 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthICL: Scalable In-context Imitation Learning with Synthetic Data
Jun 06, 2026In-context imitation learning (ICIL) enables robots to learn new tasks from a small number of demonstrations by conditioning a pre-trained policy on task-specific examples, without retraining at test time. Despite this promise, training generalizable and scalable in-context imitation policies remains an open challenge. We present SynthICL, a scalable framework that trains ICIL policies entirely from RGB-only synthetic data. Specifically, we build a data generation pipeline to produce high-fidelity ICIL data and train a flow-matching transformer policy on the resulting dataset. SynthICL avoids the need for depth sensing, precise camera calibration, and real-world training data in prior approaches, offering a simpler and more scalable alternative. We further incorporate subgoal prediction by training the model to predict the next subgoal images, enabling more precise and visually grounded control. Evaluated on 16 unseen real-world manipulation tasks, SynthICL achieves an average success rate of 79% with only one demonstration provided at test time and outperforms prior methods. Project page: https://synth-icl.github.io
Dream2Real: Zero-Shot 3D Object Rearrangement with Vision-Language Models
Dec 07, 2023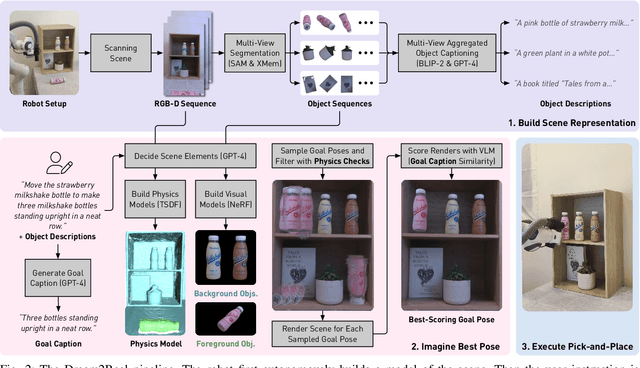
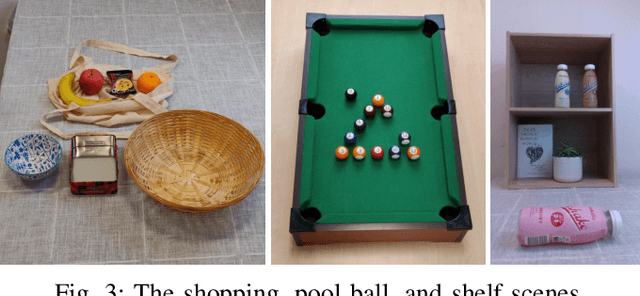
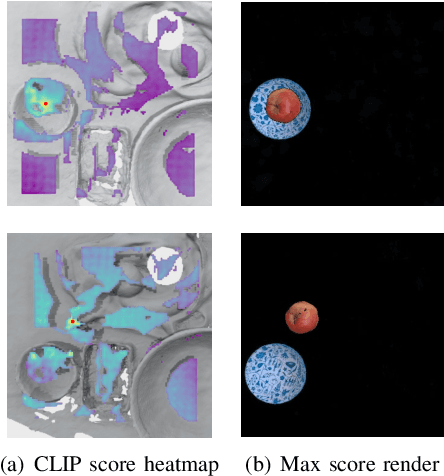
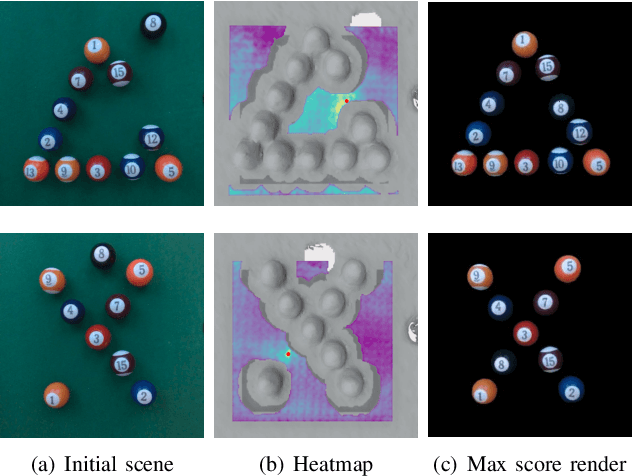
We introduce Dream2Real, a robotics framework which integrates vision-language models (VLMs) trained on 2D data into a 3D object rearrangement pipeline. This is achieved by the robot autonomously constructing a 3D representation of the scene, where objects can be rearranged virtually and an image of the resulting arrangement rendered. These renders are evaluated by a VLM, so that the arrangement which best satisfies the user instruction is selected and recreated in the real world with pick-and-place. This enables language-conditioned rearrangement to be performed zero-shot, without needing to collect a training dataset of example arrangements. Results on a series of real-world tasks show that this framework is robust to distractors, controllable by language, capable of understanding complex multi-object relations, and readily applicable to both tabletop and 6-DoF rearrangement tasks.
Learning Robust Kernel Ensembles with Kernel Average Pooling
Sep 30, 2022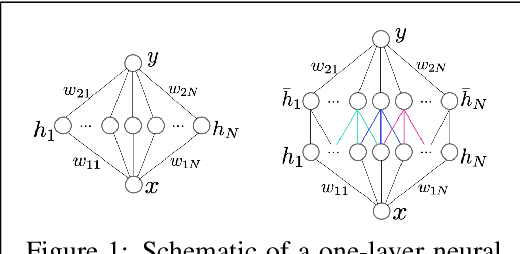
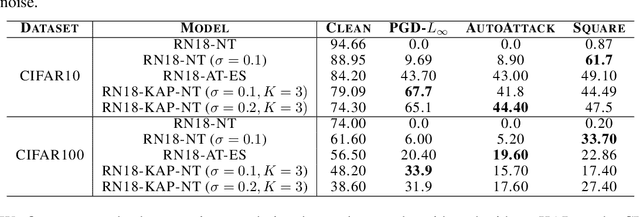
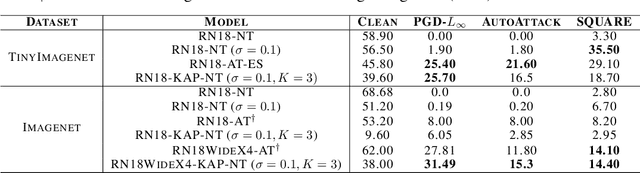
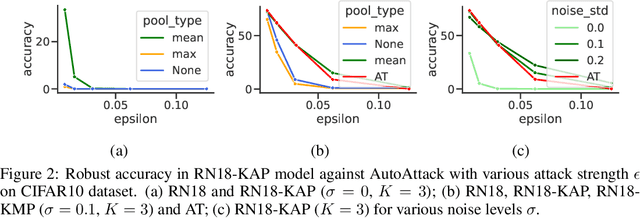
Model ensembles have long been used in machine learning to reduce the variance in individual model predictions, making them more robust to input perturbations. Pseudo-ensemble methods like dropout have also been commonly used in deep learning models to improve generalization. However, the application of these techniques to improve neural networks' robustness against input perturbations remains underexplored. We introduce Kernel Average Pool (KAP), a new neural network building block that applies the mean filter along the kernel dimension of the layer activation tensor. We show that ensembles of kernels with similar functionality naturally emerge in convolutional neural networks equipped with KAP and trained with backpropagation. Moreover, we show that when combined with activation noise, KAP models are remarkably robust against various forms of adversarial attacks. Empirical evaluations on CIFAR10, CIFAR100, TinyImagenet, and Imagenet datasets show substantial improvements in robustness against strong adversarial attacks such as AutoAttack that are on par with adversarially trained networks but are importantly obtained without training on any adversarial examples.
MULTIPAR: Supervised Irregular Tensor Factorization with Multi-task Learning
Aug 09, 2022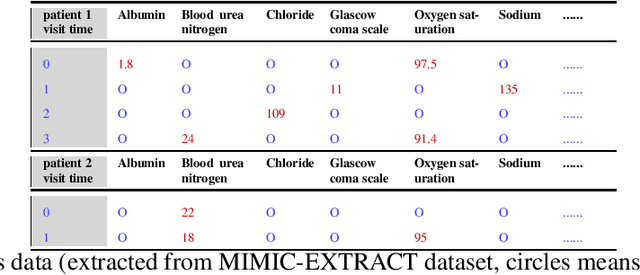
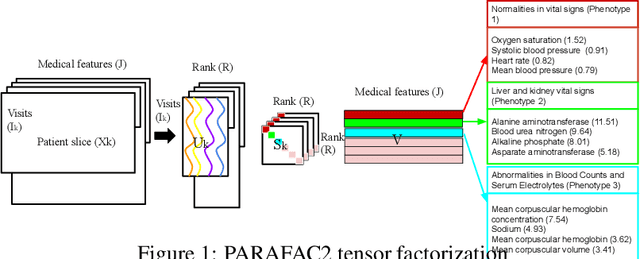
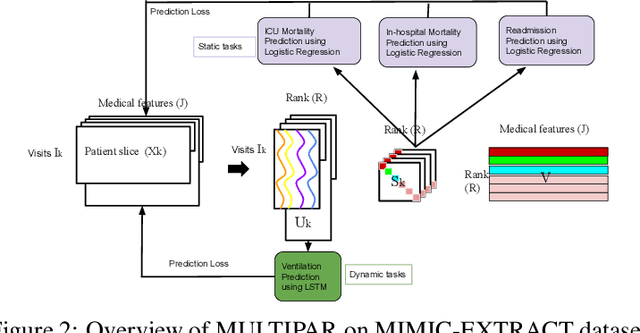
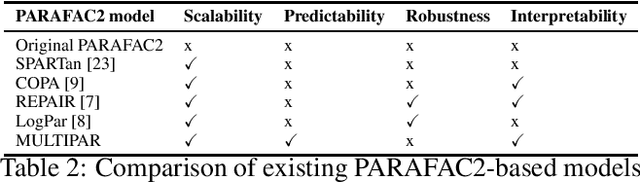
Tensor factorization has received increasing interest due to its intrinsic ability to capture latent factors in multi-dimensional data with many applications such as recommender systems and Electronic Health Records (EHR) mining. PARAFAC2 and its variants have been proposed to address irregular tensors where one of the tensor modes is not aligned, e.g., different users in recommender systems or patients in EHRs may have different length of records. PARAFAC2 has been successfully applied on EHRs for extracting meaningful medical concepts (phenotypes). Despite recent advancements, current models' predictability and interpretability are not satisfactory, which limits its utility for downstream analysis. In this paper, we propose MULTIPAR: a supervised irregular tensor factorization with multi-task learning. MULTIPAR is flexible to incorporate both static (e.g. in-hospital mortality prediction) and continuous or dynamic (e.g. the need for ventilation) tasks. By supervising the tensor factorization with downstream prediction tasks and leveraging information from multiple related predictive tasks, MULTIPAR can yield not only more meaningful phenotypes but also better predictive performance for downstream tasks. We conduct extensive experiments on two real-world temporal EHR datasets to demonstrate that MULTIPAR is scalable and achieves better tensor fit with more meaningful subgroups and stronger predictive performance compared to existing state-of-the-art methods.
Visual-Inertial Multi-Instance Dynamic SLAM with Object-level Relocalisation
Aug 08, 2022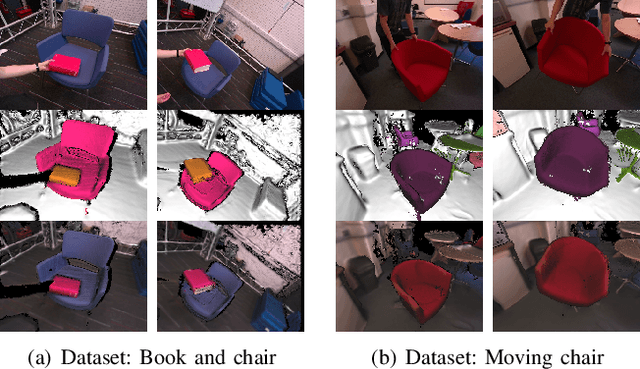
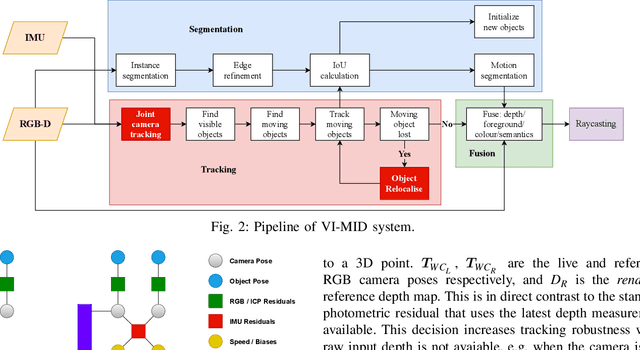
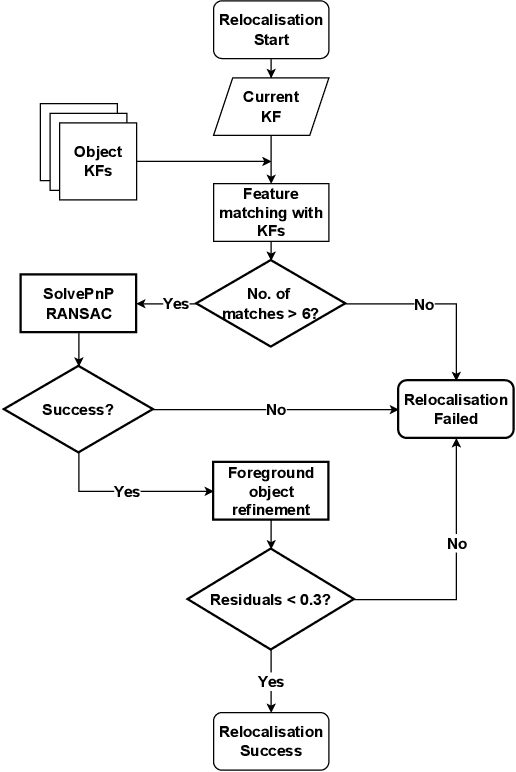
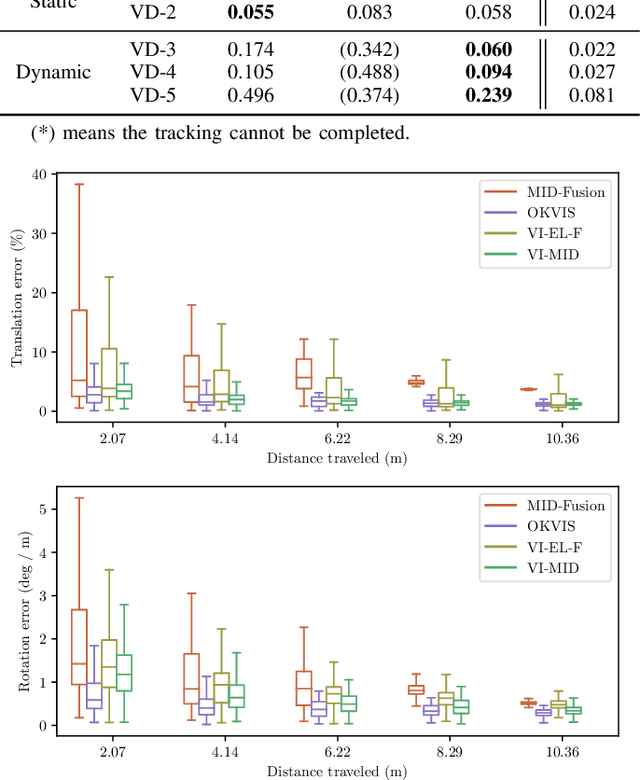
In this paper, we present a tightly-coupled visual-inertial object-level multi-instance dynamic SLAM system. Even in extremely dynamic scenes, it can robustly optimise for the camera pose, velocity, IMU biases and build a dense 3D reconstruction object-level map of the environment. Our system can robustly track and reconstruct the geometries of arbitrary objects, their semantics and motion by incrementally fusing associated colour, depth, semantic, and foreground object probabilities into each object model thanks to its robust sensor and object tracking. In addition, when an object is lost or moved outside the camera field of view, our system can reliably recover its pose upon re-observation. We demonstrate the robustness and accuracy of our method by quantitatively and qualitatively testing it in real-world data sequences.
Predictive Modeling with Delayed Information: a Case Study in E-commerce Transaction Fraud Control
Nov 14, 2018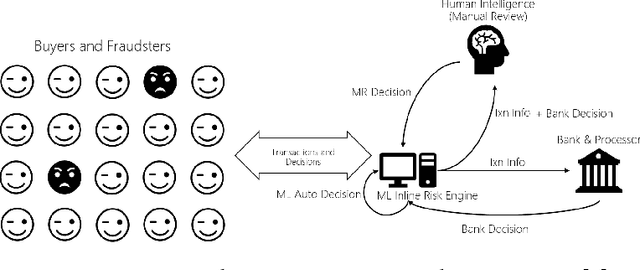
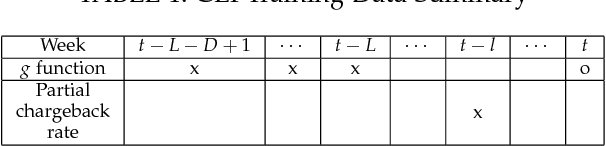
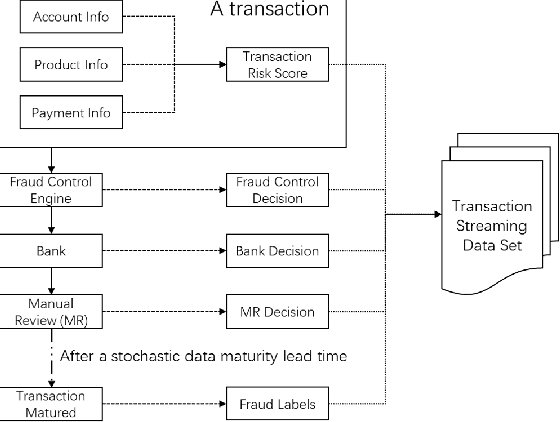
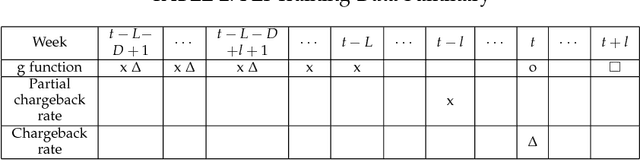
In Business Intelligence, accurate predictive modeling is the key for providing adaptive decisions. We studied predictive modeling problems in this research which was motivated by real-world cases that Microsoft data scientists encountered while dealing with e-commerce transaction fraud control decisions using transaction streaming data in an uncertain probabilistic decision environment. The values of most online transactions related features can return instantly, while the true fraud labels only return after a stochastic delay. Using partially mature data directly for predictive modeling in an uncertain probabilistic decision environment would lead to significant inaccuracy on risk decision-making. To improve accurate estimation of the probabilistic prediction environment, which leads to more accurate predictive modeling, two frameworks, Current Environment Inference (CEI) and Future Environment Inference (FEI), are proposed. These frameworks generated decision environment related features using long-term fully mature and short-term partially mature data, and the values of those features were estimated using varies of learning methods, including linear regression, random forest, gradient boosted tree, artificial neural network, and recurrent neural network. Performance tests were conducted using some e-commerce transaction data from Microsoft. Testing results suggested that proposed frameworks significantly improved the accuracy of decision environment estimation.