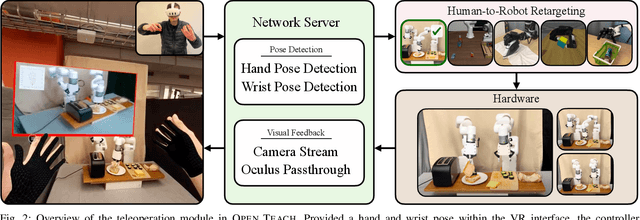
Open-sourced, user-friendly tools form the bedrock of scientific advancement across disciplines. The widespread adoption of data-driven learning has led to remarkable progress in multi-fingered dexterity, bimanual manipulation, and applications ranging from logistics to home robotics. However, existing data collection platforms are often proprietary, costly, or tailored to specific robotic morphologies. We present OPEN TEACH, a new teleoperation system leveraging VR headsets to immerse users in mixed reality for intuitive robot control. Built on the affordable Meta Quest 3, which costs $500, OPEN TEACH enables real-time control of various robots, including multi-fingered hands and bimanual arms, through an easy-to-use app. Using natural hand gestures and movements, users can manipulate robots at up to 90Hz with smooth visual feedback and interface widgets offering closeup environment views. We demonstrate the versatility of OPEN TEACH across 38 tasks on different robots. A comprehensive user study indicates significant improvement in teleoperation capability over the AnyTeleop framework. Further experiments exhibit that the collected data is compatible with policy learning on 10 dexterous and contact-rich manipulation tasks. Currently supporting Franka, xArm, Jaco, and Allegro platforms, OPEN TEACH is fully open-sourced to promote broader adoption. Videos are available at https://open-teach.github.io/.
Open-Set Multi-Source Multi-Target Domain Adaptation
Feb 03, 2023
Single-Source Single-Target Domain Adaptation (1S1T) aims to bridge the gap between a labelled source domain and an unlabelled target domain. Despite 1S1T being a well-researched topic, they are typically not deployed to the real world. Methods like Multi-Source Domain Adaptation and Multi-Target Domain Adaptation have evolved to model real-world problems but still do not generalise well. The fact that most of these methods assume a common label-set between source and target is very restrictive. Recent Open-Set Domain Adaptation methods handle unknown target labels but fail to generalise in multiple domains. To overcome these difficulties, first, we propose a novel generic domain adaptation (DA) setting named Open-Set Multi-Source Multi-Target Domain Adaptation (OS-nSmT), with n and m being number of source and target domains respectively. Next, we propose a graph attention based framework named DEGAA which can capture information from multiple source and target domains without knowing the exact label-set of the target. We argue that our method, though offered for multiple sources and multiple targets, can also be agnostic to various other DA settings. To check the robustness and versatility of DEGAA, we put forward ample experiments and ablation studies.