 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCIVIL: Causal and Intuitive Visual Imitation Learning
Apr 24, 2025



Today's robots learn new tasks by imitating human examples. However, this standard approach to visual imitation learning is fundamentally limited: the robot observes what the human does, but not why the human chooses those behaviors. Without understanding the features that factor into the human's decisions, robot learners often misinterpret the data and fail to perform the task when the environment changes. We therefore propose a shift in perspective: instead of asking human teachers just to show what actions the robot should take, we also enable humans to indicate task-relevant features using markers and language prompts. Our proposed algorithm, CIVIL, leverages this augmented data to filter the robot's visual observations and extract a feature representation that causally informs human actions. CIVIL then applies these causal features to train a transformer-based policy that emulates human behaviors without being confused by visual distractors. Our simulations, real-world experiments, and user study demonstrate that robots trained with CIVIL can learn from fewer human demonstrations and perform better than state-of-the-art baselines, especially in previously unseen scenarios. See videos at our project website: https://civil2025.github.io
PECAN: Personalizing Robot Behaviors through a Learned Canonical Space
Jul 22, 2024



Robots should personalize how they perform tasks to match the needs of individual human users. Today's robot achieve this personalization by asking for the human's feedback in the task space. For example, an autonomous car might show the human two different ways to decelerate at stoplights, and ask the human which of these motions they prefer. This current approach to personalization is indirect: based on the behaviors the human selects (e.g., decelerating slowly), the robot tries to infer their underlying preference (e.g., defensive driving). By contrast, our paper develops a learning and interface-based approach that enables humans to directly indicate their desired style. We do this by learning an abstract, low-dimensional, and continuous canonical space from human demonstration data. Each point in the canonical space corresponds to a different style (e.g., defensive or aggressive driving), and users can directly personalize the robot's behavior by simply clicking on a point. Given the human's selection, the robot then decodes this canonical style across each task in the dataset -- e.g., if the human selects a defensive style, the autonomous car personalizes its behavior to drive defensively when decelerating, passing other cars, or merging onto highways. We refer to our resulting approach as PECAN: Personalizing Robot Behaviors through a Learned Canonical Space. Our simulations and user studies suggest that humans prefer using PECAN to directly personalize robot behavior (particularly when those users become familiar with PECAN), and that users find the learned canonical space to be intuitive and consistent. See videos here: https://youtu.be/wRJpyr23PKI
Combining and Decoupling Rigid and Soft Grippers to Enhance Robotic Manipulation
Apr 21, 2024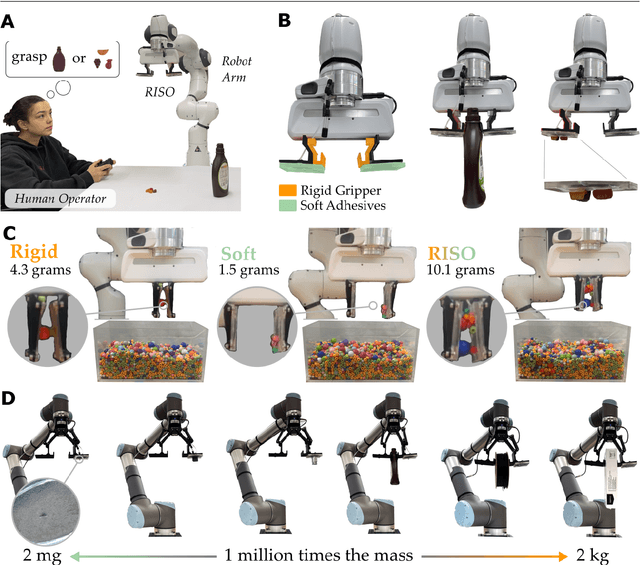
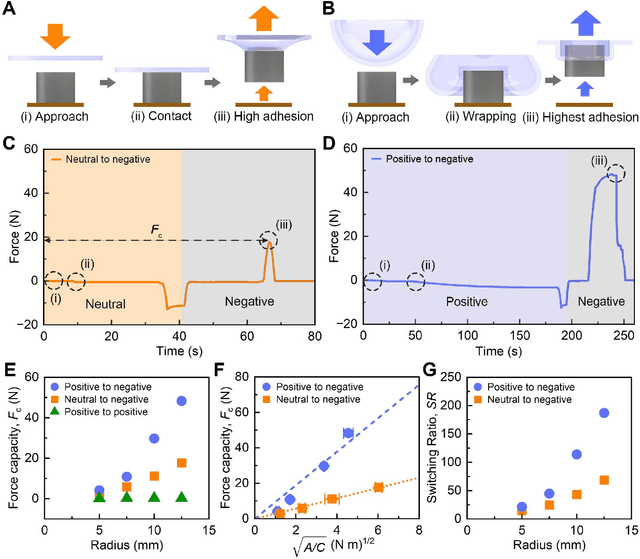
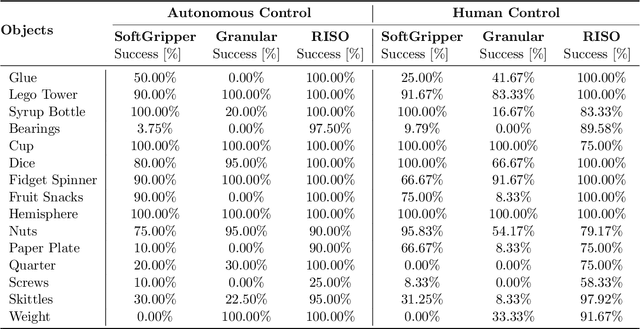
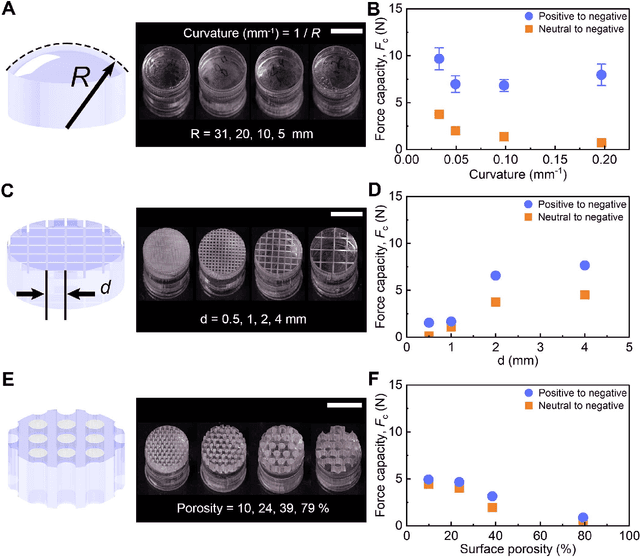
For robot arms to perform everyday tasks in unstructured environments, these robots must be able to manipulate a diverse range of objects. Today's robots often grasp objects with either soft grippers or rigid end-effectors. However, purely rigid or purely soft grippers have fundamental limitations: soft grippers struggle with irregular, heavy objects, while rigid grippers often cannot grasp small, numerous items. In this paper we therefore introduce RISOs, a mechanics and controls approach for unifying traditional RIgid end-effectors with a novel class of SOft adhesives. When grasping an object, RISOs can use either the rigid end-effector (pinching the item between non-deformable fingers) and/or the soft materials (attaching and releasing items with switchable adhesives). This enhances manipulation capabilities by combining and decoupling rigid and soft mechanisms. With RISOs robots can perform grasps along a spectrum from fully rigid, to fully soft, to rigid-soft, enabling real time object manipulation across a 1 million times range in weight (from 2 mg to 2 kg). To develop RISOs we first model and characterize the soft switchable adhesives. We then mount sheets of these soft adhesives on the surfaces of rigid end-effectors, and develop control strategies that make it easier for robot arms and human operators to utilize RISOs. The resulting RISO grippers were able to pick-up, carry, and release a larger set of objects than existing grippers, and participants also preferred using RISO. Overall, our experimental and user study results suggest that RISOs provide an exceptional gripper range in both capacity and object diversity. See videos of our user studies here: https://youtu.be/du085R0gPFI