 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccurate and Interactive Visual-Inertial Sensor Calibration with Next-Best-View and Next-Best-Trajectory Suggestion
Sep 25, 2023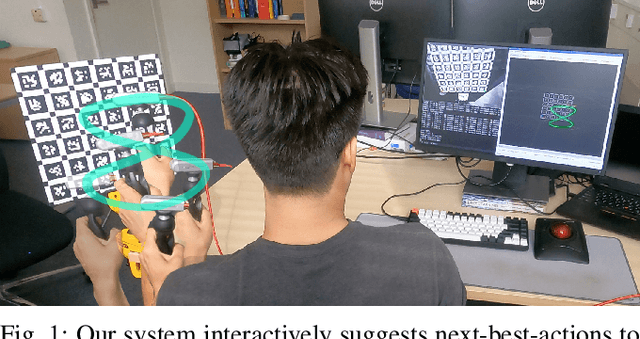

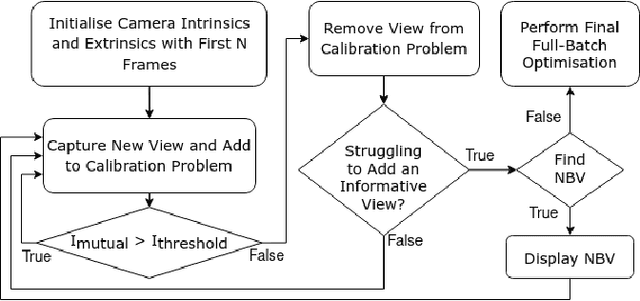
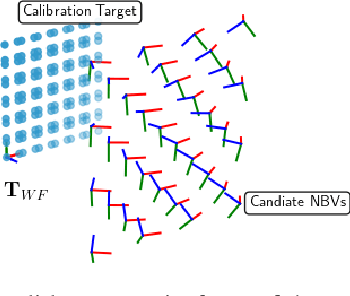
Visual-Inertial (VI) sensors are popular in robotics, self-driving vehicles, and augmented and virtual reality applications. In order to use them for any computer vision or state-estimation task, a good calibration is essential. However, collecting informative calibration data in order to render the calibration parameters observable is not trivial for a non-expert. In this work, we introduce a novel VI calibration pipeline that guides a non-expert with the use of a graphical user interface and information theory in collecting informative calibration data with Next-Best-View and Next-Best-Trajectory suggestions to calibrate the intrinsics, extrinsics, and temporal misalignment of a VI sensor. We show through experiments that our method is faster, more accurate, and more consistent than state-of-the-art alternatives. Specifically, we show how calibrations with our proposed method achieve higher accuracy estimation results when used by state-of-the-art VI Odometry as well as VI-SLAM approaches. The source code of our software can be found on: https://github.com/chutsu/yac.
Visual-Inertial Multi-Instance Dynamic SLAM with Object-level Relocalisation
Aug 08, 2022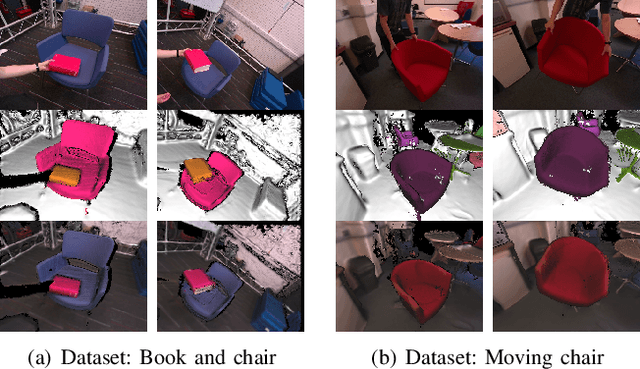
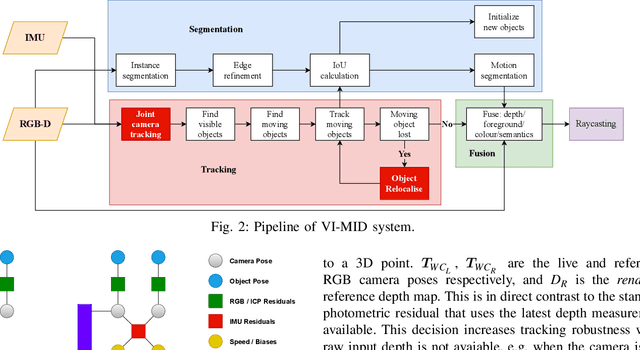
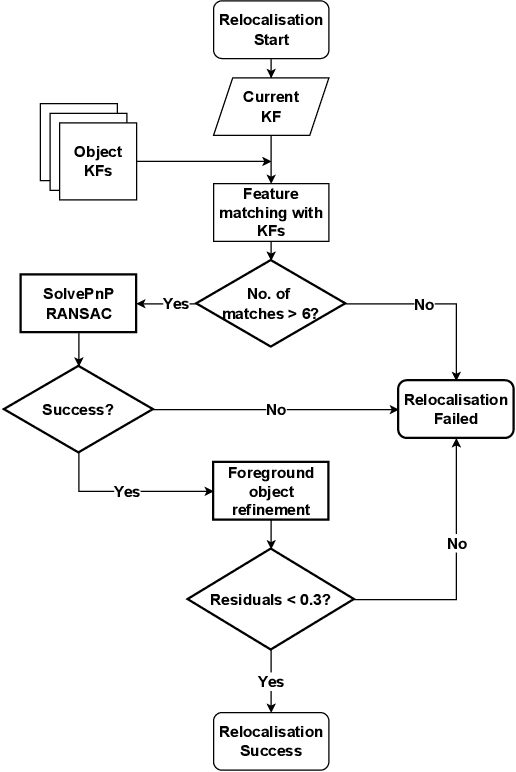
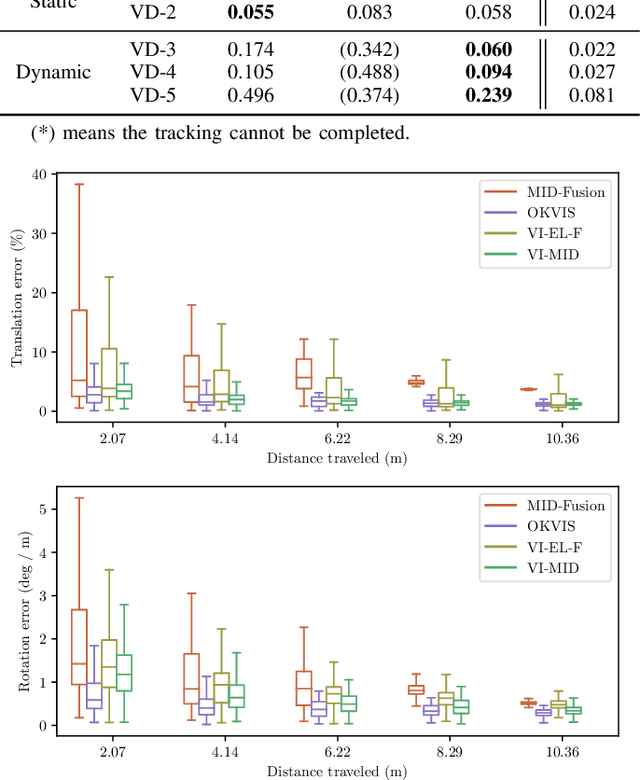
In this paper, we present a tightly-coupled visual-inertial object-level multi-instance dynamic SLAM system. Even in extremely dynamic scenes, it can robustly optimise for the camera pose, velocity, IMU biases and build a dense 3D reconstruction object-level map of the environment. Our system can robustly track and reconstruct the geometries of arbitrary objects, their semantics and motion by incrementally fusing associated colour, depth, semantic, and foreground object probabilities into each object model thanks to its robust sensor and object tracking. In addition, when an object is lost or moved outside the camera field of view, our system can reliably recover its pose upon re-observation. We demonstrate the robustness and accuracy of our method by quantitatively and qualitatively testing it in real-world data sequences.
Encoderless Gimbal Calibration of Dynamic Multi-Camera Clusters
Jul 24, 2018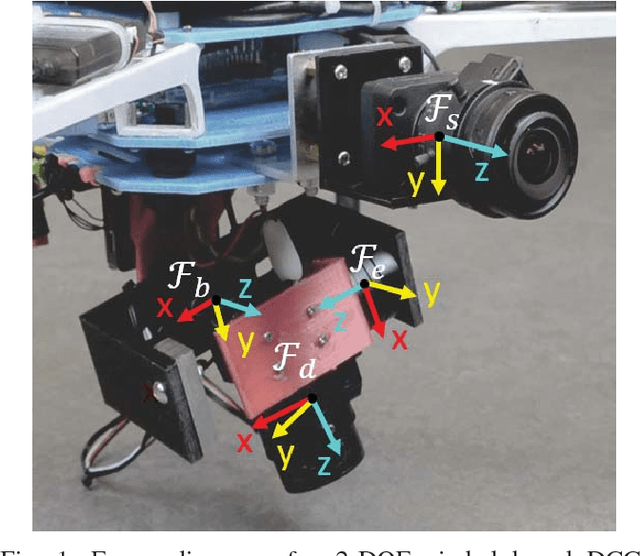
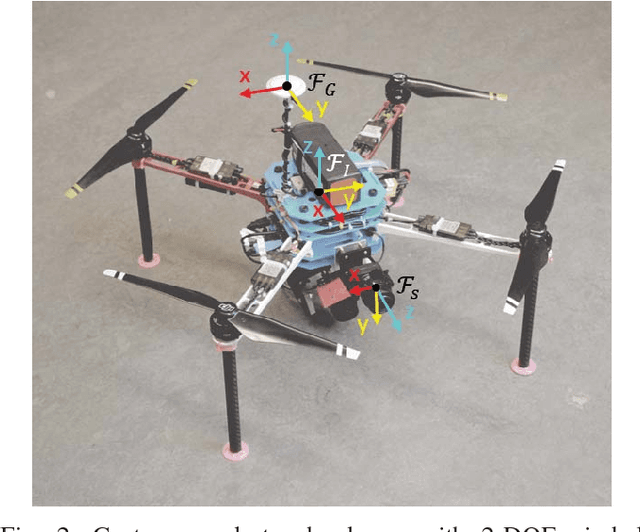
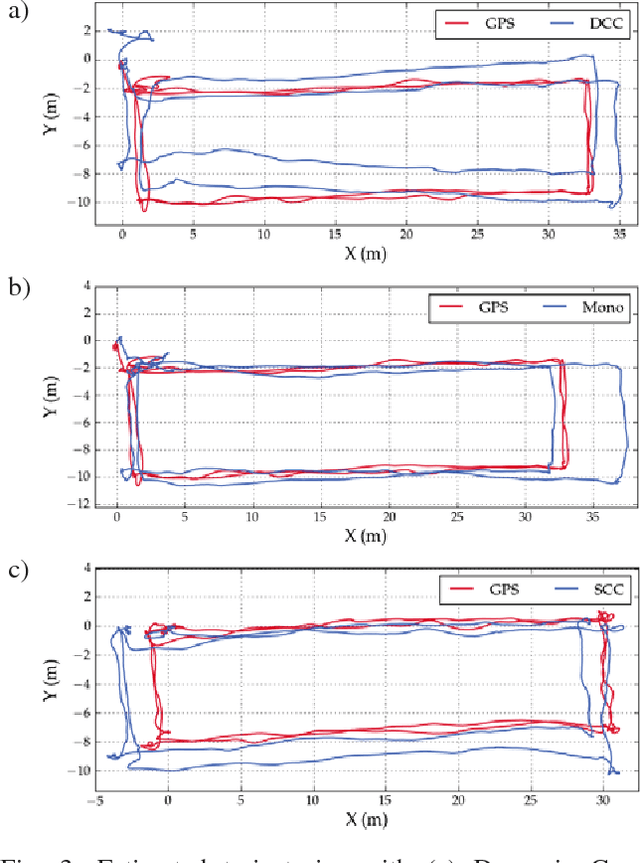
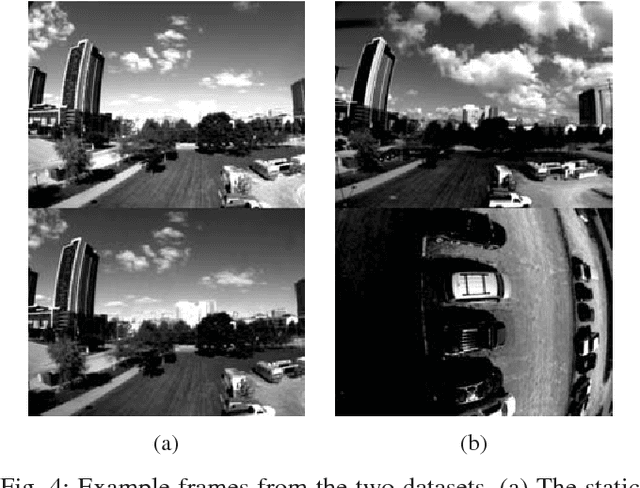
Dynamic Camera Clusters (DCCs) are multi-camera systems where one or more cameras are mounted on actuated mechanisms such as a gimbal. Existing methods for DCC calibration rely on joint angle measurements to resolve the time-varying transformation between the dynamic and static camera. This information is usually provided by motor encoders, however, joint angle measurements are not always readily available on off-the-shelf mechanisms. In this paper, we present an encoderless approach for DCC calibration which simultaneously estimates the kinematic parameters of the transformation chain as well as the unknown joint angles. We also demonstrate the integration of an encoderless gimbal mechanism with a state-of-the art VIO algorithm, and show the extensions required in order to perform simultaneous online estimation of the joint angles and vehicle localization state. The proposed calibration approach is validated both in simulation and on a physical DCC composed of a 2-DOF gimbal mounted on a UAV. Finally, we show the experimental results of the calibrated mechanism integrated into the OKVIS VIO package, and demonstrate successful online joint angle estimation while maintaining localization accuracy that is comparable to a standard static multi-camera configuration.