 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeighbor-aware Instance Refining with Noisy Labels for Cross-Modal Retrieval
Dec 30, 2025In recent years, Cross-Modal Retrieval (CMR) has made significant progress in the field of multi-modal analysis. However, since it is time-consuming and labor-intensive to collect large-scale and well-annotated data, the annotation of multi-modal data inevitably contains some noise. This will degrade the retrieval performance of the model. To tackle the problem, numerous robust CMR methods have been developed, including robust learning paradigms, label calibration strategies, and instance selection mechanisms. Unfortunately, they often fail to simultaneously satisfy model performance ceilings, calibration reliability, and data utilization rate. To overcome the limitations, we propose a novel robust cross-modal learning framework, namely Neighbor-aware Instance Refining with Noisy Labels (NIRNL). Specifically, we first propose Cross-modal Margin Preserving (CMP) to adjust the relative distance between positive and negative pairs, thereby enhancing the discrimination between sample pairs. Then, we propose Neighbor-aware Instance Refining (NIR) to identify pure subset, hard subset, and noisy subset through cross-modal neighborhood consensus. Afterward, we construct different tailored optimization strategies for this fine-grained partitioning, thereby maximizing the utilization of all available data while mitigating error propagation. Extensive experiments on three benchmark datasets demonstrate that NIRNL achieves state-of-the-art performance, exhibiting remarkable robustness, especially under high noise rates.
Noisy-Correspondence Learning for Text-to-Image Person Re-identification
Aug 19, 2023

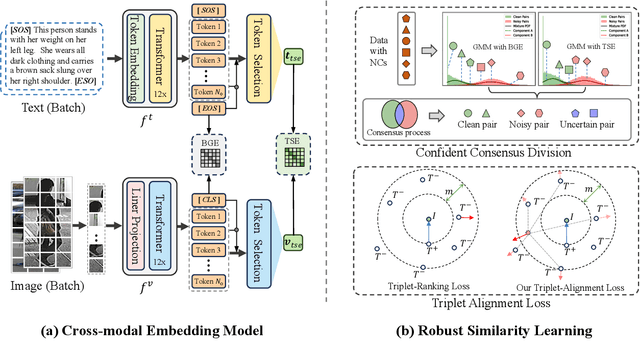

Text-to-image person re-identification (TIReID) is a compelling topic in the cross-modal community, which aims to retrieve the target person based on a textual query. Although numerous TIReID methods have been proposed and achieved promising performance, they implicitly assume the training image-text pairs are correctly aligned, which is not always the case in real-world scenarios. In practice, the image-text pairs inevitably exist under-correlated or even false-correlated, a.k.a noisy correspondence (NC), due to the low quality of the images and annotation errors. To address this problem, we propose a novel Robust Dual Embedding method (RDE) that can learn robust visual-semantic associations even with NC. Specifically, RDE consists of two main components: 1) A Confident Consensus Division (CCD) module that leverages the dual-grained decisions of dual embedding modules to obtain a consensus set of clean training data, which enables the model to learn correct and reliable visual-semantic associations. 2) A Triplet-Alignment Loss (TAL) relaxes the conventional triplet-ranking loss with hardest negatives, which tends to rapidly overfit NC, to a log-exponential upper bound over all negatives, thus preventing the model from overemphasizing false image-text pairs. We conduct extensive experiments on three public benchmarks, namely CUHK-PEDES, ICFG-PEDES, and RSTPReID, to evaluate the performance and robustness of our RDE. Our method achieves state-of-the-art results both with and without synthetic noisy correspondences on all three datasets.
Intention Recognition for Multiple Agents
Dec 05, 2021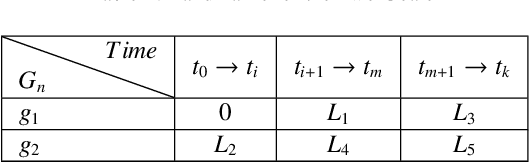
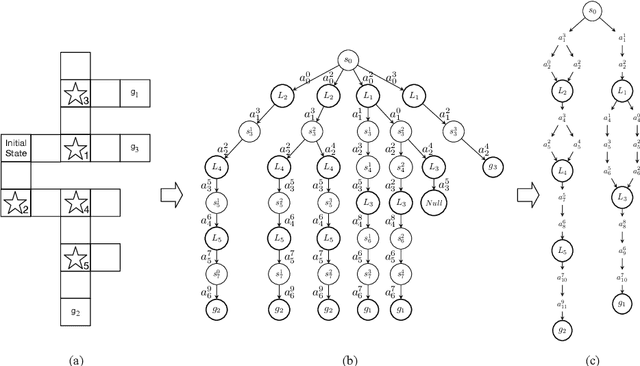
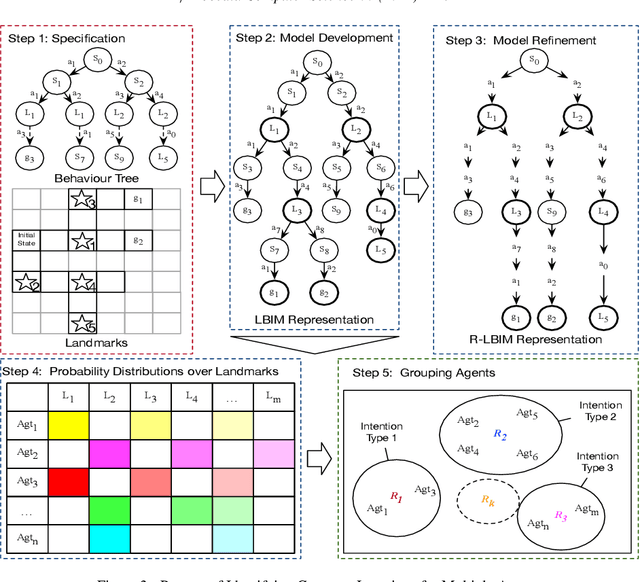
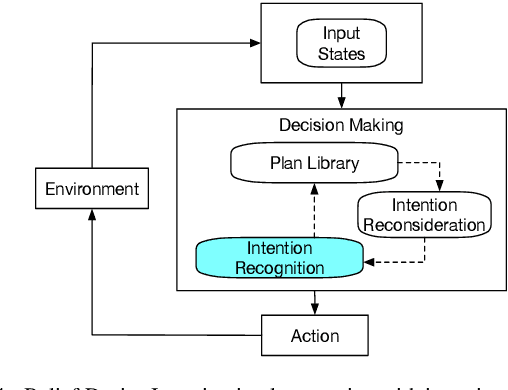
Intention recognition is an important step to facilitate collaboration in multi-agent systems. Existing work mainly focuses on intention recognition in a single-agent setting and uses a descriptive model, e.g. Bayesian networks, in the recognition process. In this paper, we resort to a prescriptive approach to model agents' behaviour where which their intentions are hidden in implementing their plans. We introduce landmarks into the behavioural model therefore enhancing informative features for identifying common intentions for multiple agents. We further refine the model by focusing only action sequences in their plan and provide a light model for identifying and comparing their intentions. The new models provide a simple approach of grouping agents' common intentions upon partial plans observed in agents' interactions. We provide experimental results in support.
HTMLPhish: Enabling Accurate Phishing Web Page Detection by Applying Deep Learning Techniques on HTML Analysis
Aug 28, 2019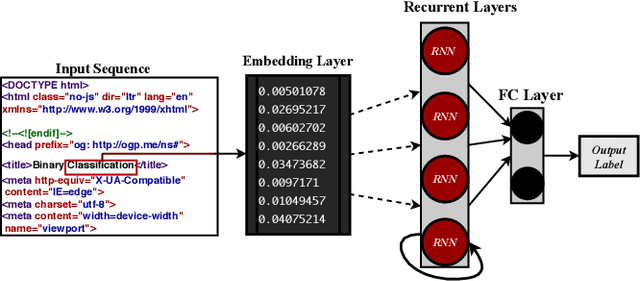
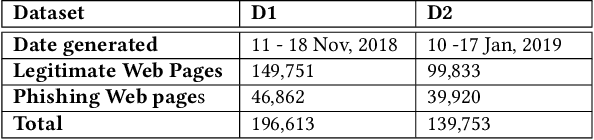
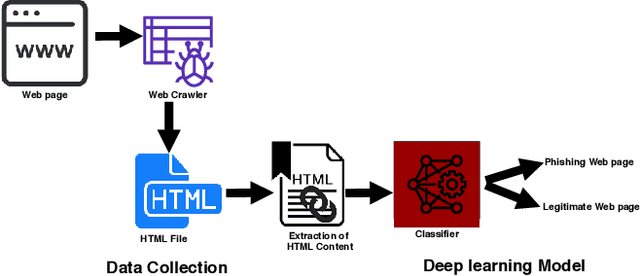
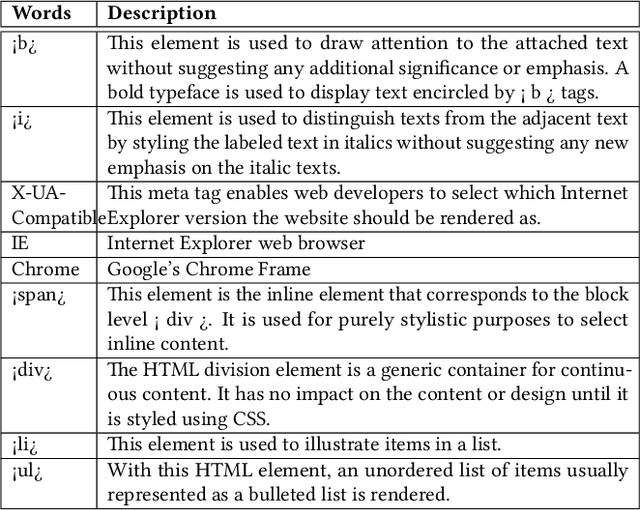
Recently, the development and implementation of phishing attacks require little technical skills and costs. This uprising has led to an ever-growing number of phishing attacks on the World Wide Web daily. Consequently, proactive techniques to fight phishing attacks have become extremely necessary. In this paper, we propose a deep learning model HTMLPhish based on the HTML analysis of a web page for accurate phishing attack detection. By using our proposed HTMLPhish, the experimental results on a dataset of over 300,000 web pages yielded 97.2% accuracy, which significantly outperforms the traditional machine learning methods such as Support Vector Machine, Random Forest and Logistics Regression. We also show the advantage of HTMLPhish in the aspect of the temporal stability and robustness by testing our proposed model on a dataset collected after two months when the model was trained. In addition, HTMLPhish is a completely language-independent and client-side strategy which can, therefore, conduct web page phishing detection regardless of the textual language.
Individual Planning in Agent Populations: Exploiting Anonymity and Frame-Action Hypergraphs
Apr 02, 2015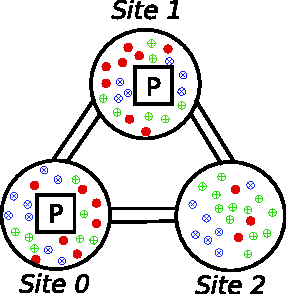
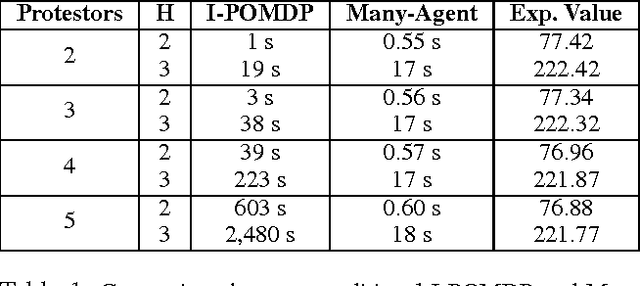
Interactive partially observable Markov decision processes (I-POMDP) provide a formal framework for planning for a self-interested agent in multiagent settings. An agent operating in a multiagent environment must deliberate about the actions that other agents may take and the effect these actions have on the environment and the rewards it receives. Traditional I-POMDPs model this dependence on the actions of other agents using joint action and model spaces. Therefore, the solution complexity grows exponentially with the number of agents thereby complicating scalability. In this paper, we model and extend anonymity and context-specific independence -- problem structures often present in agent populations -- for computational gain. We empirically demonstrate the efficiency from exploiting these problem structures by solving a new multiagent problem involving more than 1,000 agents.
* 8 page article plus two page appendix containing proofs in Proceedings of 25th International Conference on Autonomous Planning and Scheduling, 2015
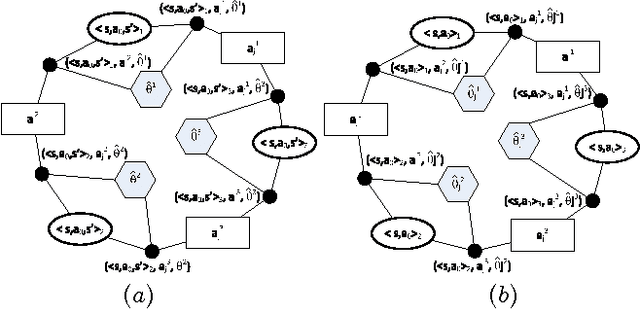
Team Behavior in Interactive Dynamic Influence Diagrams with Applications to Ad Hoc Teams
Sep 01, 2014
Planning for ad hoc teamwork is challenging because it involves agents collaborating without any prior coordination or communication. The focus is on principled methods for a single agent to cooperate with others. This motivates investigating the ad hoc teamwork problem in the context of individual decision making frameworks. However, individual decision making in multiagent settings faces the task of having to reason about other agents' actions, which in turn involves reasoning about others. An established approximation that operationalizes this approach is to bound the infinite nesting from below by introducing level 0 models. We show that a consequence of the finitely-nested modeling is that we may not obtain optimal team solutions in cooperative settings. We address this limitation by including models at level 0 whose solutions involve learning. We demonstrate that the learning integrated into planning in the context of interactive dynamic influence diagrams facilitates optimal team behavior, and is applicable to ad hoc teamwork.
Learning Markov Decision Processes for Model Checking
Dec 17, 2012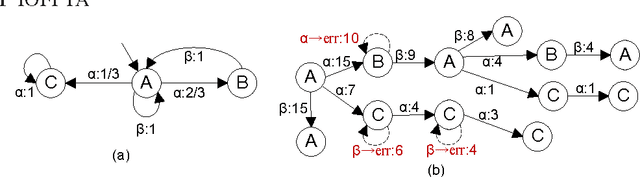
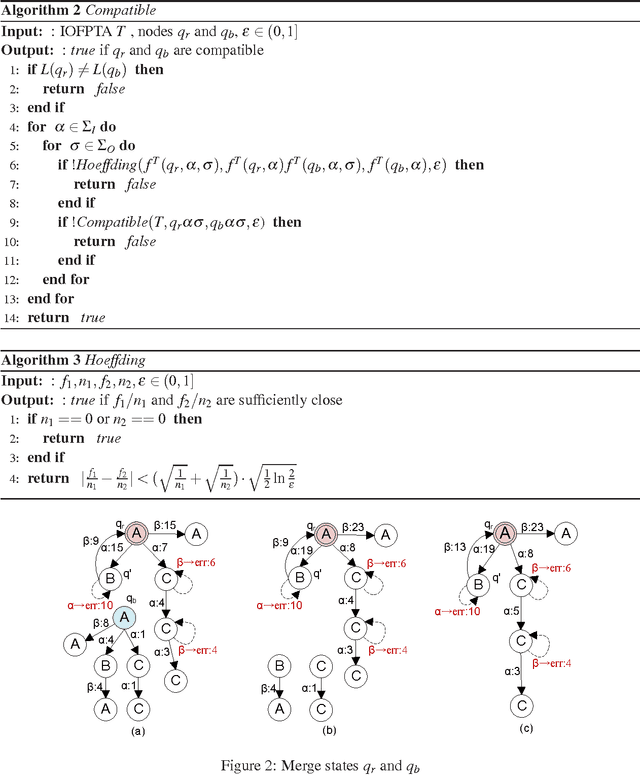
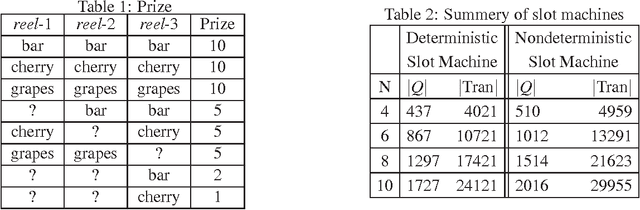
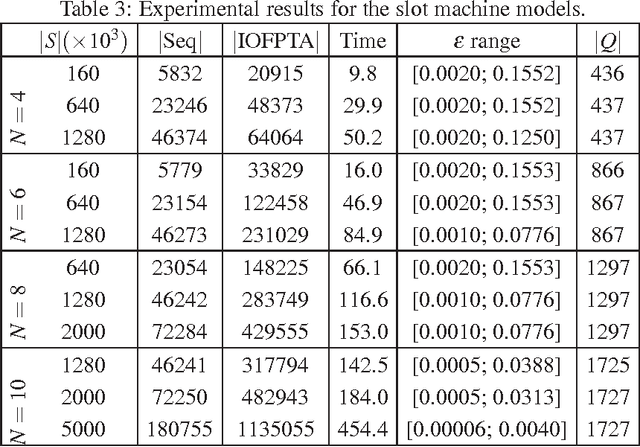
Constructing an accurate system model for formal model verification can be both resource demanding and time-consuming. To alleviate this shortcoming, algorithms have been proposed for automatically learning system models based on observed system behaviors. In this paper we extend the algorithm on learning probabilistic automata to reactive systems, where the observed system behavior is in the form of alternating sequences of inputs and outputs. We propose an algorithm for automatically learning a deterministic labeled Markov decision process model from the observed behavior of a reactive system. The proposed learning algorithm is adapted from algorithms for learning deterministic probabilistic finite automata, and extended to include both probabilistic and nondeterministic transitions. The algorithm is empirically analyzed and evaluated by learning system models of slot machines. The evaluation is performed by analyzing the probabilistic linear temporal logic properties of the system as well as by analyzing the schedulers, in particular the optimal schedulers, induced by the learned models.
* In Proceedings QFM 2012, arXiv:1212.3454