 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKiri-Spoon: A Kirigami Utensil for Robot-Assisted Feeding
Jan 02, 2025
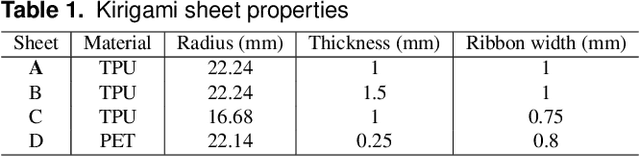
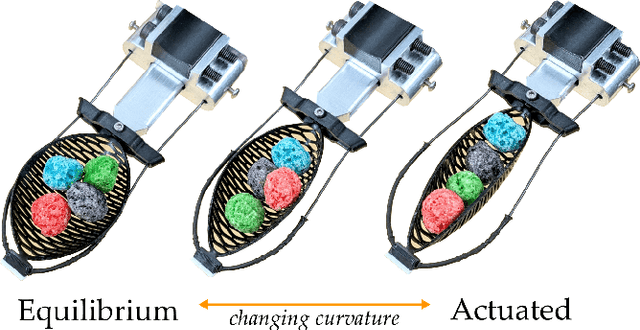
For millions of adults with mobility limitations, eating meals is a daily challenge. A variety of robotic systems have been developed to address this societal need. Unfortunately, end-user adoption of robot-assisted feeding is limited, in part because existing devices are unable to seamlessly grasp, manipulate, and feed diverse foods. Recent works seek to address this issue by creating new algorithms for food acquisition and bite transfer. In parallel to these algorithmic developments, however, we hypothesize that mechanical intelligence will make it fundamentally easier for robot arms to feed humans. We therefore propose Kiri-Spoon, a soft utensil specifically designed for robot-assisted feeding. Kiri-Spoon consists of a spoon-shaped kirigami structure: when actuated, the kirigami sheet deforms into a bowl of increasing curvature. Robot arms equipped with Kiri-Spoon can leverage the kirigami structure to wrap-around morsels during acquisition, contain those items as the robot moves, and then compliantly release the food into the user's mouth. Overall, Kiri-Spoon combines the familiar and comfortable shape of a standard spoon with the increased capabilities of soft robotic grippers. In what follows, we first apply a stakeholder-driven design process to ensure that Kiri-Spoon meets the needs of caregivers and users with physical disabilities. We next characterize the dynamics of Kiri-Spoon, and derive a mechanics model to relate actuation force to the spoon's shape. The paper concludes with three separate experiments that evaluate (a) the mechanical advantage provided by Kiri-Spoon, (b) the ways users with disabilities perceive our system, and (c) how the mechanical intelligence of Kiri-Spoon complements state-of-the-art algorithms. Our results suggest that Kiri-Spoon advances robot-assisted feeding across diverse foods, multiple robotic platforms, and different manipulation algorithms.
Combining and Decoupling Rigid and Soft Grippers to Enhance Robotic Manipulation
Apr 21, 2024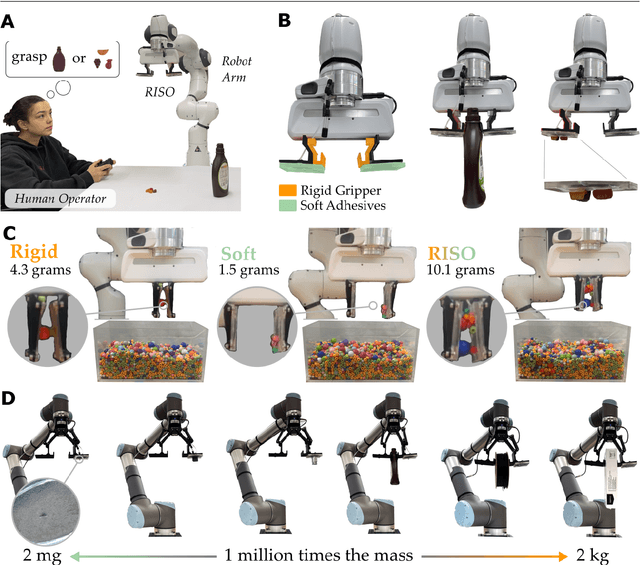
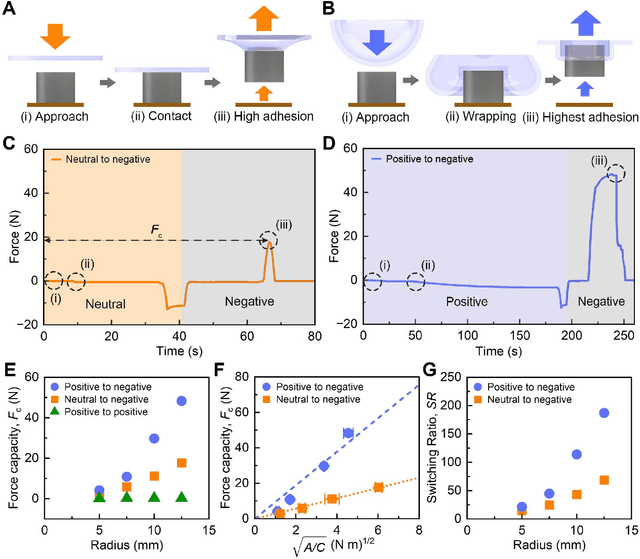
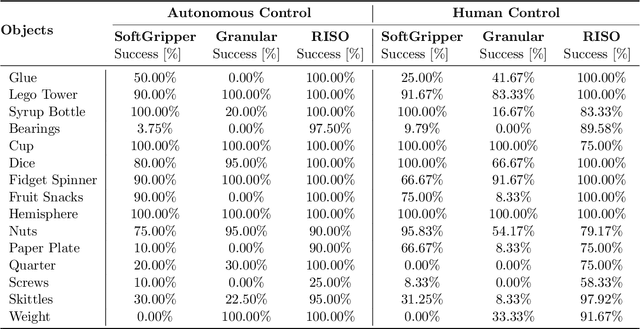
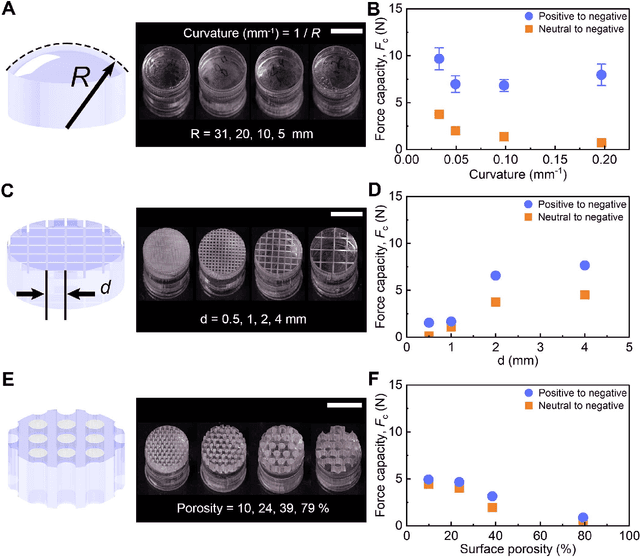
For robot arms to perform everyday tasks in unstructured environments, these robots must be able to manipulate a diverse range of objects. Today's robots often grasp objects with either soft grippers or rigid end-effectors. However, purely rigid or purely soft grippers have fundamental limitations: soft grippers struggle with irregular, heavy objects, while rigid grippers often cannot grasp small, numerous items. In this paper we therefore introduce RISOs, a mechanics and controls approach for unifying traditional RIgid end-effectors with a novel class of SOft adhesives. When grasping an object, RISOs can use either the rigid end-effector (pinching the item between non-deformable fingers) and/or the soft materials (attaching and releasing items with switchable adhesives). This enhances manipulation capabilities by combining and decoupling rigid and soft mechanisms. With RISOs robots can perform grasps along a spectrum from fully rigid, to fully soft, to rigid-soft, enabling real time object manipulation across a 1 million times range in weight (from 2 mg to 2 kg). To develop RISOs we first model and characterize the soft switchable adhesives. We then mount sheets of these soft adhesives on the surfaces of rigid end-effectors, and develop control strategies that make it easier for robot arms and human operators to utilize RISOs. The resulting RISO grippers were able to pick-up, carry, and release a larger set of objects than existing grippers, and participants also preferred using RISO. Overall, our experimental and user study results suggest that RISOs provide an exceptional gripper range in both capacity and object diversity. See videos of our user studies here: https://youtu.be/du085R0gPFI