 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynaMo: In-Domain Dynamics Pretraining for Visuo-Motor Control
Sep 18, 2024



Imitation learning has proven to be a powerful tool for training complex visuomotor policies. However, current methods often require hundreds to thousands of expert demonstrations to handle high-dimensional visual observations. A key reason for this poor data efficiency is that visual representations are predominantly either pretrained on out-of-domain data or trained directly through a behavior cloning objective. In this work, we present DynaMo, a new in-domain, self-supervised method for learning visual representations. Given a set of expert demonstrations, we jointly learn a latent inverse dynamics model and a forward dynamics model over a sequence of image embeddings, predicting the next frame in latent space, without augmentations, contrastive sampling, or access to ground truth actions. Importantly, DynaMo does not require any out-of-domain data such as Internet datasets or cross-embodied datasets. On a suite of six simulated and real environments, we show that representations learned with DynaMo significantly improve downstream imitation learning performance over prior self-supervised learning objectives, and pretrained representations. Gains from using DynaMo hold across policy classes such as Behavior Transformer, Diffusion Policy, MLP, and nearest neighbors. Finally, we ablate over key components of DynaMo and measure its impact on downstream policy performance. Robot videos are best viewed at https://dynamo-ssl.github.io
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
From Play to Policy: Conditional Behavior Generation from Uncurated Robot Data
Oct 19, 2022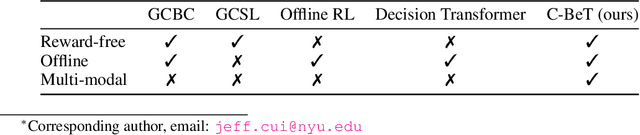
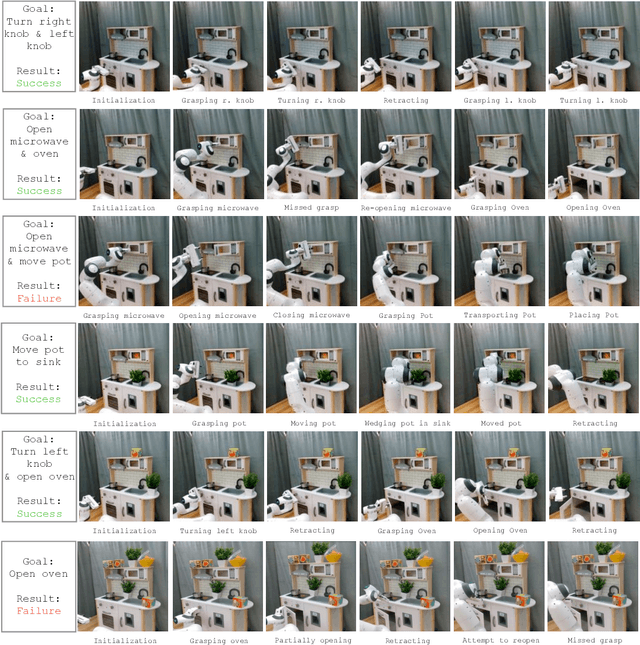
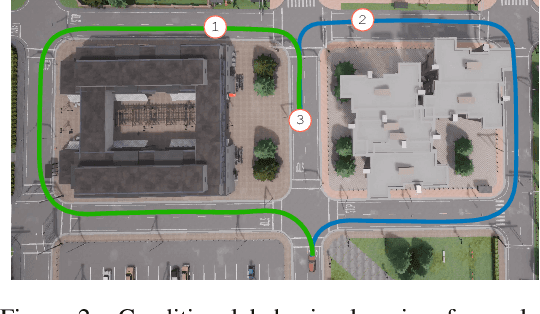

While large-scale sequence modeling from offline data has led to impressive performance gains in natural language and image generation, directly translating such ideas to robotics has been challenging. One critical reason for this is that uncurated robot demonstration data, i.e. play data, collected from non-expert human demonstrators are often noisy, diverse, and distributionally multi-modal. This makes extracting useful, task-centric behaviors from such data a difficult generative modeling problem. In this work, we present Conditional Behavior Transformers (C-BeT), a method that combines the multi-modal generation ability of Behavior Transformer with future-conditioned goal specification. On a suite of simulated benchmark tasks, we find that C-BeT improves upon prior state-of-the-art work in learning from play data by an average of 45.7%. Further, we demonstrate for the first time that useful task-centric behaviors can be learned on a real-world robot purely from play data without any task labels or reward information. Robot videos are best viewed on our project website: https://play-to-policy.github.io
Behavior Transformers: Cloning $k$ modes with one stone
Jun 22, 2022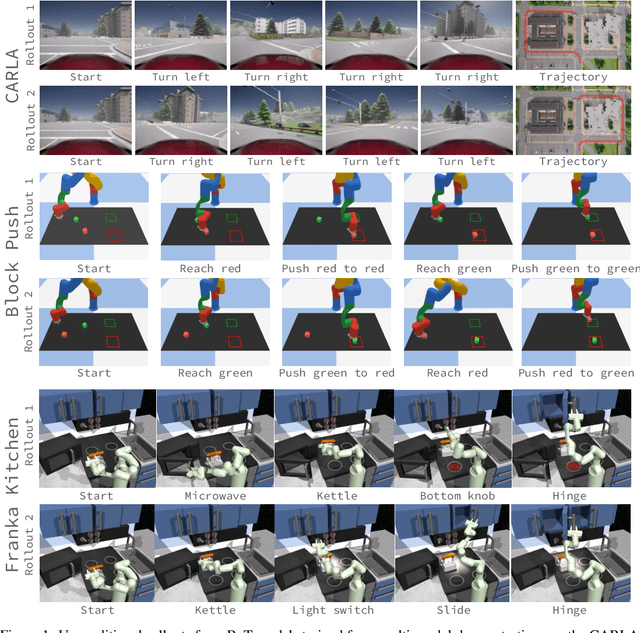
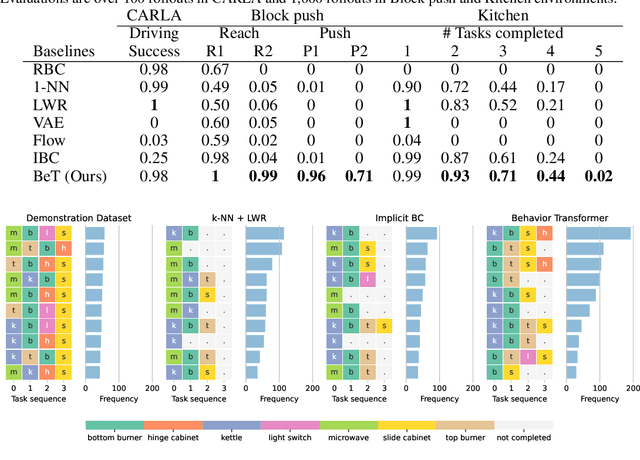
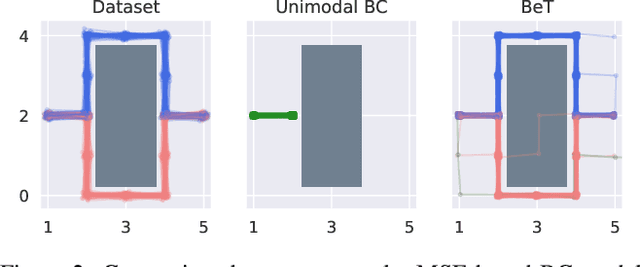
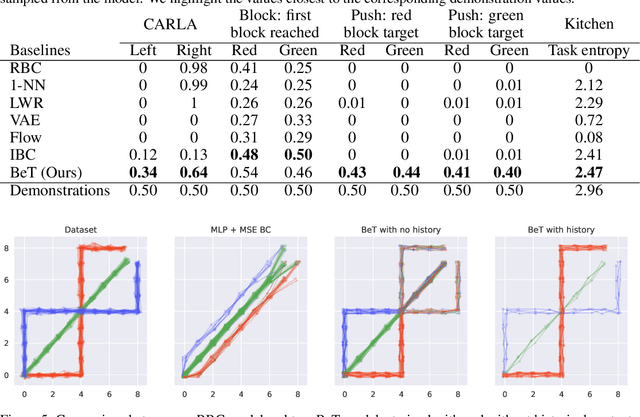
While behavior learning has made impressive progress in recent times, it lags behind computer vision and natural language processing due to its inability to leverage large, human-generated datasets. Human behaviors have wide variance, multiple modes, and human demonstrations typically do not come with reward labels. These properties limit the applicability of current methods in Offline RL and Behavioral Cloning to learn from large, pre-collected datasets. In this work, we present Behavior Transformer (BeT), a new technique to model unlabeled demonstration data with multiple modes. BeT retrofits standard transformer architectures with action discretization coupled with a multi-task action correction inspired by offset prediction in object detection. This allows us to leverage the multi-modal modeling ability of modern transformers to predict multi-modal continuous actions. We experimentally evaluate BeT on a variety of robotic manipulation and self-driving behavior datasets. We show that BeT significantly improves over prior state-of-the-art work on solving demonstrated tasks while capturing the major modes present in the pre-collected datasets. Finally, through an extensive ablation study, we analyze the importance of every crucial component in BeT. Videos of behavior generated by BeT are available at https://notmahi.github.io/bet